-
ROS——构建一个模拟的两轮ROS机器人
1. 确保已经安装了Rviz
2. 生成并构建ROS功能包
2.1 生成一个catkin工作空间
$ mkdir -p ~/catkin_ws/src $ cd ~/catkin_ws/src $ catkin_init_workspace- 1
- 2
- 3
编译工作空间
$ cd ~/catkin_ws/ $ catkin_make- 1
- 2
加载源文件
$ source ~/catkin_ws/devel/setup.bash- 1
在.bashrc文件中加入命令
$ echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc- 1
为了确定源文件是否被加载,通过下列命令查询ROS环境正在使用的工作空间
$ echo $ROS_PACKAGE_PATH- 1
对应输出应为:
home/username/catkin_ws/src:/opt/ros/noetic/share- 1
2.2 漏了一个懒得改
2.3 构建差分驱动的机器人的URDF
URDF是具有特殊定义的XML格式的文件,专门用来对机器人组件级别进行抽象的模型描述。
在ros_robotics功能包目录生成一个/urdf目录:$ cd ~/catkin_ws/src/robotics $ mkdir urdf $ cd urdf- 1
- 2
- 3
2.3.1 创建机器人底座
机器人的第一个组成部分是底座盒子长宽高分别为0.5,0.5,0.25。
新建文件dd_robot.urdf保存在urdf文件夹下。< <robot name="dd_robot"> <link name="base_link"> <visual> <origin xyz="0 0 0 " rpy="0 0 0" /> <geometry> <box size="0.5 0.5 0.25" /> geometry> visual> link> robot>- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
2.3.2 使用roslaunch
roslaunch:能够简化启动多个ROS节点的过程;简化参数服务器设置的过程
使用时需通过roscore命令来启动节点管理器
roslaunch语法结构$ roslaunch <package_name> <file.launch>- 1
在ros_robotics功能包里面新建文件夹lacunch,再新建ddrobot_rviz.launch文件
<launch> <arg name="model"/> <arg name="gui" default="False"/> <param name="robot_description" textfile="$(find ros_robotics)/urdf/$(arg model)"/> <param name="use_gui" value="$(arg gui)"/> <node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher"/> <node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher"/> <node name="rviz" pkg="rviz" type="rviz" args="-d $(find ros_robotics)/urdf.rviz" required="true"/> launch>- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
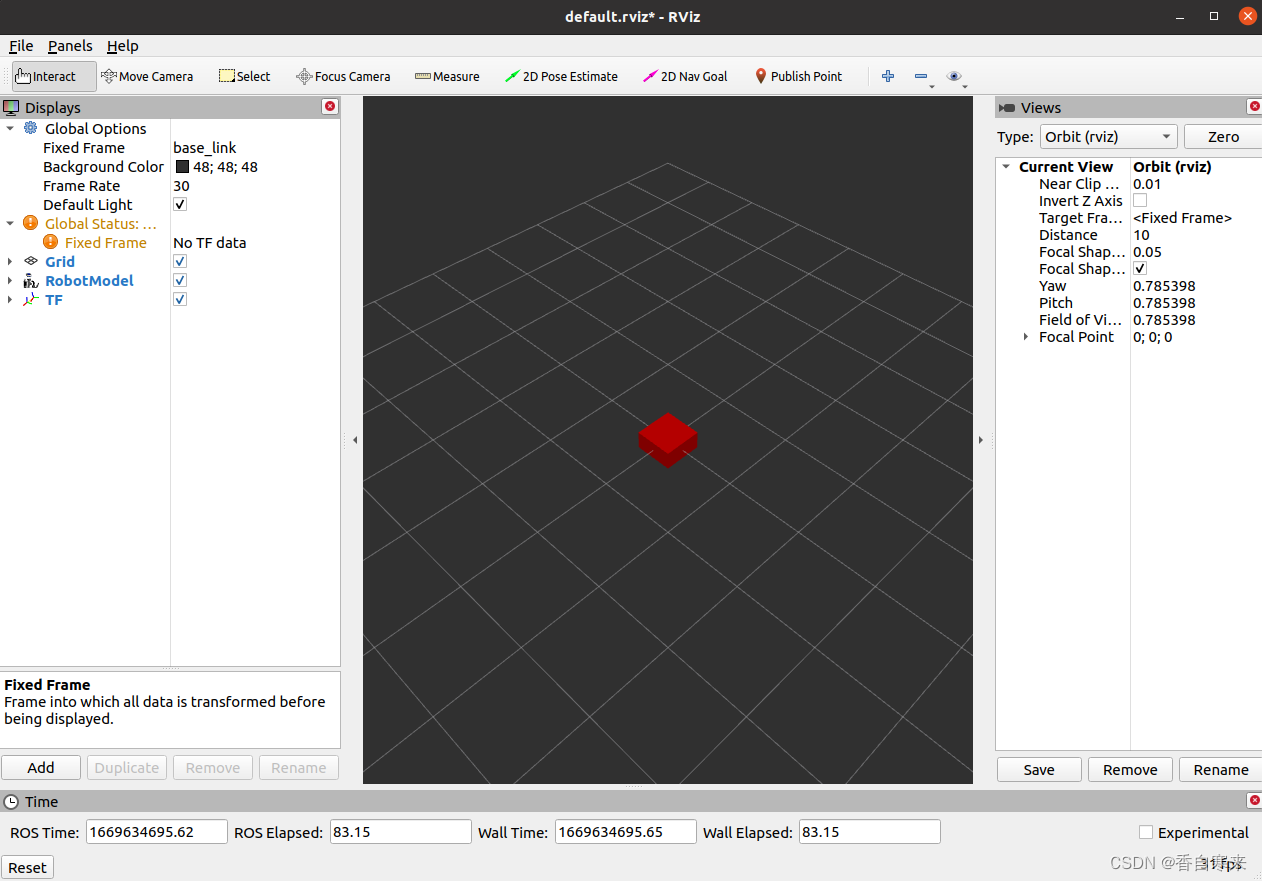
输入以下命令查看机器人模型
$ roslaunch ros_robotics ddrobot_rviz.launch model:=dd_robot.urdf- 1
如果出现下面错误,RLException: [ddrobot_rviz.launch] is neither a launch file in package [launch] nor is [launch] a launch file name
The traceback for the exception was written to the log file

解决方法:将devel/setup.bash添加到系统source ./devel/setup.bash- 1
在displays添加Robotmodel和TF,并将FIxed frame改为base_link。
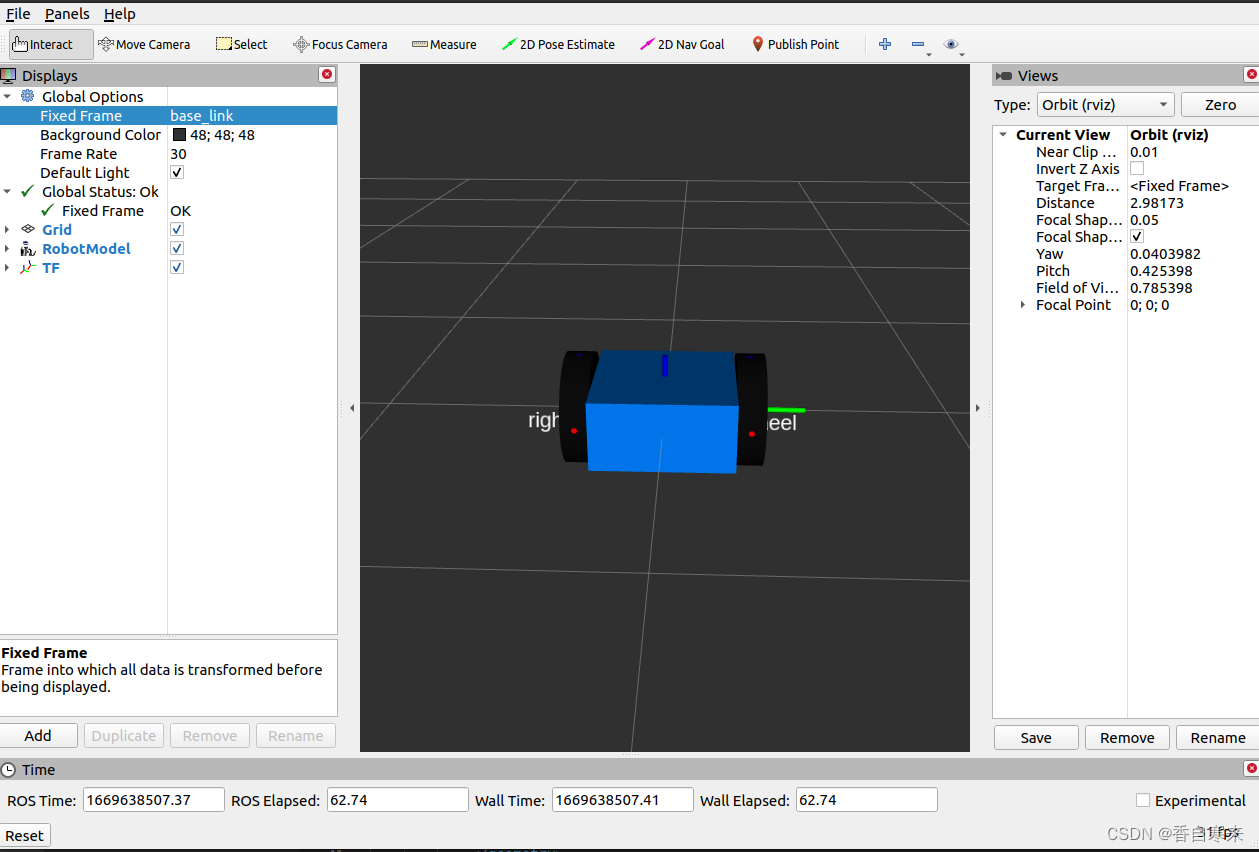
2.3.3 添加轮子
继续在上一段代码加
<robot name="dd_robot"> <link name="base_link"> <visual> <origin xyz="0 0 0 " rpy="0 0 0" /> <geometry> <box size="0.5 0.5 0.25" /> geometry> visual> link> <link name="right_wheel"> <visual> <origin xyz="0 0 0" rpy="1.570795 0 0 " /> <geometry> <cylinder length="0.1" radius="0.2"/> geometry> visual> link> <joint name="joint_right_wheel" type="continuous"> <parent link="base_link"/> <child link="right_wheel"/> <origin xyz="0 -0.30 0" rpy="0 0 0"/> <axis xyz="0 1 0"/> joint> <link name="left_wheel"> <visual> <origin xyz="0 0 0" rpy="1.570795 0 0" /> <geometry> <cylinder length="0.1" radius="0.2"/> geometry> visual> link> <joint name="joint_left_wheel" type="continuous"> <parent link="base_link"/> <child link="left_wheel"/> <origin xyz="0 0.30 0" rpy="0 0 0"/> <axis xyz="0 1 0"/> joint> robot>- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
运行
2.3.4 添加颜色
为了方便观看
还是在上面代码改<robot name="dd_robot"> <link name="base_link"> <visual> <origin xyz="0 0 0 " rpy="0 0 0" /> <geometry> <box size="0.5 0.5 0.25" /> geometry> <material name="blue"> <color rgba="0 0.5 1 1"/> material> visual> link> <link name="right_wheel"> <visual> <origin xyz="0 0 0" rpy="1.570795 0 0 " /> <geometry> <cylinder length="0.1" radius="0.2"/> geometry> <material name="black"> <color rgba="0.05 0.05 0.05 1"/> material> visual> link> <joint name="joint_right_wheel" type="continuous"> <parent link="base_link"/> <child link="right_wheel"/> <origin xyz="0 -0.30 0" rpy="0 0 0"/> <axis xyz="0 1 0"/> joint> <link name="left_wheel"> <visual> <origin xyz="0 0 0" rpy="1.570795 0 0" /> <geometry> <cylinder length="0.1" radius="0.2"/> geometry> <material name="black"> <color rgba="0.05 0.05 0.05 1"/> material> visual> link> <joint name="joint_left_wheel" type="continuous"> <parent link="base_link"/> <child link="left_wheel"/> <origin xyz="0 0.30 0" rpy="0 0 0"/> <axis xyz="0 1 0"/> joint> robot>- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
继续运行,我们的车出来了
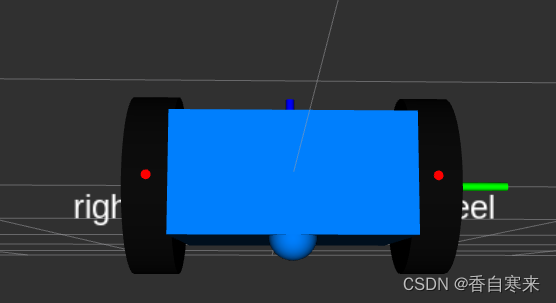
2.3.5 添加小脚轮
添加小脚轮来使小车平衡
在base_link加代码
<visual name="caster"> <origin xyz="0.2 0 -0.125" rpy="0 0 0"/> <geometry> <sphere radius="0.05"/> geometry> visual>- 1
- 2
- 3
- 4
- 5
- 6
- 7
2.3.6 添加碰撞属性
添加碰撞属性来使小车检测和识别物体的边界
同样是在元素中加属性
完整代码<robot name="dd_robot"> <link name="base_link"> <visual> <origin xyz="0 0 0 " rpy="0 0 0" /> <geometry> <box size="0.5 0.5 0.25" /> geometry> <material name="blue"> <color rgba="0 0.5 1 1"/> material> visual> <collision> <origin xyz="0 0 0 " rpy="0 0 0 "/> <geometry> <box size="0.5 0.5 0.25"/> geometry> collision> <visual name="caster"> <origin xyz="0.2 0 -0.125" rpy="0 0 0"/> <geometry> <sphere radius="0.05"/> geometry> visual> <collision> <origin xyz="0.2 0 -0.125" rpy="0 0 0 "/> <geometry> <sphere radius="0.05"/> geometry> collision> link> <link name="right_wheel"> <visual> <origin xyz="0 0 0" rpy="1.570795 0 0 " /> <geometry> <cylinder length="0.1" radius="0.2"/> geometry> <material name="black"> <color rgba="0.05 0.05 0.05 1"/> material> visual> <collision> <origin xyz="0 0 0" rpy="1.570795 0 0 "/> <geometry> <cylinder length="0.1" radius="0.2"/> geometry> collision> link> <joint name="joint_right_wheel" type="continuous"> <parent link="base_link"/> <child link="right_wheel"/> <origin xyz="0 -0.30 0" rpy="0 0 0"/> <axis xyz="0 1 0"/> joint> <link name="left_wheel"> <visual> <origin xyz="0 0 0" rpy="1.570795 0 0" /> <geometry> <cylinder length="0.1" radius="0.2"/> geometry> <material name="black"> <color rgba="0.05 0.05 0.05 1"/> material> visual> <collision> <origin xyz="0 0 0" rpy="1.570795 0 0 "/> <geometry> <cylinder length="0.1" radius="0.2"/> geometry> collision> link> <joint name="joint_left_wheel" type="continuous"> <parent link="base_link"/> <child link="left_wheel"/> <origin xyz="0 0.30 0" rpy="0 0 0"/> <axis xyz="0 1 0"/> joint> robot>- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
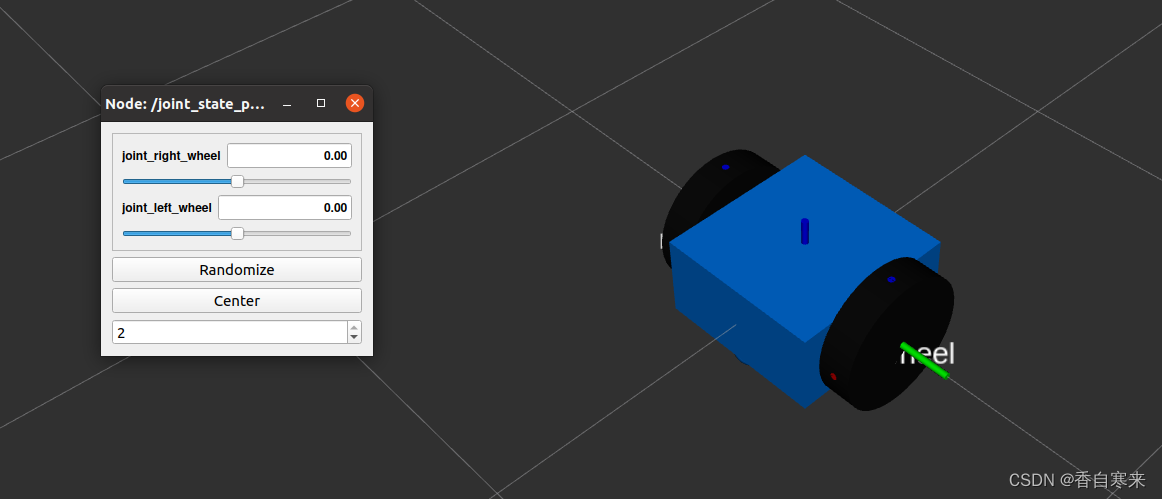
2.3.7 移动轮子
接下来,我们通过GUI弹窗来控制轮子的关节组件
将gui添加到命令字段,如下:$ roslaunch ros_robotics ddrobot_rviz.launch model:=dd_robot.urdf gui:=True- 1
如果发现打开Rviz,发现没有GUI窗口。采用下面这个方法
- 下载joint_state_publisher_gui
$ sudo apt-get install ros-noetic-joint-state-publisher-gui- 1
- 将launch文件里面的joint_state_publisher改为joint_state_publisher_gui
- 重新运行命令,就会出现GUI窗口了
2.3.8 添加物理属性
物理属性:包括惯性
,3*3矩阵;质量 ,单位kg
之后就可以在Gazebo引擎中启动了
需要在中添加标签
具体代码较长<robot name="dd_robot"> <link name="base_link"> <visual> <origin xyz="0 0 0 " rpy="0 0 0" /> <geometry> <box size="0.5 0.5 0.25" /> geometry> <material name="blue"> <color rgba="0 0.5 1 1"/> material> visual> <collision> <origin xyz="0 0 0 " rpy="0 0 0 "/> <geometry> <box size="0.5 0.5 0.25"/> geometry> collision> <inertial> <mass value="5"/> <inertia ixx="0.13" ixy="0.0" ixz="0.0" iyy="0.21" iyz="0.0" izz="0.13"/> inertial> <visual name="caster"> <origin xyz="0.2 0 -0.125" rpy="0 0 0"/> <geometry> <sphere radius="0.05"/> geometry> visual> <collision> <origin xyz="0.2 0 -0.125" rpy="0 0 0 "/> <geometry> <sphere radius="0.05"/> geometry> collision> <inertial> <mass value="0.5"/> <inertia ixx="0.0001" ixy="0.0" ixz="0.0" iyy="0.0001" iyz="0.0" izz="0.0001"/> inertial> link> <link name="right_wheel"> <visual> <origin xyz="0 0 0" rpy="1.570795 0 0 " /> <geometry> <cylinder length="0.1" radius="0.2"/> geometry> <material name="black"> <color rgba="0.05 0.05 0.05 1"/> material> visual> <collision> <origin xyz="0 0 0" rpy="1.570795 0 0 "/> <geometry> <cylinder length="0.1" radius="0.2"/> geometry> collision> <inertial> <mass value="0.5"/> <inertia ixx="0.01" ixy="0.0" ixz="0.0" iyy="0.005" iyz="0.0" izz="0.005"/> inertial> link> <joint name="joint_right_wheel" type="continuous"> <parent link="base_link"/> <child link="right_wheel"/> <origin xyz="0 -0.30 0" rpy="0 0 0"/> <axis xyz="0 1 0"/> joint> <link name="left_wheel"> <visual> <origin xyz="0 0 0" rpy="1.570795 0 0" /> <geometry> <cylinder length="0.1" radius="0.2"/> geometry> <material name="black"> <color rgba="0.05 0.05 0.05 1"/> material> visual> <collision> <origin xyz="0 0 0" rpy="1.570795 0 0 "/> <geometry> <cylinder length="0.1" radius="0.2"/> geometry> collision> <inertial> <mass value="0.5"/> <inertia ixx="0.01" ixy="0.0" ixz="0.0" iyy="0.005" iyz="0.0" izz="0.005"/> inertial> link> <joint name="joint_left_wheel" type="continuous"> <parent link="base_link"/> <child link="left_wheel"/> <origin xyz="0 0.30 0" rpy="0 0 0"/> <axis xyz="0 1 0"/> joint> robot>- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
我们可以使用check_urdf工具来检查语法
$ check_urdf dd_robot.urdf- 1
2.4 Gazebo
2.4.1 安装Gazebo
打开Gazebo
$ gazebo- 1
2.4.2 使用roslaunch启动Gazebo
$ roslaunch gazebo_ros empty_world.launch- 1
2.4.3 更改颜色
<gazebo reference="base_link"> material>Gazebo/Bluematerial> <pose>0 0 3 0 0 0pose> gazebo>- 1
- 2
- 3
- 4
2.4.4模型验证
验证代码是否有问题
$ gzsdf -p dd_robot.gazebo- 1
如果这个有问题换下面的
$ gz sdf -p dd_robot.gazebo- 1
2.4.5 在Gazebo中查看URDF
使用XML生成ddrobot_gazebo.launch
<launch> <include file="$(find gazebo_ros)/launch/empty_world.launch"> <arg name="world_name" value="$(find ros_robotics)/worlds/ddrobot.world"/> <arg name="paused" default="false"/> <arg name="use_sim_time" default="true"/> <arg name="gui" default="true"/> <arg name="headless" default="false"/> <arg name="debug" default="false"/> include> <node name="spawn_urdf" pkg="gazebo_ros" type="spawn_model" output="screen" args="-file $(find ros_robotics)/urdf/dd_robot.gazebo -urdf -model ddrobot" /> launch>- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
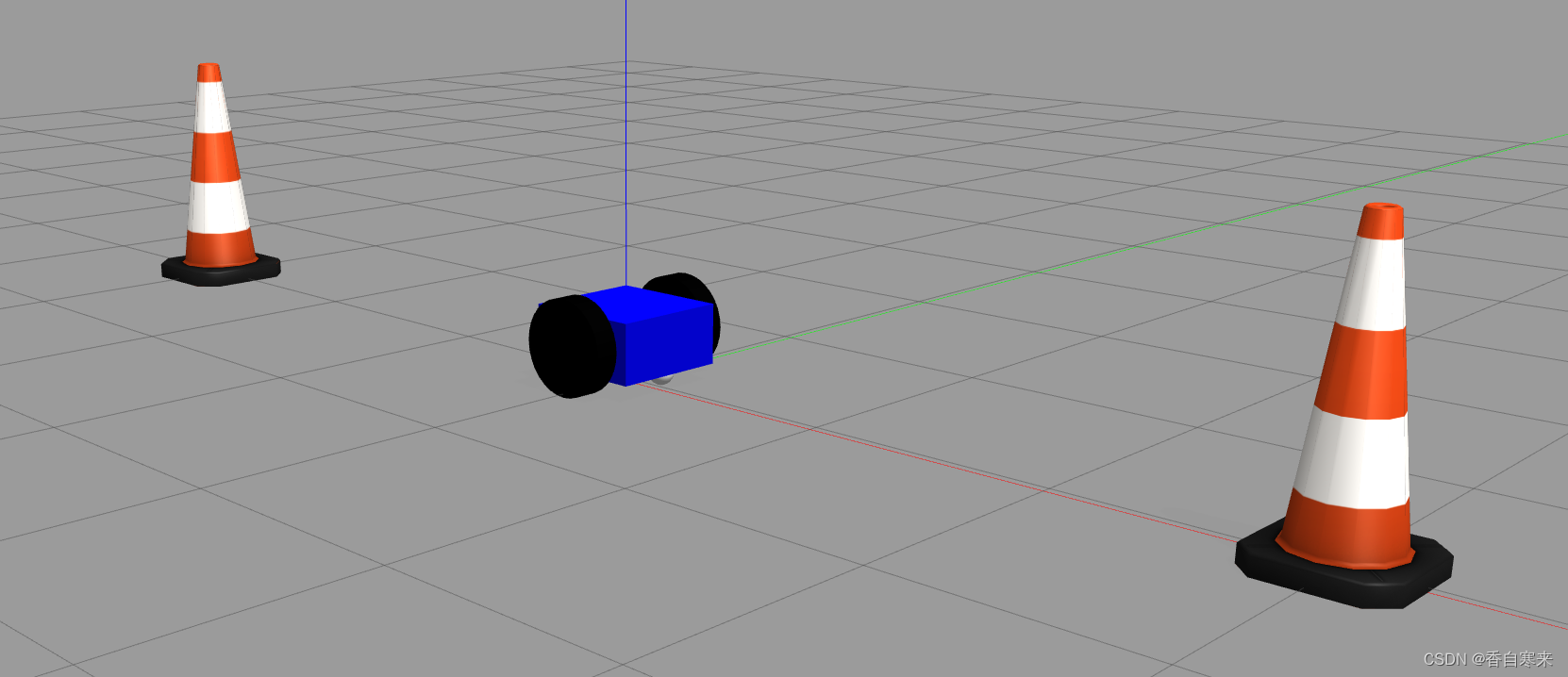
2.4.6 新建环境
在功能包里面新建文件夹worlds
新建文件ddrobot.world<sdf version="1.4"> <world name="default"> <include> <uri>model://ground_planeuri> include> <include> <uri>model://sunuri> include> <include> <uri>model://construction_coneuri> <name>construction_conename> <pose>-3.0 0 0 0 0 0pose> include> <include> <uri>model://construction_coneuri> <name>construction_conename> <pose>3.0 0 0 0 0 0pose> include> world> sdf>- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
参考文献:ROS机器人开发实用案例分析(第二版) -
相关阅读:
5年软件测试工程师感悟——写给还在迷茫的朋友
基于JavaSwing开发数字识别系统+PPT+系统文档 课程设计 大作业源码
Spring MVC使用SessionLocaleResolver实现用户自定义切换语言实例
leetcode 746 使用最小花费爬楼梯
博客园美化显示效果
【数据结构】LinkedList与链表
算法 | A*算法实现最优路径规划
基于.NetCore开发博客项目 StarBlog - (10) 图片瀑布流
STC15单片机-数码管显示PCB板温度(TM1620驱动芯片使用介绍)
H指数----题解报告
- 原文地址:https://blog.csdn.net/qq_40843903/article/details/128069574
