-
旋转矩阵左乘的理解
关于矩阵左乘和右乘的区别,看了不少数学解释,但这些解释对我个人来说是数字的游戏,对做有物理含义的应用帮助不是很大(也可能是我水平不够)。这里我们既谈左右乘,又抛开左右乘,重点看旋转矩阵的实际使用含义。
旋转矩阵的乘法,在我目前做的方向上主要有两个用途:
- 求点的坐标(旋转矩阵和点相乘)
- 求新的旋转矩阵(旋转矩阵和旋转矩阵相乘)
1. 点的坐标变换
实际上旋转矩阵或者变换矩阵和点相乘,只有一种乘法顺序,即矩阵在左,点坐标在右,对于点来说始终是左乘一个旋转或者变换矩阵。重点就在于旋转或者变换矩阵本身表示的关系中,哪一个是原始坐标系,哪一个是新坐标系。以及点的坐标是原始坐标系下的点还是新坐标系下的点。
1.1 坐标系不变,点变化(向量旋转)

如上图所示,坐标系不变,点的位置经过旋转,到了一个新的位置(也可以看做向量的旋转)。计算公式为:
P ′ = R z ( a ) ⋅ P " role="presentation" style="position: relative;">这个不用多说,很符合我们的认知习惯,为了求出旋转后的P',需要知道原始点P,以及P如何变化到P'的旋转变换关系。我们把这个变化关系的顺序写的清楚一些,Rp'p表示从p点变换到p'点的变换关系,方便下面比较。
P ′ = R p ′ p ⋅ P " role="presentation" style="position: relative;">1.2点不变,坐标系变换
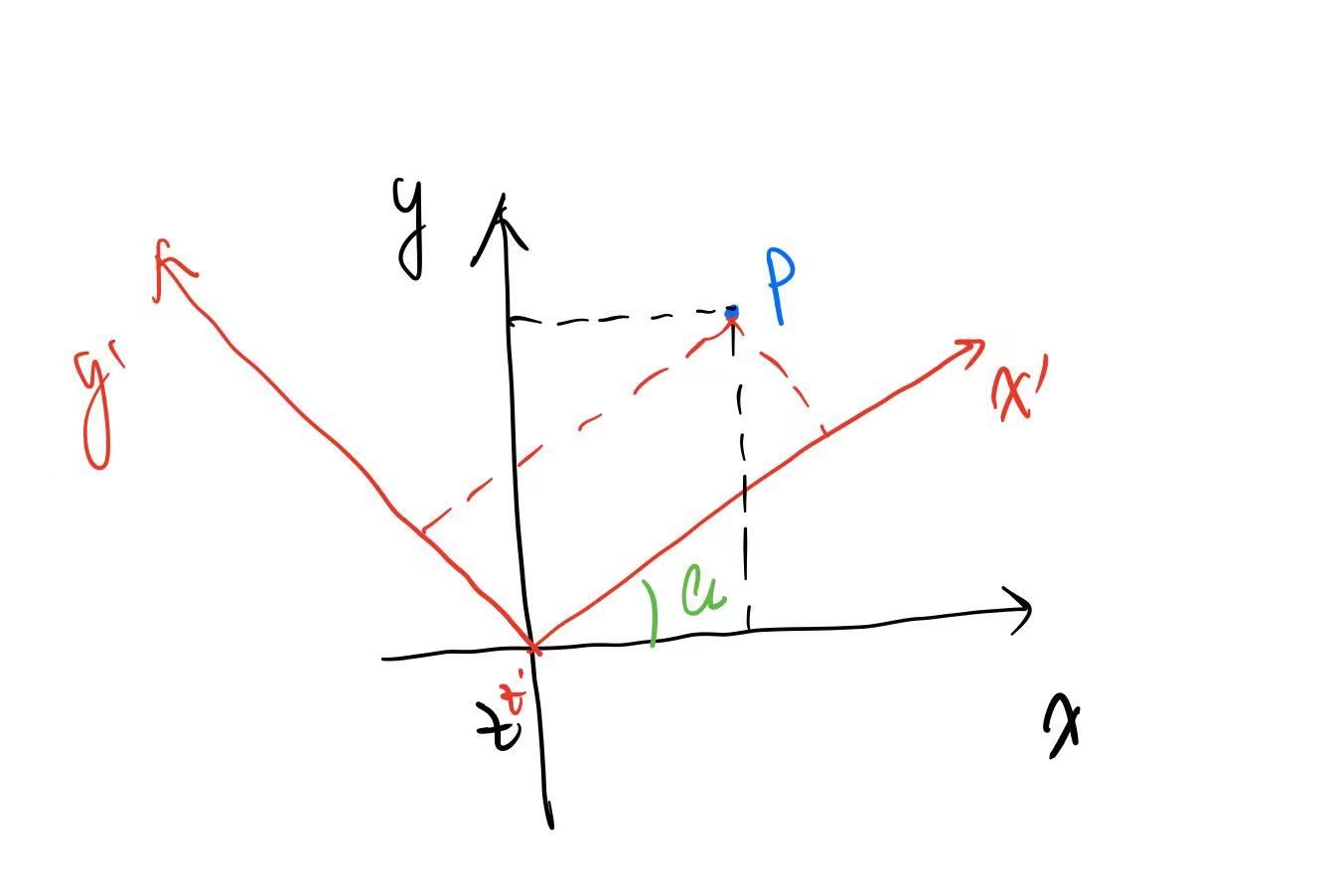
如下图所示,原始坐标系为o-xyz经过绕z轴旋转角度a,得到新的坐标系o-x'y'z',图中p点的绝对位置没有发生变化,但是p点在两个坐标系中的表示一定不同,即p点在两个坐标系中的坐标不同。已知p点在o-xyz的坐标,求p点在o-x'y'z'中的坐标。
这个应用非常的常见,在自动驾驶场景中,经常已知将传感器坐标系下的点,和传感器坐标到世界坐标系的变换矩阵,求这个点在世界坐标系下的位置。
计算公式为:
P = R z ( a ) ⋅ P ′ 一般的公式都会写成上面的形式,P点是o-xyz坐标系下的坐标,P'是o-x'y'z'坐标系下的坐标。但是这个旋转矩阵R表示的含义不明确。实际上是o-xyz变换到o-x'y'z'的变换关系。换成下面的写法(Ro'o表示o-xyz变换到o-x'y'z'的变换,这个下标的写法和定义非常的重要)
P = R o ′ o ⋅ P ′ 注意,这个坐标系固定,点变化的情况有相反的地方。即这个公式通常我们都是知道P和Ro'o,去求P'的。所以并不能直接使用公式。写成我们习惯看的形式,相当于上面的公式乘以了矩阵的逆,而这样物理含义就变了。
P ′ = R o o ′ ⋅ P " role="presentation" style="position: relative;">这个解释起来有点别扭,就是在坐标系变化但点不变时,需要用新坐标系向着原坐标系转换的转换矩阵(不是原坐标系向新坐标系的转换),乘以原坐标系的点 。牢记这点。
2. 坐标系之间的变换
坐标系之间的变化涉及到左右乘的区别,但对于矩阵之间的乘法这种变化,明确下标表示和内项相消的数学表达,就可以忘掉左右乘。
2.1 关于矩阵及下标的描述
这个非常的重要,如果没有定义好矩阵下标和坐标系之间变化的关系,就会彻底陷入混乱。和上文中定义的方法一样。
M 1 , 2 2.2 内项相消及连续乘法
对于矩阵乘法来说,是遵循内项相消的。也就是说
M 1 , 3 = M 1 , 2 ∗ M 2 , 3 M 2 , 3 M 1 , 2 M 1 , 3 3. 既有点变换,又有坐标系变换
自动驾驶中经常涉及到这样的场景,已知世界坐标系到IMU坐标系的关系
M i m u , w o r l d M l i d a r , i m u P l i d a r P w o r l d = M l i d a r , i m u ∗ M i m u , w o r l d P l i d a r -
相关阅读:
GStreamer在Linux平台的交叉编译
Nvidia GPU 入门教程之 07 TensorFlow MNiST GPU A100(教程含源码)
阿里云通用算力型u1云服务器配置性能评测及价格参考
UDS诊断网络层ISO15765-2(CAN)
【全志T113-S3_100ask】8-USB串口获取GPS数据(含解析)
Pandas.read_csv()函数及全部参数使用方法一文详解+实例代码
[java刷算法]牛客—剑指offer插入排序、双指针解题
[附源码]Python计算机毕业设计SSM健身俱乐部管理系统(程序+LW)
MySQL 50 题。
富满FM5001H电源IC移动风扇IC
- 原文地址:https://blog.csdn.net/weixin_41232202/article/details/132721989