-
自动驾驶:2022 apollo day 观后感(一)
注: ppt来自apollo day,结合ppt,讲述一些自己的想法,欢迎批评指正!
Topic One – 打造安全、智能、高效的自动驾驶技术体系(陈竞凯)
无人驾驶技术架构设计
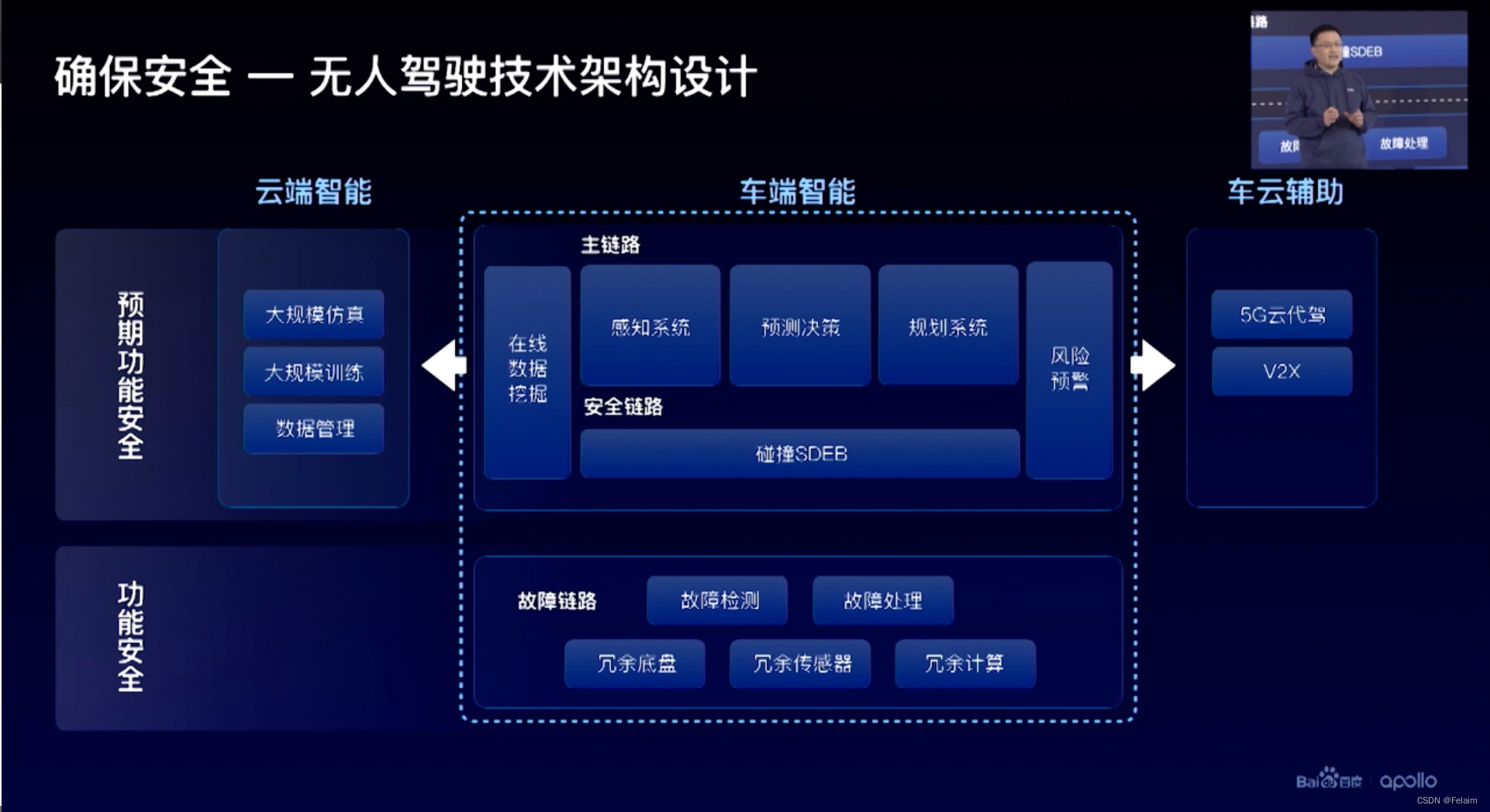
自动驾驶系统最重要的是什么?是安全。自动驾驶存在的意义是什么,其实就是挽救生命,解放时间。在自动驾驶中,是不会有酒驾,药驾和疲劳驾驶的,这样就可以减少每年因为车祸导致家庭破碎的情况。同样如果在北上广深,那么停车难、贵的问题也是很严重的,如果有自动驾驶,就可以减少驾驶员寻找车位的时间,这些都是需要推进自动驾驶技术的发展,才能解决的。所以自动驾驶存在并不是一味的炫技,而是一项可以颠覆人类出行方式的技术,但是这项技术的成熟还需要很长时间的优化迭代。
安全方面分为两个方面,一方面是功能安全,另一方面是预期功能安全。
功能安全是指确实是需要保证有一定的冗余,换句话说是需要有backup,在一个传感器掉线的情况下,怎样才能保证自动驾驶系统能够继续安全工作,这一点确实很重要。所以说确实是需要重要部件的冗余,在演讲中举了几个例子,如冗余底盘,冗余传感器,冗余计算等。其次,是还需要进行故障的检测和处理,是需要自动驾驶系统需要检测出不同的软件、硬件的故障,然后进行智能化的处理。在复杂的道路的条件下,故障处理策略需要兼容不同的情况,不能简单的一停了之。同时自动驾驶系统需要判断自车是否处在设定的ODD范围之内,如果不在,那么应该及时退出自动驾驶系统。演讲中也说是一个偏向召回的策略,那么总体考量也是侧重在安全方面进行考虑。
仿真和路测也是会很重要,虽然会损耗一些效率,但是主要方向还是得保证安全。
自动驾驶AI技术体系
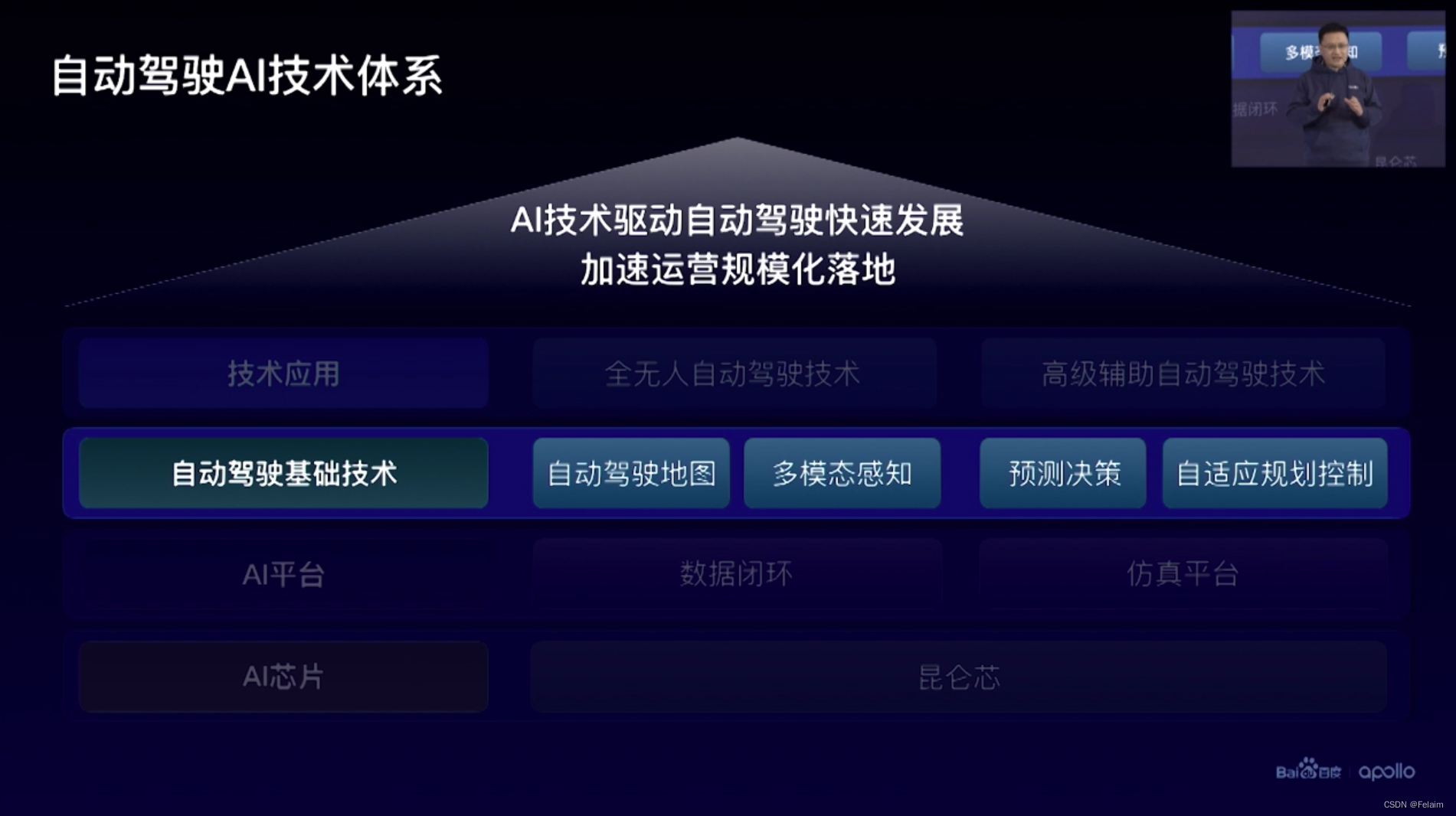
自动驾驶AI技术体系主要分为两派,技术派和工程派。技术派主要支持的是end2end的方案,但是会存在不确定性,现在来说深度学习还是一个黑盒方案,如果训练一个模型,这个模型具体的效果是否能完全cover路上的问题还是不确定的,并且每次模型的更新也许会引入新的问题。工程化其实还是比较明确的,遇到一个问题,通过对应的策略是可以解决的,但是又会出现另外一个问题,就是道路环境,交通规则这些都会比较复杂,针对不同的道路,需要给出不同的策略,这种策略会很繁重,这样代码的迭代,维护都需要大量的人力来做开发。
车载系统主要分为四个部分:
地图系统:自动驾驶系统不能脱离地图,不能脱离规则的约束。离线系统,在线系统(地图质量存在差异),更新率,实时性?
感知系统:数据+模型,传感器的配置存在分歧。充分发挥不同传感器的能力,后融合的方案转向前融合的方案。
预测决策系统:可以引入人类判断的节点。预测是引入自标注的学习系统,但是在实际行车过程中,预测和决策是一体的。
自适应规划控制:优化问题仿真系统:存在驾驶风格不同
算力支持:昆仑芯?
学习型PNC系统是实现全无人的必由之路
- 策略分叉:投入产出比迅速下降
- 城市扩展,需要调整策略:根节点的策略调整,难以迁移和维护。

预测和决策的多任务系统:基于搜索和推荐的技术应用到自动驾驶系统中,基于搜索的方法给出轨迹的候选。
仿真,高效迭代的利器

评测系统
障碍物交互数据是仿真的灵魂

场景库的构建,维度的切分。
急刹,cutin怎么取评价呢补充信息:
- 什么是ODD?
ODD 的全称是 Operational Design Domain(设计运行域)。 所谓自动驾驶汽车的 ODD 就是指自动驾驶系统功能设定的运行条件,包括但不限于环境、地理和时段限制、交通流量及道路特征等。
道路条件:高速公路(机动车专用公路)、普通公路、土路,或自动驾驶车的专用车道等,这些都是行驶的道路条件,还包括道路的具体性质:坡度、倾斜度、弯道曲率,是否有施工区域等。
地理条件: 城市或山区,靠海或内陆,山地或平原等,以及虚拟的地理围栏等。 地理围栏,就是通过事前设定好让自动驾驶车行驶的范围,通常是一个已验证的、适合自动驾驶车行驶的环境。
环境条件:天气、日照、昼夜、风、雨、雷电、雪、雾等环境条件。比如大雨时或下雪时,会造成车载传感器(摄像头、激光雷达)失效。
还包括周围车流、行人、动物、建筑物等等。 其他条件 速度限制,交通灯等设施的有无,是否配有安全员,持续行驶时间,包括法律法规等其他条件。 由于现在的自动驾驶技术还处于发展阶段,无法保证自动驾驶车在任何天气条件下和任何道路环境中都可以安全行驶的。因此,要根据该系统的能力来提前设定好ODD,通过限制行驶环境和行驶方法 ,将有可能发生的事故防范于未然。
-
相关阅读:
划分成绩ABCD
海外代理IP如何找到靠谱的?
pdf怎么转换成jpg或png格式的图片?
1186. 删除一次得到子数组最大和;1711. 大餐计数;1834. 单线程 CPU
flutter系列之:UI layout简介
年过中年危机,如果我再年轻十岁我会每天花几小时这样学习Java
SAP:增强中用commit和wait up会导致操作异常
HTML+CSS篮球静态网页设计(web前端网页制作课作业)NBA杜兰特篮球运动网页
git强制提交本地分支覆盖掉远程分支
【Rust日报】2022-07-18 Rust 1.62.1 pre-release 测试
- 原文地址:https://blog.csdn.net/Felaim/article/details/128184151