-
ADAS/AD笔记之特斯拉Autopilot-HW3.0系统
摘要:
目前国内一般直接将高速NOA成为“L2+”;因此,复杂度更高的城区NOA,就自然的映射到了“L2++”。
一、概述:
特斯拉Autopilot系统首创了NOA这种淡化脱手/脱眼/脱脑(驾驶自动化程度)逻辑的功能,致力于与导航结合后,完成从A点到B点的全程进行辅助驾驶(L2,不脱手)的能力,功能实用性大大增加。
鉴于ICA、LCC这种功能也是L2,为了体现特斯拉NOA良好的高速和城区的变道、匝道汇入汇出、复杂场景通行能力,用“L2+”来形容特斯拉NOA的先进性,也是被行业接受的。但是这个L2+,并不是在脱手/脱眼/脱脑这个维度体现的。
补:一般L几与XXX-off的对应关系是
-
无L,没有智驾功能;
-
L0,无控制(只报警提醒、提示),Warning;
-
L1,单向控制(纵向,或横向),Single-direction control;
-
L2,横纵向控制,不脱手,Hands-on;【横纵向都具备后,就开始拼是否脱手/脱眼/脱脑了】
-
L2+,横纵向控制,脱手,Hands-off;
-
L3,横纵向控制,脱眼,Eyes-off;
-
L4,横纵向控制,脱脑,Minds-off;
-
L5,横纵向控制,无人,Driver-off;车辆不再为驾驶员提供底盘控制接口(如制动踏板、油门踏板、方向盘等人类直接控制车辆的装置);
另,国内也有不少厂商习惯用场景复杂度来定义功能。目前国内一般直接将高速NOA成为“L2+”;因此,复杂度更高的城区NOA,就自然的映射到了“L2++”。
二、系统介绍:
根据相关信息,对基于HW3.0的Autopilot系统方案统计如下:【注:特斯拉OTA很快,信息经常变,只能大致参考下】
Item Description Comment 功能:SAE驾驶自动化程度 “L2++”级 高速、城区、停车场等多场景通行/变道能力很强 功能:驾驶自动化程度描述 不脱手 EAP脱手间隔与车速相关;
车速在60-80kph时候,约45s-65s之间;
低速最长时间可达3分钟;功能:功能描述 NOA 基于导航的辅助驾驶 功能:车速区间 0-130kph; 全速域 功能:电子围栏 EAP:高速NOA;
FSD:城区NOA;HW3.0的主要价值在于FSD功能特斯拉能力的体现,主要在电子围栏指标上。场景泛化能力很强,功能开启后的通行能力也很强 功能:变道约束 支持变道 细分场景方面:汇入、汇出、匝道同行等 功能:路口通行 支持十字路口通行 高速和城区,最大的区别有两个:路口通行,以及VRU的处理。FSD的路口的通行能力很强;典型能力:无保护左转、高速车流的汇入 功能:DDT后援任务用户有效性 需要驾驶员随时接管 功能:环境条件 不支持下雨下雪等恶劣天气; 无车道线时,可利用路沿检测保证车辆正常行驶(而不退出); 功能:前置条件 ICA(或叫LCC)已开启; 满足条件后,系统通过HMI提示用户可以开启NOA功能,用户确认后进入NOA功能 功能:感知系统(OEDR) 8V 传感器布置位置见图1所示 功能:接管(Takeover) 需要驾驶员随时接管车辆; 功能:降级(Degradation) 未知 功能:MRM 未知 功能:HMI a. 系统入口:方向盘按键;
b. 状态提示:仪表(如果有)+中控屏提示 + 蜂鸣声+语音提醒;功能:DSSAD 未知 功能:OTA 支持 功能:操作系统 Safety Linux 功能:数据上传(及车端触发器) 支持 功能:其他 系统:系统类型 集中式系统 特斯拉为中央&区集中式EEA;
智驾系统ECU为HW3.0域控,集中式计算系统:智能传感器种类与数量 无 集中式计算,无分布式智能传感器 系统:控制器个数与种类 集中式系统,AutoPilot ECU with HW3.0;使用自家FSD SOC; 系统:软件服务-RTK 无 系统:软件服务-数字地图 无 依赖SD map给route,剩下的全交给视觉系统 系统:软件服务-车联网服务(V2C) 有,4G(LTE) 系统:软件服务-V2V&V2I服务 无 系统:Fail Operational方案 无 系统:Fail Operational-电源 无 系统:Fail Operational-通信 无 系统:Fail Operational-制动系统 无 系统:Fail Operational-转向系统 无 系统:Fail Operational-计算&感知 SOC层面的部分冗余,非ECU层面 两个FSD SOC在某些功能&算法上,进行冗余; 系统:其他 传感器:摄像头-前视主摄像头 有 AR0136/AR0138-1.2MP-RCCB-HFOV52° 传感器:摄像头-前视宽角摄像头 有 AR0136/AR0138-1.2MP-RCCB-HFOV120° 传感器:摄像头-前视窄角摄像头 有 AR0136/AR0138-1.2MP-RCCB-HFOV28° 传感器:摄像头-前视双目摄像头 无 传感器:摄像头-侧前摄像头(x2) 有 AR0136/AR0138-1.2MP-RCCB-HFOV90° 传感器:摄像头-侧后摄像头(x2) 有 AR0136/AR0138-1.2MP-RCCB-HFOV80° 传感器:摄像头-后视摄像头 无 传感器:摄像头-环视摄像头(x4) 有,只有一个后鱼眼摄像头 OV10635-1MP-RGGB-HFOV140° 传感器:Radar-前向主雷达 有,后又取消 基于纯视觉。HW4.0预计会重新安装4D radar 传感器:Radar-侧前角雷达(x2) 无 传感器:Radar-侧后角雷达(x2) 无 传感器:Radar-后向雷达 无 传感器:Lidar-前向主Lidar 无 传感器:Lidar-侧前角Lidar(x2) 无 传感器:Lidar-侧向补盲Lidar(x2) 无 传感器:超声波传感器(x12) 有,后续会取消 基于视觉的占用网络算法来替代 传感器:IMU 有 传感器:GNSS 有 传感器:地面湿度传感器 无 传感器:DMS摄像头 有 安装位置较为少见,单颗camera应该可以兼顾DMS+OMS的作用; 传感器:后风挡麦克风 无 传感器:地面湿度传感器 无 传感器:其他 主控制器:控制器描述 HW3.0,双SOC + MCU方案 主控制器:散热方式 液冷 主控制器:功耗 >72W 主控制器:MPU1子系统-MPU型号 FSD chip 主控制器:MPU1子系统-MPU数量 2个 主控制器:MPU1子系统-MPU内存规格 LPDDR4 主控制器:MPU1子系统-MPU内存容量 1GB 主控制器:MPU1子系统-MPU内存数量 8个,一个SOC接4个 主控制器:MPU1子系统-MPU存储规格 UFS 主控制器:MPU1子系统-MPU存储容量 32GB 主控制器:MPU1子系统-MPU存储数量 2个,一个SOC接一个 主控制器:MPU2子系统-MPU型号 无 主控制器:MPU2子系统-MPU数量 无 主控制器:MPU2子系统-MPU内存规格 无 主控制器:MPU2子系统-MPU内存容量 无 主控制器:MPU2子系统-MPU内存数量 无 主控制器:MPU2子系统-MPU存储规格 无 主控制器:MPU2子系统-MPU存储容量 无 主控制器:MPU2子系统-MPU存储数量 无 主控制器:MCU子系统-MCU型号 TC297 主控制器:MCU子系统-Flash型号 未知 主控制器:MCU子系统-Flash容量 300MB 主控制器:片间通信-PCIe Switch型号 无 主控制器:片间通信-Ethernet Switch型号 Marvell 88EA 6321 主控制器:其他 冗余控制器 无 其中,针对上表中的图例,附在下方:
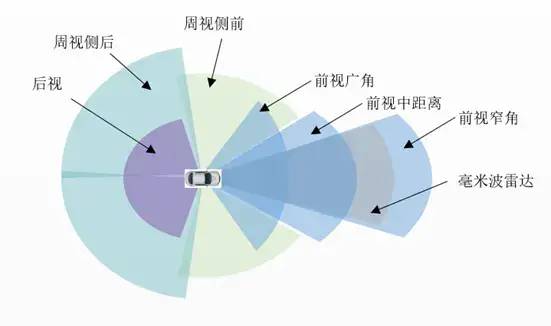
图1 传感器安装位置和FOV视角
三、部署车型和地区:
Vehicle Type Region Geo-fencing Comment Model S/3/X/Y 北美 城区;V11后统一了高速和城区道路,形成全场景FSD 选装价格:15000美元;
或 订阅价格:199美元/月四、总结:
按照上述维度评价Autopilot HW3.0不太适合。特斯拉主要是在算法上进展很快。从HW2.0/2.5升级到HW3.0以后,带来的FSD算法方案,应用了很多新AI技术,比如BEV多摄感知方案 + learning based 规控 + 4D标注等;目前又增加了占用网络技术,提升一般静态障碍物的检测能力。迭代速度很快。期待特斯拉在算法领域的持续创新。
另外,需要关注Camera-only系统的状态,是否能根据vision only系统迭代出L3级以上智驾系统。目前常见的说法,比如“人是靠视觉感知世界的,所以视觉系统理论上靠算法迭代也能做到自动驾驶”这类“朴素”的价值判断,并不太能让人信服。因为如果按照这种价值判断去“比喻”工程实践的话,人类就不需要仿生学了。具体地,飞机现在应该都是扇动翅膀的扑翼机,而不是固定翼飞机。因此,需要时刻关注算法创新的进展(这个才是能够证明可行的原因),以及特斯拉对其他传感器的增减尝试。但是,从整车层面看,如果vision only系统能够实现L3,那对智驾系统的推广,是极其有利的。
反过来看,基于4D radar或Lidar等主动性传感器为主的智驾系统(比如1V-5R-1L这种系统,可以保留前向视觉传感器),实现L2+和L3的可能性较小。奔驰的Drive Pilot系统的L3功能(TJP),目前是单车道场景,还可以handle,一旦涉及到频繁变道,比较担心基于Radar/Lidar等主动性传感器的能力(反过来说,也很期待以售卖4D Radar + Lidar部件的厂商,尽快能够推出基于Radar/Lidar为主传感器的高端智驾系统,来证明该技术路线的是可行的)。
来源 | 智能驾驶与人形机器人
-
-
相关阅读:
【牛客面试必刷TOP101】Day8.BM33 二叉树的镜像和BM36 判断是不是平衡二叉树
springboot教室实验室预约系统在线视频点播系统毕业设计毕设作品开题报告开题答辩PPT
OD_2024_C卷_200分_7、5G网络建设【JAVA】【最小生成树】
前端构建效率优化之路
VUE3脚手架工具cli配置搭建及创建VUE工程
CUDA Programming Model--CUDA编程模型
Unity + Mirror实现原创卡牌游戏局域网联机
oak深度相机入门教程-人物跟踪
mac jupyter使用现有的python环境
pyhton枚举列表对象
- 原文地址:https://blog.csdn.net/yessunday/article/details/130491304