-
自动驾驶技术
高精地图(HD Maps):支持其他模块
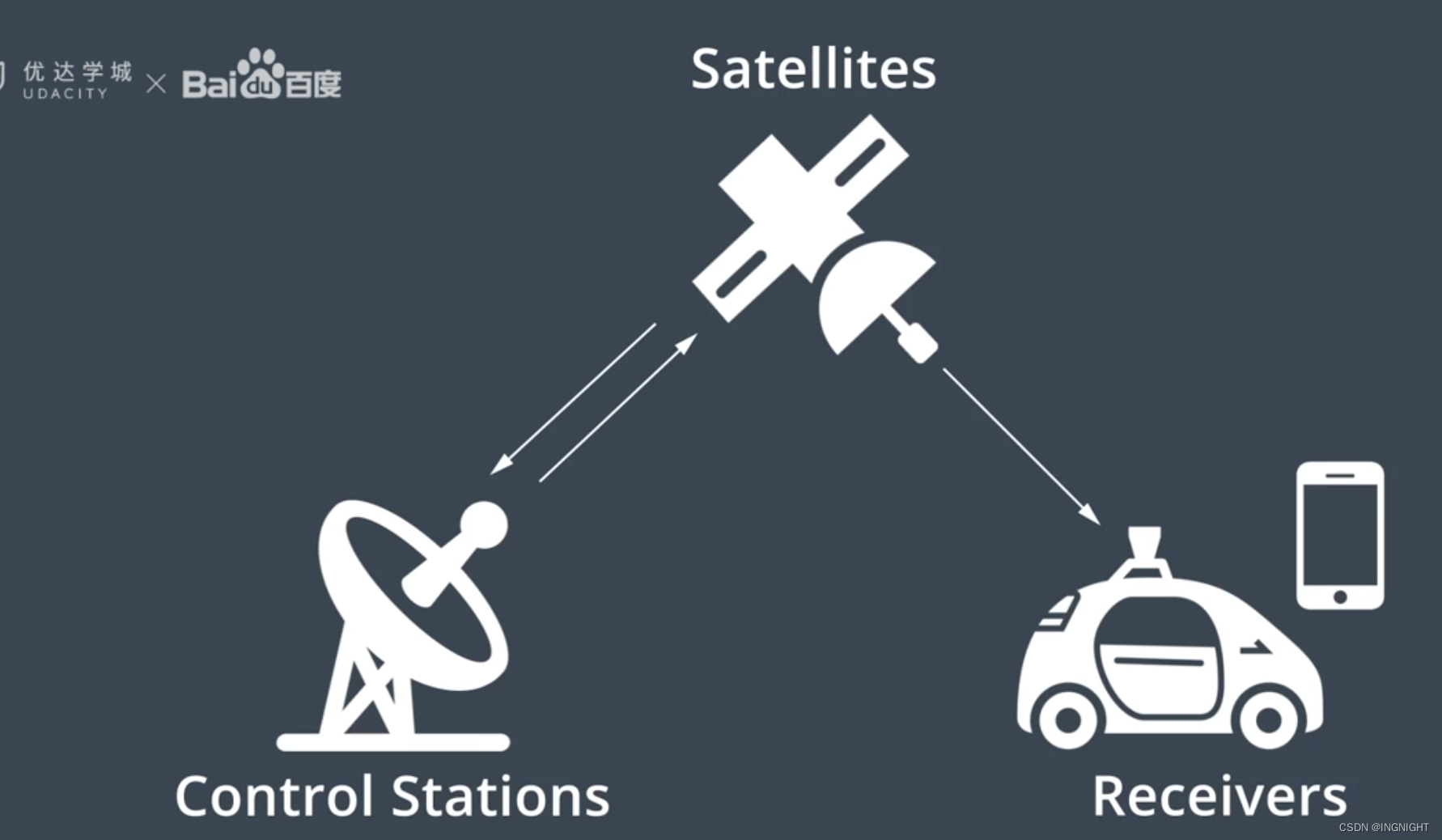
定位(Localization):讨论汽车如何确定他所处的位置,汽车利用激光和雷达数据,将这些传感器感知内容与高分辨地图进行对比,这种对比使得汽车能够以个位数厘米级精度进行定位。
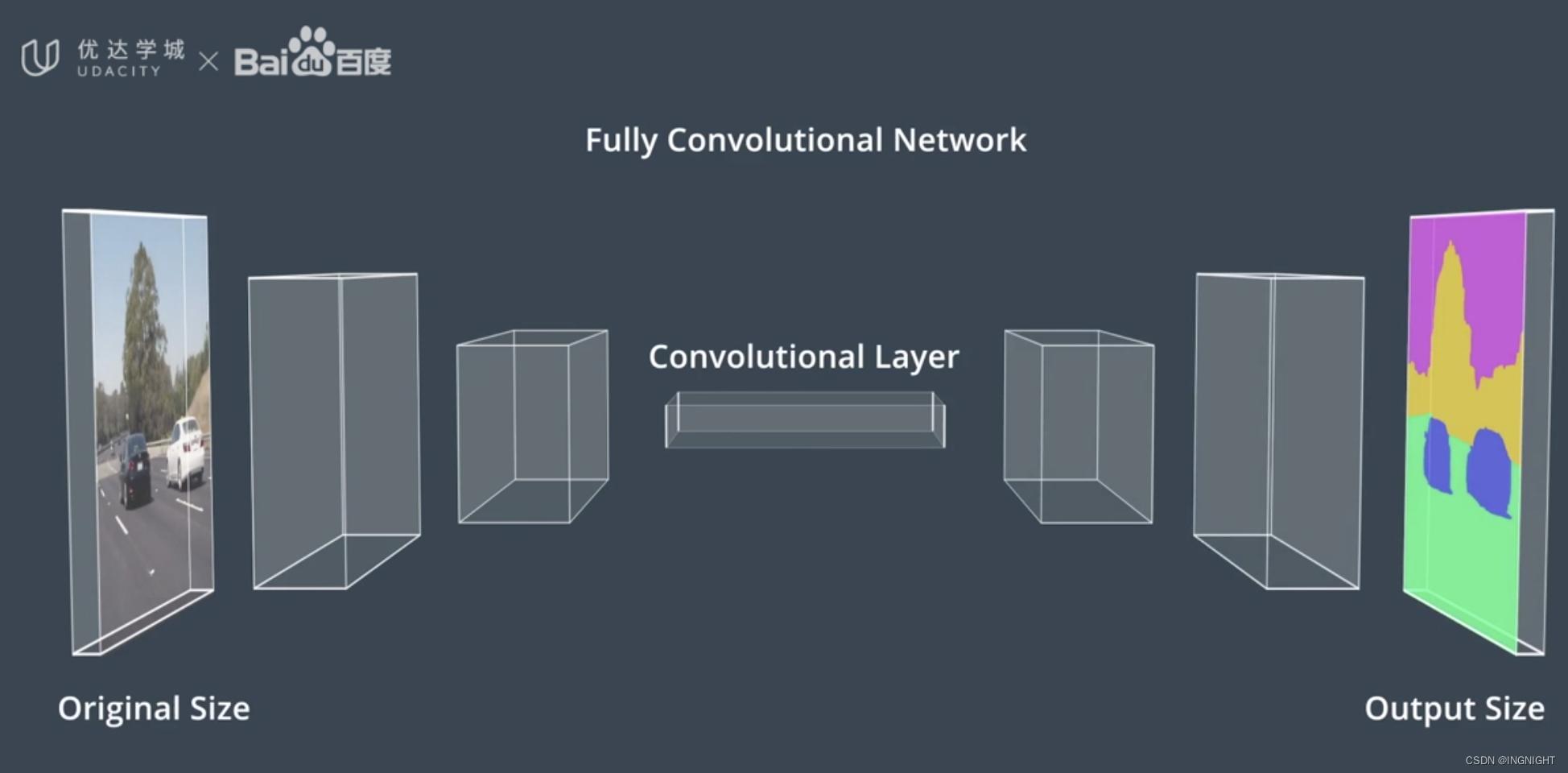
感知(perception):汽车如何感知世界,深度学习是一个重要且强有力的感知工具,卷积神经网络构成深度学习分支,对感知任务至关重要,如分类,检测和分割
这几种方法适用于几种不同无人驾驶车传感器的数据来源,包括摄像头,雷达和激光雷达
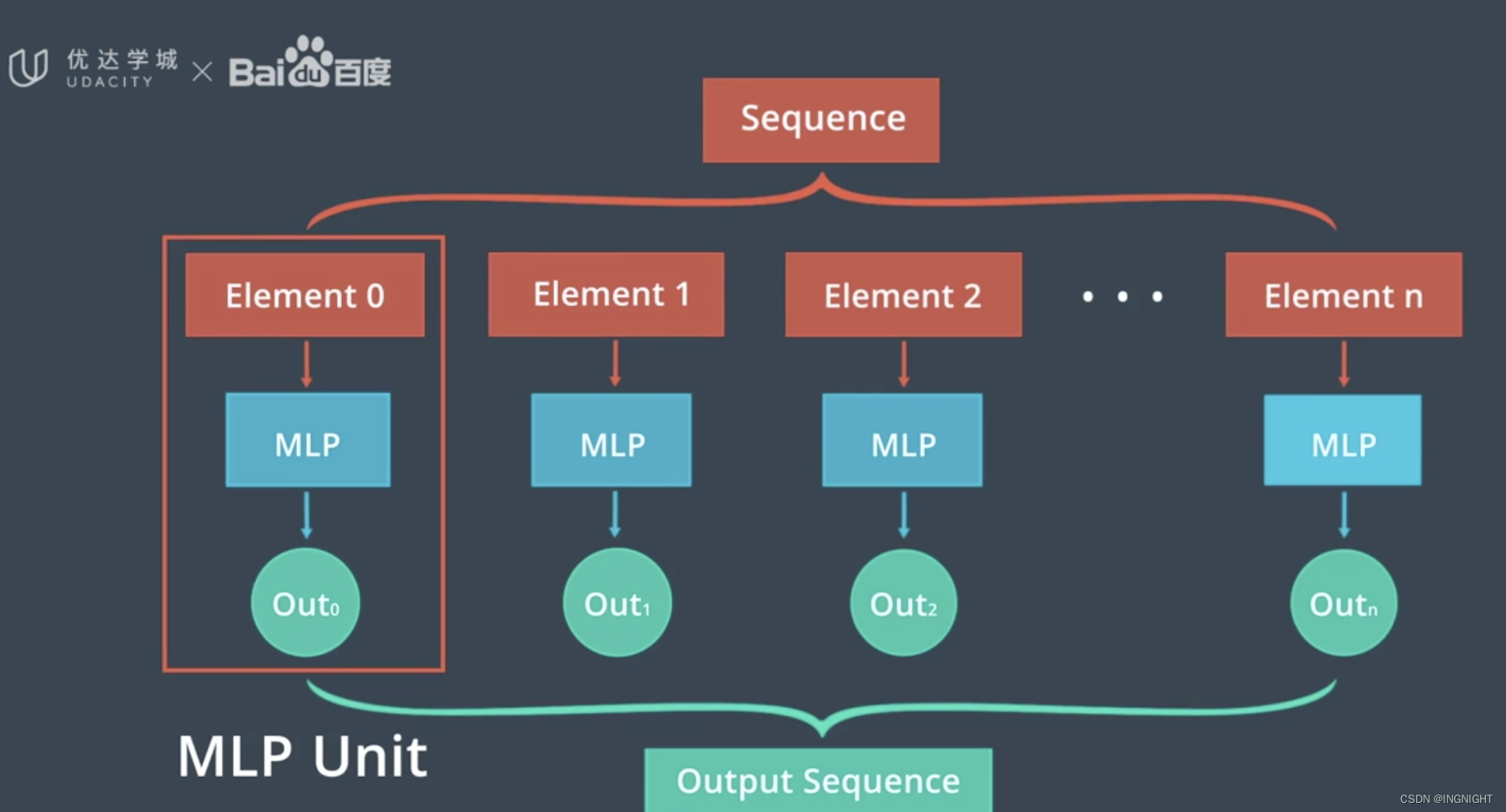
预测(prediction):预测其他车辆和行人如何移动。一种方法是递归式神经网络,可对其他物体随时间的运动进行移动,并使用时间序列预测未来
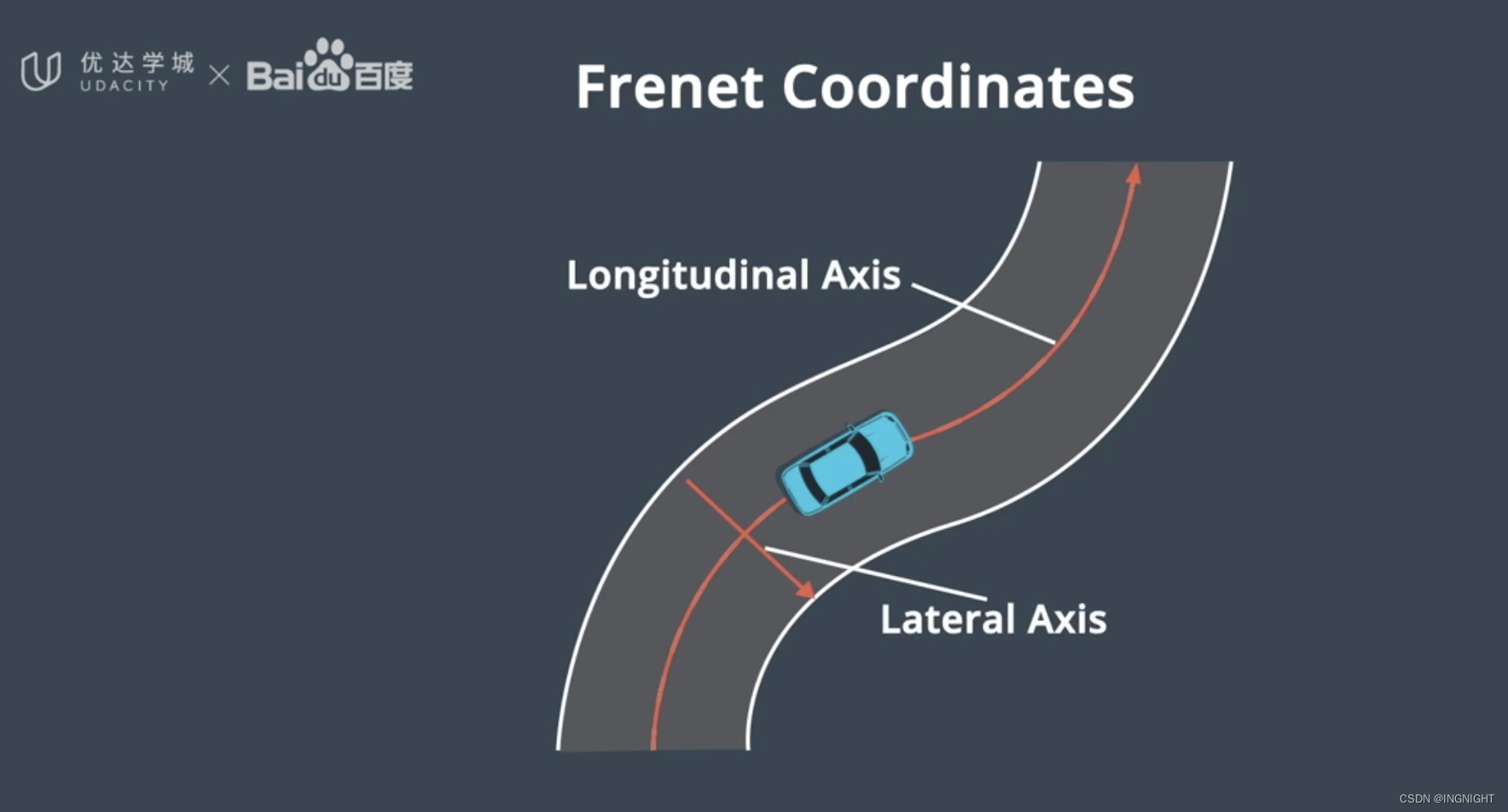
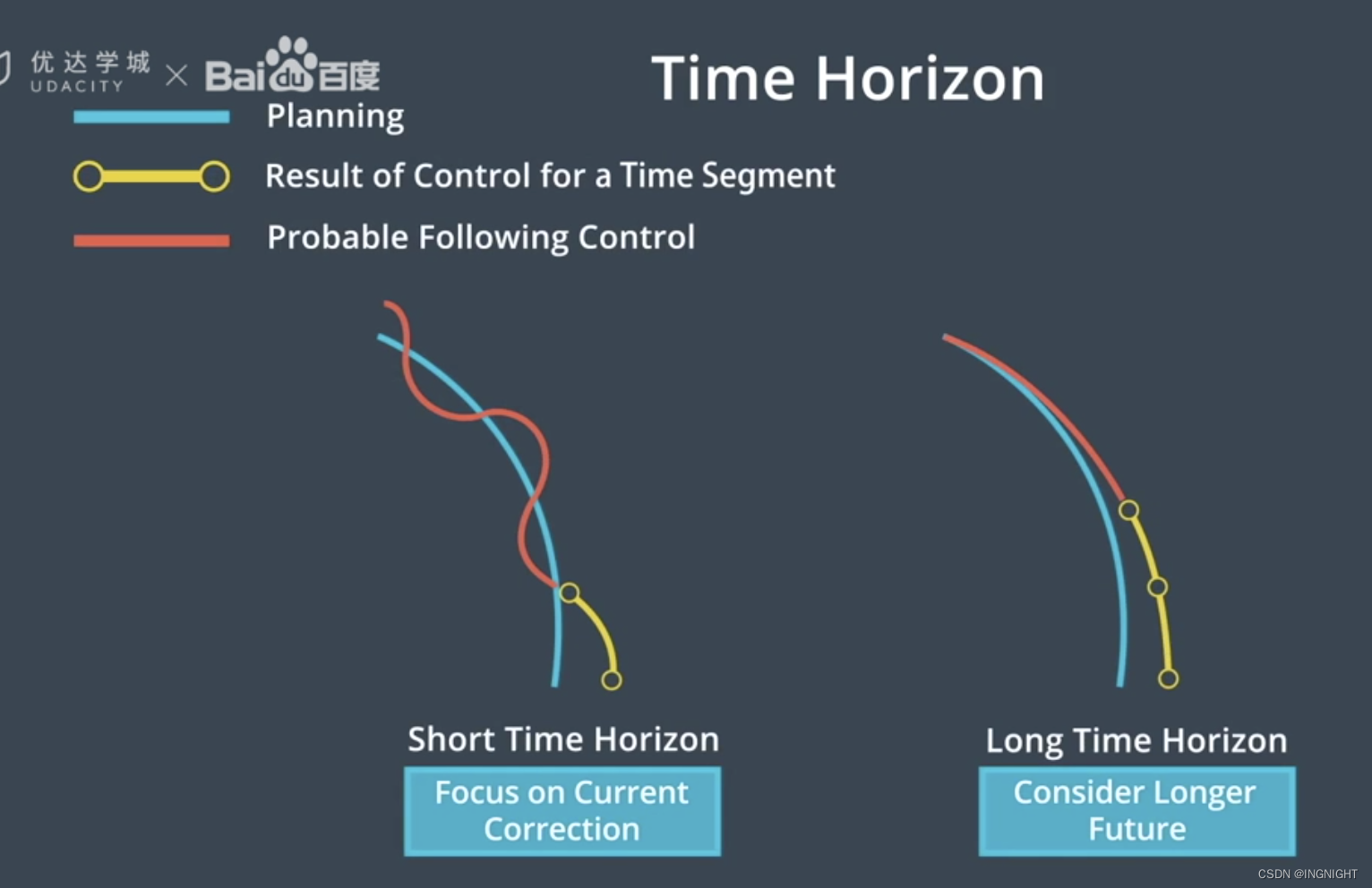
规划(planing):将预测和路线相结合以生成车辆轨迹,规划是构建无人驾驶车最困难部分之一
控制(control):如何使用转向,油门和制动来执行规划轨迹





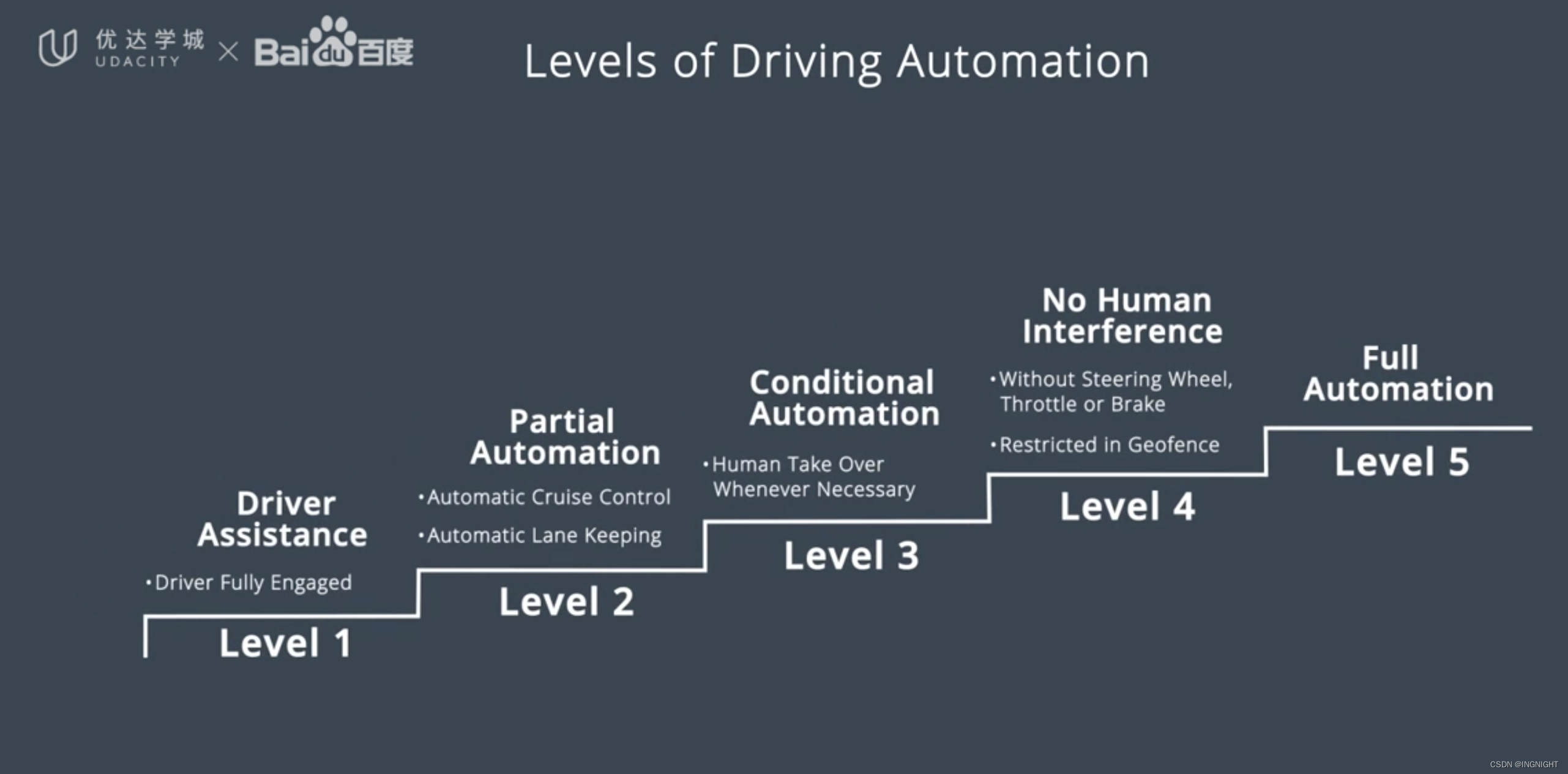
0 Level:是基本等级,驾驶员是系统的唯一据测者。驾驶员控制方向盘、油门和制动器和所有其他车辆控制装置
1 Level:驾驶员辅助,车辆为驾驶员提供转向和加速支持,例如巡航控制。驾驶员必须充分参与,但可以放弃一些自制系统的控制
2 Level:部分自动化 ,车辆自动控制几项功能,如自动巡航控制和车道保持
3 Level:有条件的自动化
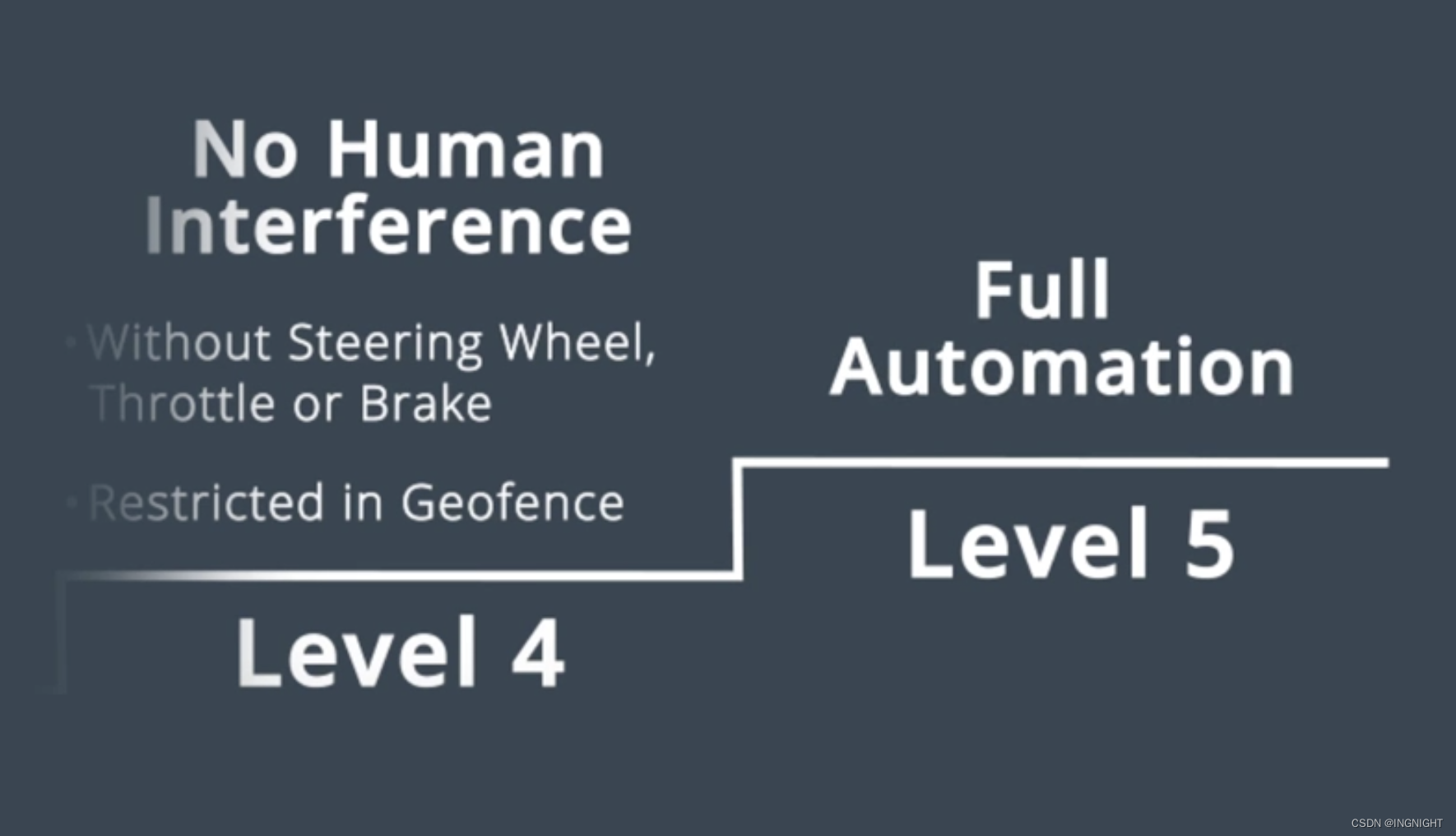
4 Level:高度自动化,并且不期望驾驶员介入。在地理围栏内性质
5 Level:人类可以行驶的任何地方完全自主地运行

无人驾驶车辆由专门计算机和传感器组成,自主计算单元比人计算快十倍,甚至快多倍。在Apollo系统中,车辆计算单元受到大规模且强有力的云集群支持,任何给定的无人车驾驶车辆都有许多先进的传感器,他们执行感知和定位等任务,借助人工智能和传感器,车辆可以独立于任何人类驾驶员实现自主操作

计算机视觉:通过摄像头图像弄清楚我们周围的世界是怎么样的
传感器融合:合并起来其他的传感器数据,如激光和雷达,从而更深入地了解我们的周围的环境
(获得摄像头很难测量到的测量值,搞清楚很多信息,如我们与其他汽车之间的距离,周围其他物理的移动速度。激光阵列是激光雷达对周围世界的360度扫描)
定位:来精确地确定我们在那个世界所处的位置
路径规划:预测道路上的其他车辆去向,然后推算出他的车辆应该采取何种应对措施,然后最终建立一系列路径点
控制:如何转动方向盘,打开油门,并且踩动制动器,让汽车沿着我们在路径规划期间建立的轨道。
总结:计算机视觉和传感器融合获得一副我们在世界上的位置丰富画面,使用定位确定我们在世界的精确位置,然后使用路径规划来绘制一条通过这个世界到达目的地的路径,通过控制转动方向盘,打开油门,并且踩动制动器,沿着轨迹行驶,并最终移动车辆








-
相关阅读:
基础矩阵和本质矩阵
关于自己DIY配置电脑
Python可视化数据分析10、Matplotlib库
以太网转RS485串口计数器WiFI模块 LED灯光控制器IBF165
解决:java: 错误: 不支持发行版本 5 最有效方法
微服务:高性能网关 ShenYu简介
Error: [mobx-miniprogram] no store specified (小程序全局数据共享bug)
数据抓取可以应用到哪些行业
Qt中常用对话框
Redis5搭建集群
- 原文地址:https://blog.csdn.net/INGNIGHT/article/details/128167277