-
imu预积分处理
VINS-Mono是HKUST的Shen Shaojie团队开源的一套非常优秀的Visual-Inertial融合定位算法。关于算法的介绍以及论文可以通过此链接查看。
IMU、ˆω和ˆa的原始陀螺仪和加速度计测量值由下式给出:

在车身坐标系测量的IMU测量结合了抗重力和平台动力学的力,受加速度偏置ba、陀螺仪偏置bw和加性噪声的影响。
我们假设这个额外的噪声为加速度噪声和陀螺仪噪声。这些噪声服从高斯噪声分布。

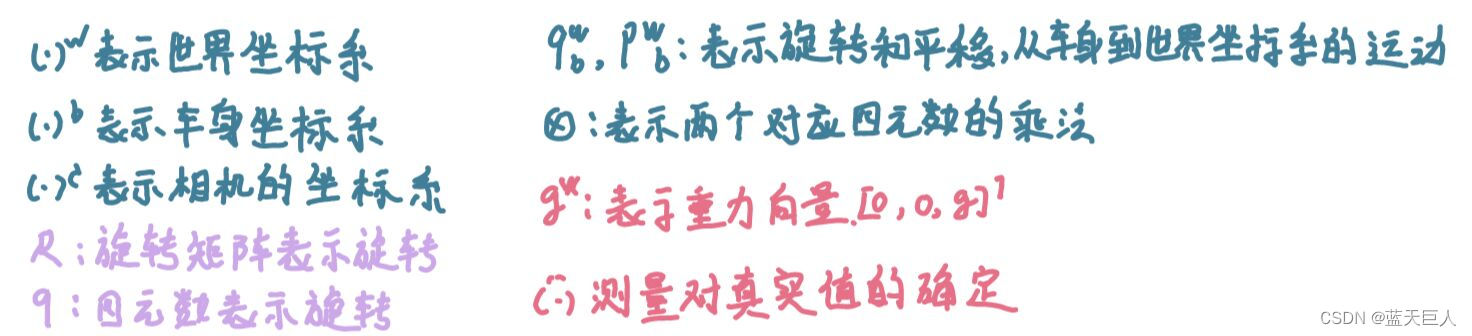
给定对应于图像帧bk和bk+1的两个时间瞬间,位置、速度和方向状态可以通过世界坐标系中时间间隔[tk, tk+1]内的惯性测量传播:

可以看出,IMU 状态传播需要帧 bk 的旋转、位置和速度。当这些起始状态发生变化时,我们需要反向传播 IMU 测量值。特别是在基于优化的算法中,每次我们调整姿势时,我们需要在它们之间反向传播 IMU 测量值。这种传播策略在计算上要求很高。为了避免反向传播,我们采用了预积分算法。在将参考帧从世界帧更改为局部帧bk后,我们只能预先集成与线性加速度^a和角度速度^ω相关的部分,如下所示:
 其实IMU积分和IMU预积分都可以当作相邻图像帧之间的约束,区别在于,IMU积分公式中包含了IMU在世界坐标系下的位姿,这就导致了当每次图像帧对应的IMU位姿调整时,预测下一图像帧对应的 IMU位姿只能再次进行积分。而IMU预积分公式中的位姿变化只是相对于上一图像帧对应的IMU位姿的变化量,实际计算时用不到IMU在世界坐标系下的位姿,这样每当IMU位姿调整后,只需在此基础上加上一个预积分量就能得到下一帧位姿。
其实IMU积分和IMU预积分都可以当作相邻图像帧之间的约束,区别在于,IMU积分公式中包含了IMU在世界坐标系下的位姿,这就导致了当每次图像帧对应的IMU位姿调整时,预测下一图像帧对应的 IMU位姿只能再次进行积分。而IMU预积分公式中的位姿变化只是相对于上一图像帧对应的IMU位姿的变化量,实际计算时用不到IMU在世界坐标系下的位姿,这样每当IMU位姿调整后,只需在此基础上加上一个预积分量就能得到下一帧位姿。
预积分的计算也很巧妙,只需要在IMU积分的等式两边左乘一个由世界系到IMU系的旋转矩阵即可。
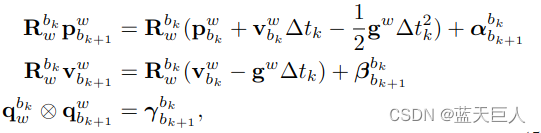
然而,其中,α \alphaα、β \betaβ、γ \gammaγ就是IMU的预积分量。具体形式如下:

IMU预积分只与IMU测量值有关,其实IMU预积分就是将相邻两图像帧之间的IMU数据积分起来,以此作为约束来限制相邻图像帧的位姿调整。
离散时间的预积分:
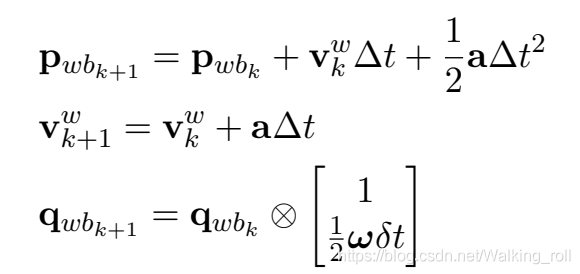
从上面的分析我们知道预积分就是把一段时间的IMU数据积分起来。而我们的SLAM系统是以离散时间的形式向后端发送IMU数据,所以我们要用到IMU运动模型的离散时间积分。离散时间δt 的状态变化量如下式计算。
在实际应用中有两种方法计算。
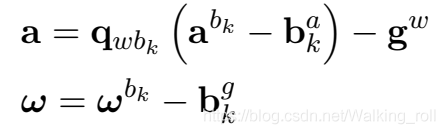
①用第k时刻的测量值来计算两个相邻时刻 k 到 k+1 的位姿,即:
②用两个时刻的测量值 a, ω 的平均值来计算两个相邻时刻 k 到 k+1 的位姿,即:
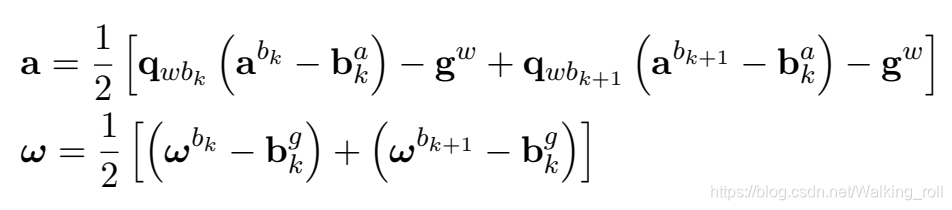
第①种方法叫做欧拉法,第②种方法叫做中值法。
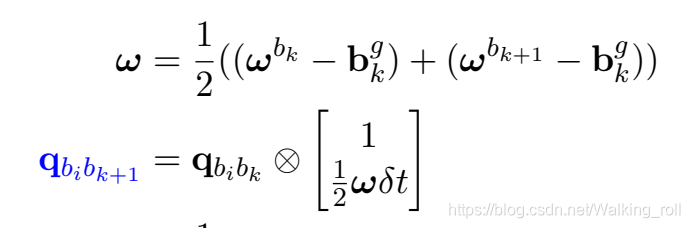
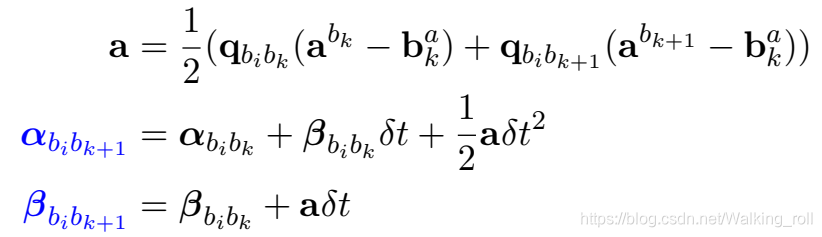
VINS-mono中采用的中值积分的方法来计算IMU的预积分:
-
相关阅读:
csp-j
An工具介绍之摄像头
ElasticSearch(三)
数值变化跳动效果
【监听服务器】自动重启脚本
QGIS编译(跨平台编译)之五十七:qgis_app库在Qt Creator环境下编译的错误处理
Letcode-Top 100动态规划
【vue3组件封装】Form和FormItem表单
TS(TypeScript)和axios实现VUE请求重试
【LeetCode】187. 重复的DNA序列
- 原文地址:https://blog.csdn.net/qq_44632658/article/details/131119743