-
SAR信号处理基础2——线性调频信号频谱与驻定相位原理
前面已经给出了线性调频信号的时域表达形式,并介绍了信号的实部、虚部、相位、频率等,本文介绍线性调频信号的频谱,以及推导线性调频信号时常用的驻定相位原理。计算信号的频谱,实际上就是对信号做傅里叶变换。即



驻定相位原理认为,对于一个时域快速变化的信号,除了导数为零的位置(驻留点)外,其余区域的正负面积几乎为0,可以相互抵消,最终函数的积分结果主要受驻留点区域的影响。
以下图所示的信号为例,假设慢时间信号U(t) 如上图所示,快时间信号cosVt 如下图所示,计算积分
 时,由于
时,由于 的正部分与负部分相互抵消,积分结果接近0,只有在驻留点处,由于相位变换率很小,相位值有很长时间的滞留,才使得积分结果不为0。
的正部分与负部分相互抵消,积分结果接近0,只有在驻留点处,由于相位变换率很小,相位值有很长时间的滞留,才使得积分结果不为0。
仍然以chirp信号为例,前面已经得到了驻留点为


- clear;clc;close all;
- Tr = 10e-6;
- Br = 60e6;
- Kr = Br/Tr;
- Fs = 66.666667e6;
- Ts = 1/Fs;
- N = 2048;
- N = floor(Fs*Tr/2)*2;
- tr = [-N/2:N/2-1]/Fs;
- fr = [-N/2:N/2-1]/N*Fs;
- %%
- st = (abs(tr)<Tr/2).*exp(j*pi*Kr*tr.^2);
- Sf = fft(st);
- figure,
- subplot(221), plot(fr*1e-6, real(Sf)), grid on,
- xlabel('time (us)');
- title('频谱实部')
- subplot(222), plot(fr*1e-6, imag(Sf)), grid on,
- xlabel('time (us)');
- title('频谱虚部')
- subplot(223), plot(fr*1e-6, abs(fftshift(Sf))), grid on,
- xlabel('frequency (MHz)');
- title('信号频谱');
- subplot(224), plot(fr*1e-6, unwrap((angle((Sf))))), grid on,
- xlabel('frequency (MHz)'); ylabel('phase (rad)')
- title('频谱相位');
程序运行的结果如下图所示。

可以看出:
- 频谱的实部和虚部具有与LFM信号相似的线性调频结构,与LFM不同的是,频谱存在π/4 的相位,且调频率符号发生了变化。
- 频谱的幅度也可以近似为一个rect函数,由于Fs>Br,所以幅度谱存在一个跳变。
- 频谱的相位与LFM信号的相位基本一致,也可以近似为一个关于频域的二次函数,说明LFM信号的频率与时间之间存在意义对应的线性关系。
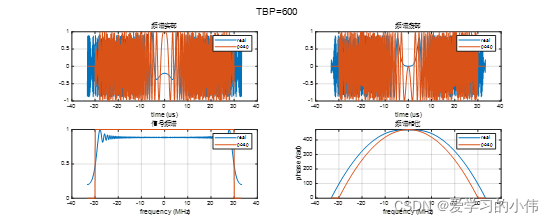
在计算LFM信号的频谱时,驻定相位原理得到的结果只是一种近似,但是这种近似在TBP>100时精度非常高,可以满足SAR成像处理的要求。下图给出了不同TBP下,LFM信号的频谱,其中蓝线是频谱的真实值,橙线为使用驻定相位原理计算的理论值。



-
相关阅读:
2019版本idea启动tomcat8.5版本控制台中文乱码
如何判断文档管理系统是否面向未来
uniapp的webview实现左滑返回上一个页面
关于推动可追溯代码来源的计划
又一个阿里云盘资源搜索引擎实现效果展示
普通人做自媒体怎么赚钱?
L2-021 点赞狂魔(Python3)
React 函数组件
Software caused connection abort: recv failed
C#实现十大经典排序算法:冒泡排序、选择排序、插入排序、希尔排序、归并排序、堆排序、计数排序、桶排序、基数排序
- 原文地址:https://blog.csdn.net/smyounger/article/details/122908967
