-
嵌入式开发--RS-485通讯的问题
RS-485说明
RS-485一般简称485总线,是最常用的工业总线之一,一般采用2线的半双工模式,用差分方式收发信息。最高速度可达10M BPS。
接口芯片
单片机使用485总线时,是用UART或USART接口,通过RS-485收发器完成信号的输入和输出。常用的芯片有MAX485,MAX3485,SP3485等等。
硬件连接
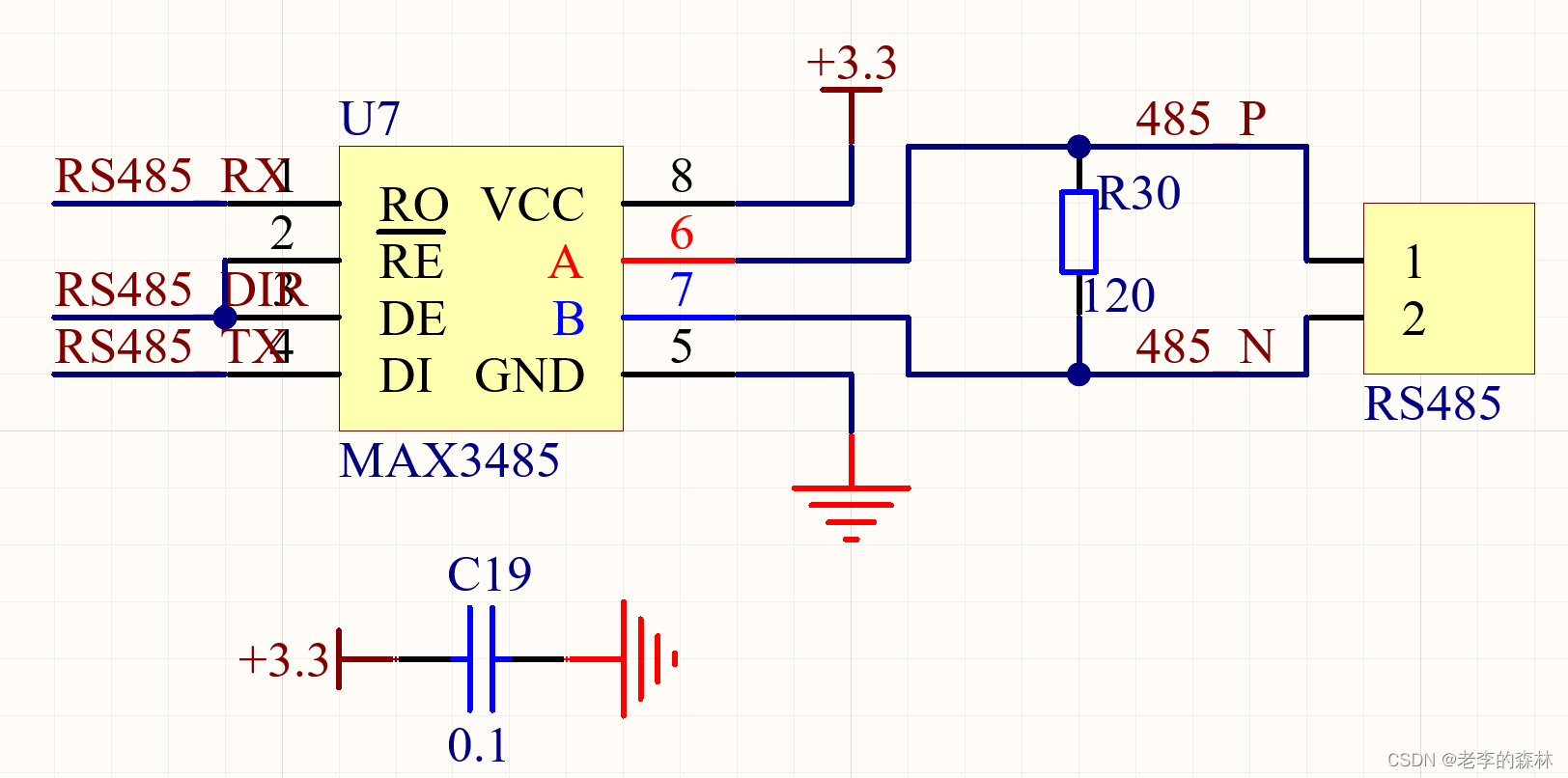
硬件很简单,RO和DI连接到单片机的UART接口,是数据的收发引脚,RE和DE连通,接到单片机的GPIO,以控制数据流的方向,是输入还是输出。CubeMX设置
CubeMX教程见这里:嵌入式开发–CubeMX使用入门教程
连接到UART2,具体设置如下:

这些参数需要根据你的设置要求进行,异步模式,波特率,位数,奇偶校验,停止位,其他默认即可。开启中断,以方便接收数据。

UART对波特率要求并不高,误差5%以内即可,所以晶振可以用片内的RC振荡器,当然更建议用外部石英晶振,频率更准,更重要的是可靠性高。代码编写
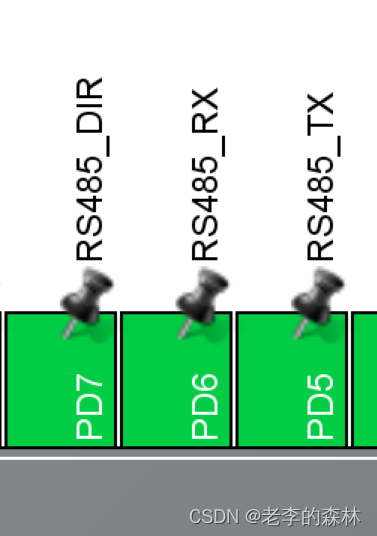
引脚定义
#define MAX485_OUT() HAL_GPIO_WritePin(CTL_485_PORT,CTL_485_PIN, GPIO_PIN_SET) #define MAX485_IN() HAL_GPIO_WritePin(CTL_485_PORT,CTL_485_PIN, GPIO_PIN_RESET)- 1
- 2
使能串口
HAL_UART_Receive_IT(&huart2, uart2_state_typedef.data, 1); //开启串口,接收到的数据放到uart2_state_typedef.data,每次接收1个字节 __HAL_UART_ENABLE_IT(&huart2, UART_IT_RXNE); //启动RXNE中断 __HAL_UART_ENABLE_IT(&huart2, UART_IT_IDLE); //启动IDLE中断- 1
- 2
- 3
RXNE中断是用来接收数据, 每次接收1个字节,并且在中断中再次开启这个中断
IDLE是用来做帧结束判断的,485每帧8个字节,总线空闲后会产生一个IDLE中断,进了这个中断,就表示一帧结束。中断函数
void USART2_IRQHandler(void) { /* USER CODE BEGIN USART2_IRQn 0 */ /* USER CODE END USART2_IRQn 0 */ HAL_UART_IRQHandler(&huart2); /* USER CODE BEGIN USART2_IRQn 1 */ //RS485接口 //收到1个字节的数据 if(__HAL_UART_GET_FLAG(&huart2, UART_FLAG_RXNE)) { __HAL_UART_ENABLE_IT(&huart2, UART_IT_RXNE); //启动RXNE中断 uart2_state_typedef.data[uart2_state_typedef.len] = huart2.Instance->RDR; uart2_state_typedef.len++; } //总线空闲时,会发生一次IDLE中断,此时意味着数据接收完成 //不同的内核,清除IDLEIE的方式不同,请查阅手册 if(__HAL_UART_GET_FLAG(&huart2, UART_FLAG_IDLE)) { huart2.Instance->ICR |= USART_ICR_IDLECF; //向USART_CR1的IDLECF位写1,以清除IDLEIF标志,否则会一直进IDLEIE中断 } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
发送数据
void modbus_send(void) //发送数据到串口,数据需要事先在modbus_send_array中准备好 { MAX485_OUT(); //转换为输出模式 delay_us(100); //延时,以等待接口芯片切换完成 HAL_UART_Transmit(MODBUS_PORT, modbus_send_array,8, 100); //从串口2发送数组命令 MAX485_IN(); //转换为输入模式 delay_us(10); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
接收数据
u8 modbus_receive(u16 timeout) //发送指令后,读取伺服回传的数据,超时单位为ms { u8 ret = 255; u8 i = 0; while(1) { HAL_Delay(1); i++; if(i>timeout) break; if(uart2_state_typedef.state == UART_RECEIVE_OK) { uart2_state_typedef.state = 0; ret = 0; huart2.Instance->ICR |= (USART_ICR_EOBCF|USART_ICR_TCCF|USART_ICR_FECF|USART_ICR_PECF);//eobf txe tc fe pe return ret; break; } } return ret; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
如此便可以发送和接收了。
有一个问题,多收了一个数
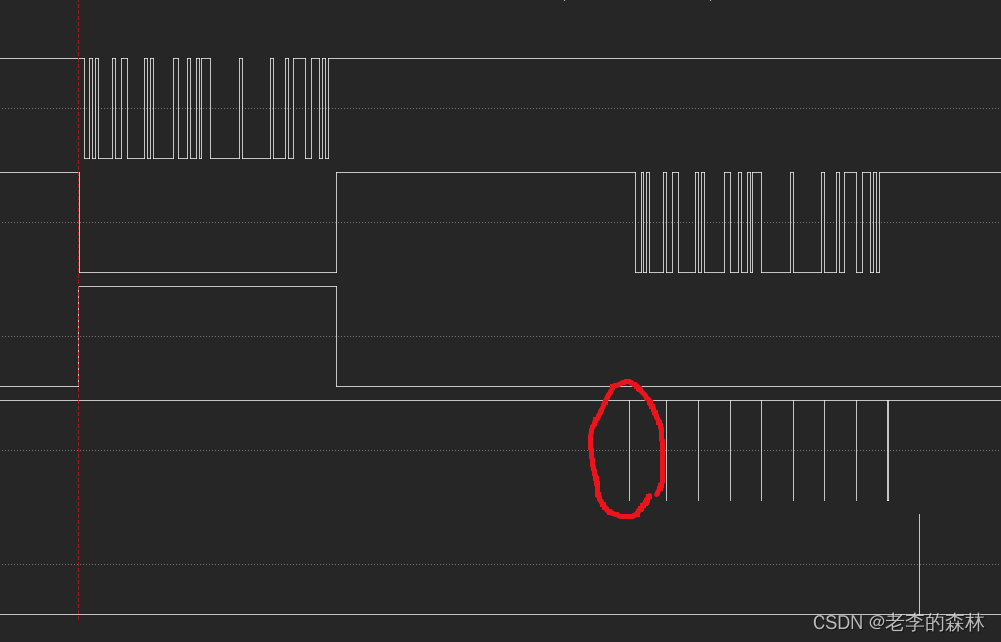
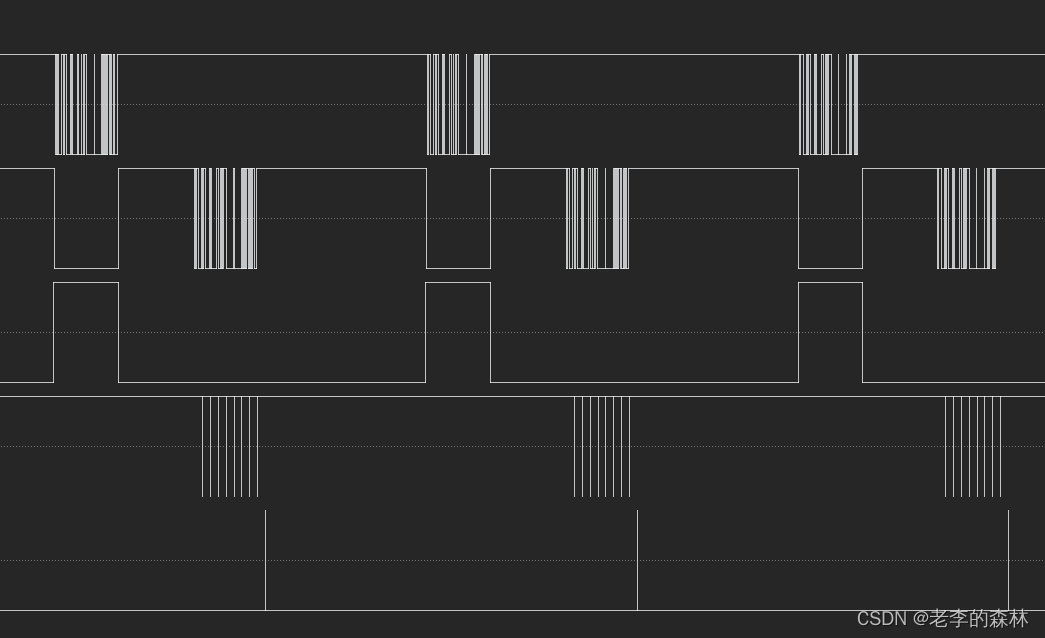
于是在串口中断内,数据接收,和IDLE处,分别触发了一个电平信号,以便观察。如下图:
数据线上的波形
第1行的波形是发送引脚
第2行的波形是接收引脚
第3行的波形是方向控制引脚
第4行是接收中断,进一次就有一个脉冲
第5行是IDLE中断,进一次就有一个脉冲。

下图是放大的,一帧数据的波形

注意红圈的这个脉冲,数据还没有开始接收,却已经进中断开始接收了一次数据,这也就是额外多出来的一个接收字符。
问题分析
这个脉冲是发生的位置,是在数据发送完成,并且485的方向切换到接收之后5ms处,显然是在那时,又进了一次RXNE中断,进中断的原因也很简单,在因为下图这个低电平跳变。
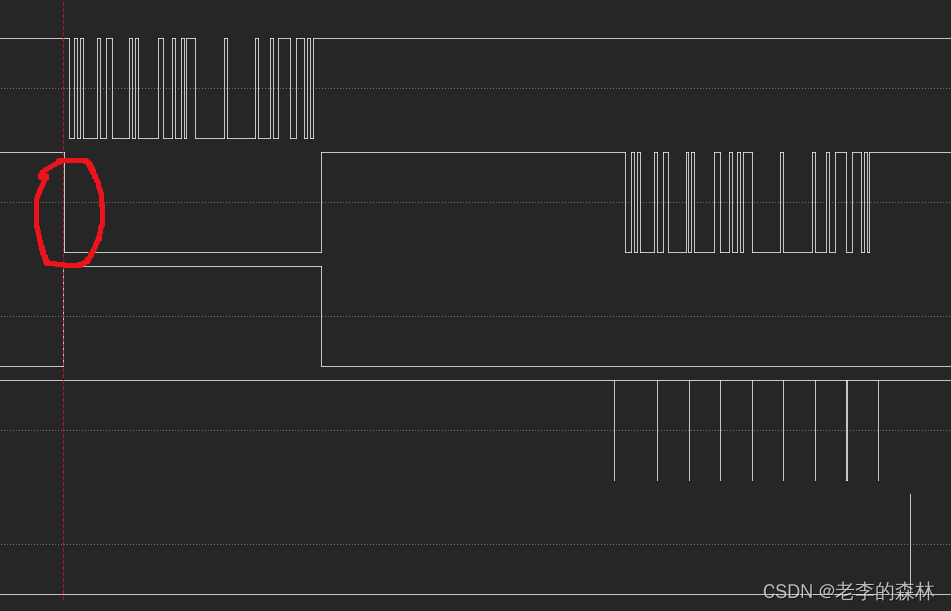
也就是说,当485的数据方向从接收变为发送以后,接收端口会检测到一个低电平,这被认为是串口接收数据的起始位,但是后续没有一个高电平的结束位,所以收到的这个数据肯定是错误的,UART2的ISR寄存器FE位也指出了这一点,如下图

问题解决
知道了问题,也就知道了如何解决,将发送函数略做修改,发送完成后,清一下ISR寄存器的RXNE标识问题解决
void modbus_send(void) //发送读寄存器的指令到串口 { u32 i=0; HAL_UART_AbortReceive_IT(&huart2); __HAL_UART_DISABLE_IT(&huart2, UART_IT_RXNE); //禁用RXNE中断 MAX485_OUT(); delay_us(100); HAL_UART_Transmit(MODBUS_PORT, modbus_send_array,8, 100); //从串口2发送数组命令 huart2.Instance->RQR |= USART_RQR_RXFRQ; //清除485方向切换导致的RXNE标识 huart2.Instance->ICR |= USART_ICR_IDLECF; //清除空闲标识 huart2.Instance->ICR |= USART_ICR_TCCF; //清除发送完成标识 __HAL_UART_ENABLE_IT(&huart2, UART_IT_RXNE); //启动RXNE中断 MAX485_IN(); uart2_state_typedef.len = 0; uart2_state_typedef.state = UART_READY; delay_us(10); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23

进了8次接收中断,接收8个字符,进一次IDLE中断,表示这一帧结束,工作正常。 -
相关阅读:
Bridge 模式
我赢助手小技巧:学会这三招,爆款内容视频完播率提高50%(上)
麻了,一个操作把MySQL主从复制整崩了
rpy2: Unable to determine R library path:
C++ 读取txt文件,按行读取,每行按照空格分隔
C++——虚函数、虚析构函数、纯虚函数、抽象类
内网穿透的应用-不再依赖iCloud!利用群晖生态,自己掌控本地SSD的云存储!
Reinforcement Learning 强化学习(三)
分类预测 | Matlab实现WOA-GRU鲸鱼算法优化门控循环单元的数据多输入分类预测
使用VMware虚拟机安装Red Hat Enterprise Linux8/9教程
- 原文地址:https://blog.csdn.net/13011803189/article/details/128206077