-
ROS实现话题的发布与订阅
系统版本(架构):Debian 9(aarch64)
ROS版本:ROS Melodic Morenia
Python版本:2.7.13和3.5.3
gcc 版本:9.3.0
catkin-tools:0.6.1
Cmake版本:3.24.31 创建ROS工作空间
$ mkdir -p exp_ws/src $ cd /exp_ws $ catkin_make- 1
- 2
- 3
这里的
exp_ws是工作空间的名字,可自定义。2 添加环境变量
echo "source /mnt/sd/exp_ws/devel/setup.bash" >> ~/.bashrc source ~/.bashrc- 1
- 2
这里注意把你的工作空间中
devel目录下的setup.bash的路径搞清楚,改成你自己的路径。3 安装ROS功能包
cd /src catkin_create_pkg pub_sub_eg roscpp std_msgs- 1
- 2

其中,pub_sub_eg是包名。4 创建发布节点pub_eg.cpp
cd /mnt/sd/exp_ws/src/pub_sub_eg/src vim pub_eg.cpp- 1
- 2
为了防止出现粘贴格式错乱,在执行
vim pub_eg.cpp后,输入:set paste,使vim编辑器进入粘贴模式,然后粘贴。
然后将下面的代码复制到pub_eg.cpp里面。//pub_eg.cpp #include "ros/ros.h" #include "std_msgs/String.h" #includeint main(int argc, char **argv) { //ROS初始化 pub_node是节点的名字 ros::init(argc, argv, "pub_node"); ros::NodeHandle n; ros::Publisher chatter_pub = n.advertise<std_msgs::String>("chatter", 1000); ros::Rate loop_rate(10); int count = 0; while (ros::ok()) { std_msgs::String msg; std::stringstream ss; ss << "All Right" << count; msg.data = ss.str(); ROS_INFO("%s", msg.data.c_str()); chatter_pub.publish(msg); ros::spinOnce(); loop_rate.sleep(); ++count; } return 0; } - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
5 创建订阅节点sub_eg.cpp
cd /mnt/sd/exp_ws/src/pub_sub_eg/src vim sub_eg.cpp- 1
- 2
然后将下面的代码复制到
sub_eg.cpp里面。//sub_eg.cpp #include "ros/ros.h" #include "std_msgs/String.h" void chatterCallback(const std_msgs::String::ConstPtr& msg) { ROS_INFO("I heard: [%s]", msg->data.c_str()); } int main(int argc, char **argv) { //ROS初始化 sub_node是节点的名字 ros::init(argc, argv, "sub_node"); ros::NodeHandle n; ros::Subscriber sub = n.subscribe("chatter", 1000, chatterCallback); ros::spin(); return 0; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
将下述内容添加到
/exp_ws/src/pub_sub_eg/CMakeLists.txt文件的末尾find_package(catkin REQUIRED COMPONENTS roscpp rospy sensor_msgs geometry_msgs tf ) include_directories(include ${catkin_INCLUDE_DIRS} ${PCL_INCLUDE_DIRS}) add_executable(pub_node /mnt/sd/exp_ws/src/pub_sub_eg/src/pub_eg.cpp) target_link_libraries(pub_node ${catkin_LIBRARIES}) add_executable(sub_node /mnt/sd/exp_ws/src/pub_sub_eg/src/sub_eg.cpp) target_link_libraries(sub_node ${catkin_LIBRARIES})- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
6 编译工作空间,生成节点
cd /mnt/sd/exp_ws catkin_make- 1
- 2
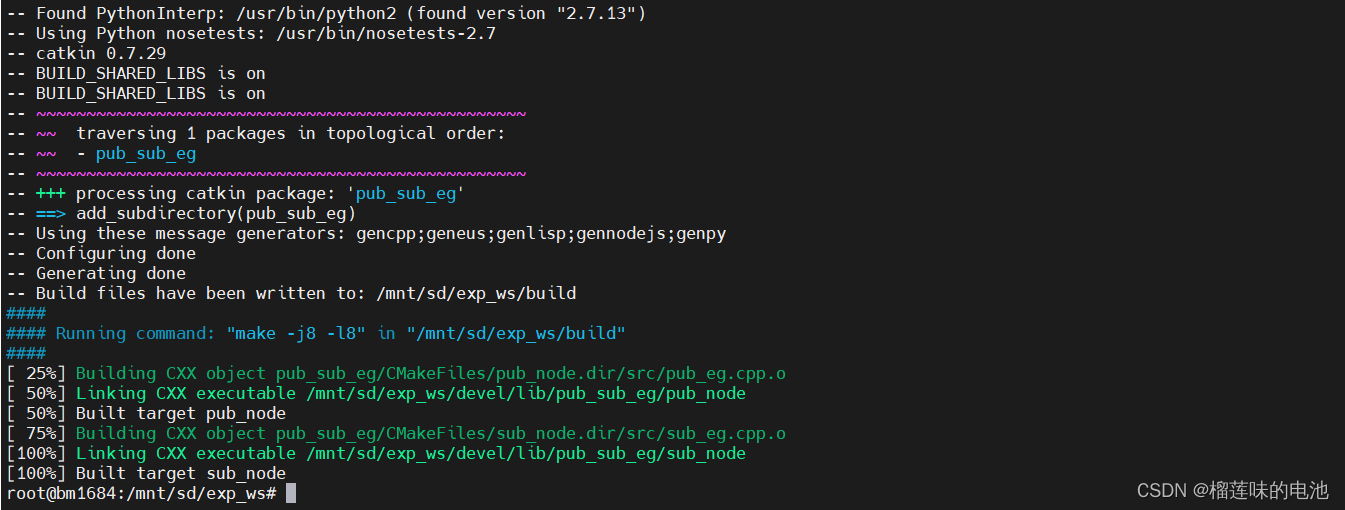
编译成功后,会生成两个可执行文件pub_node、sub_node7 运行示例
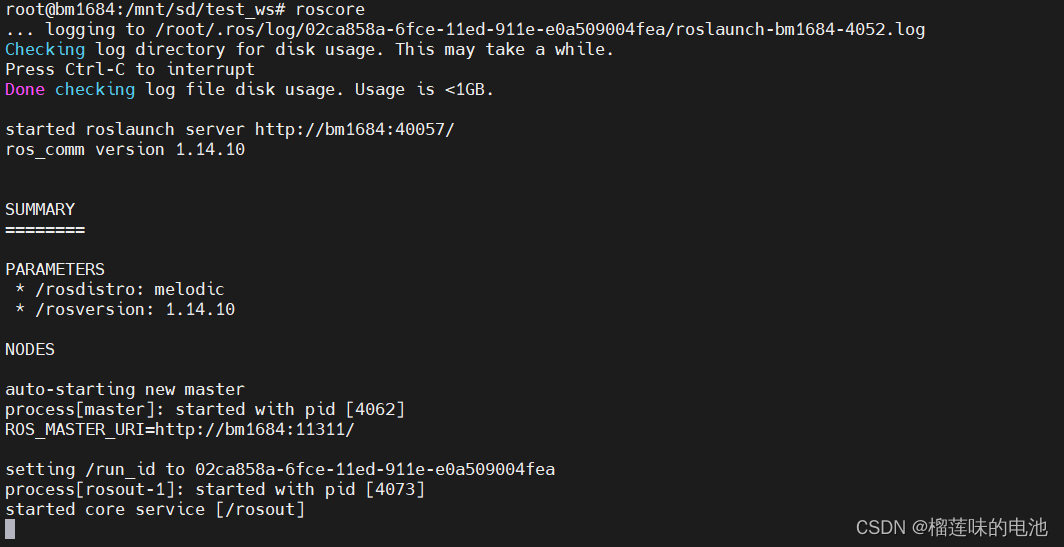
1、新建一个终端,执行下述命令,启动
ros mastersource /mnt/sd/exp_ws/devel/setup.bash roscore- 1
- 2
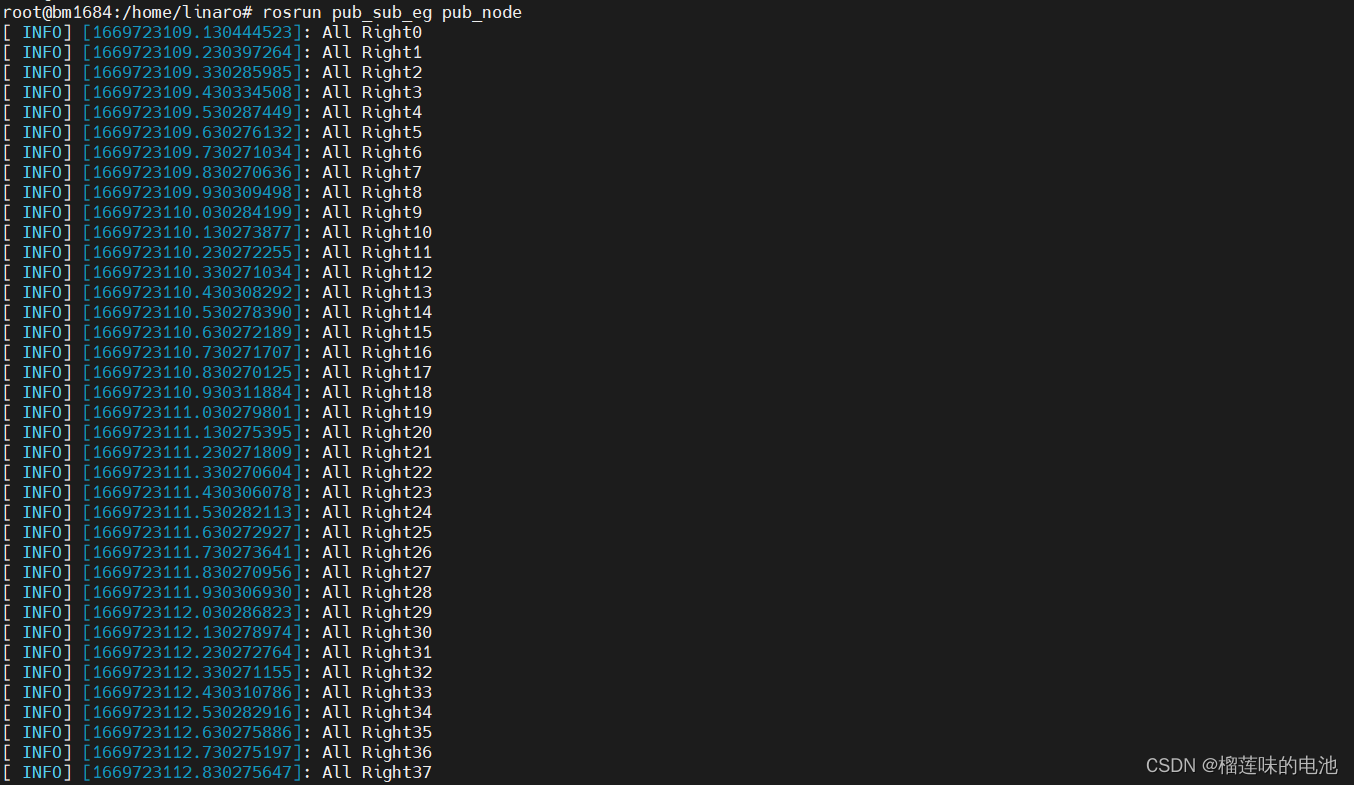
2、新建一个终端,执行下述命令,启动发布节点source /mnt/sd/exp_ws/devel/setup.bash rosrun pub_sub_eg pub_node- 1
- 2
3、新建一个终端,执行下述命令,启动订阅节点source /mnt/sd/exp_ws/devel/setup.bash rosrun pub_sub_eg sub_node- 1
- 2

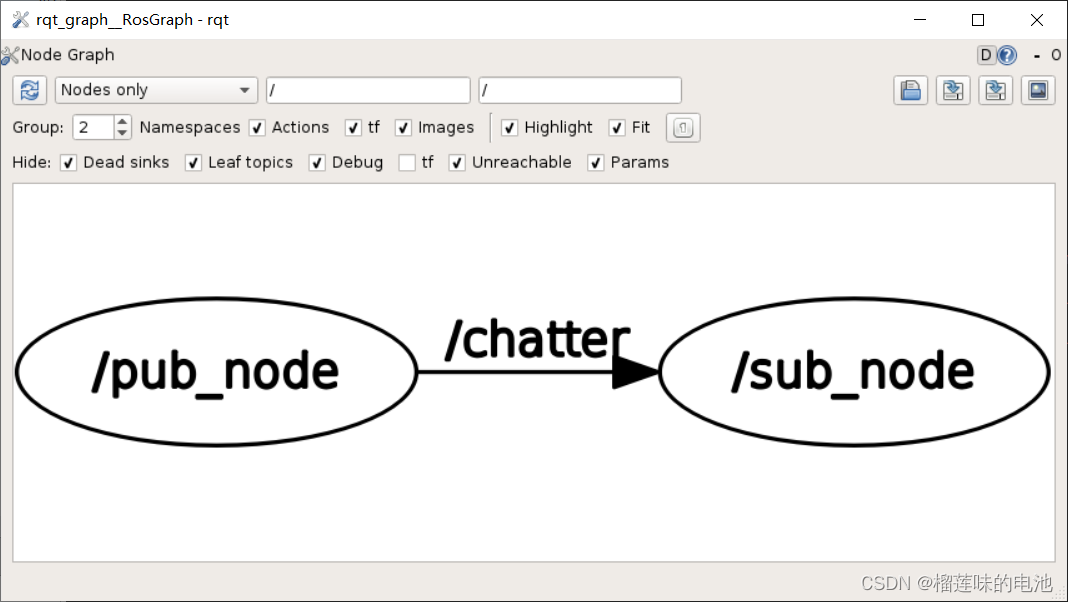
4、新建一个终端,执行命令rqt_graph,展示节点关系
8 工作空间结构展示及ROS实现话题的发布与订阅的步骤
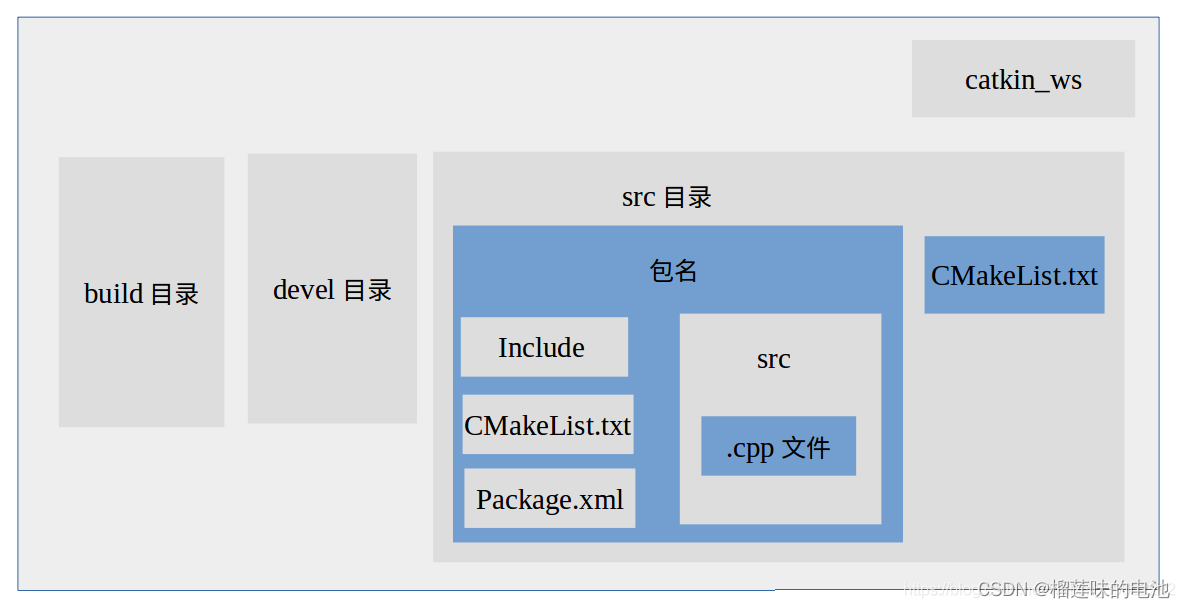
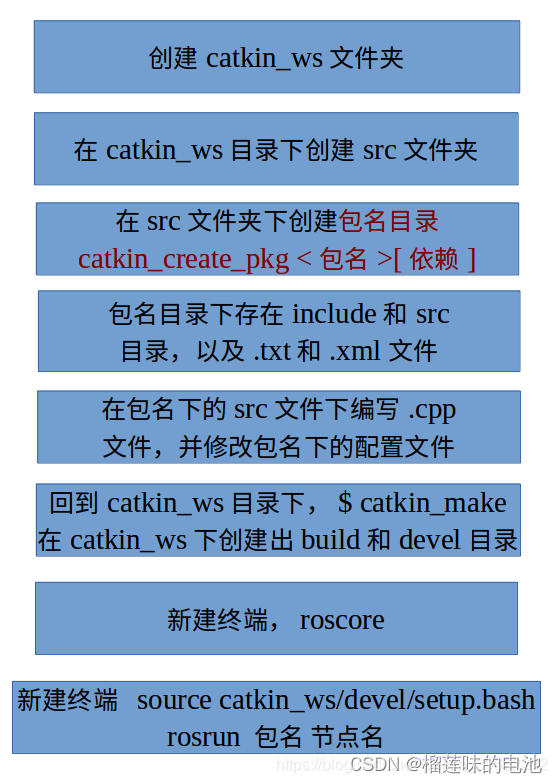
上面两张图均来源于第9章节中的[2]中。9 参考资料
1.《ROS基本操作(一):发布与订阅》
https://blog.csdn.net/qq_39916709/article/details/120428809
2.《ROS 发布及订阅消息》
https://blog.csdn.net/weixin_39652282/article/details/103425406?ops_request_misc=&request_id=&biz_id=102&utm_term=ROS%E7%9A%84%E5%8F%91%E5%B8%83%E4%B8%8E%E8%AE%A2%E9%98%85&utm_medium=distribute.pc_search_result.none-task-blog-2allsobaiduweb~default-5-103425406.142v67control,201v3add_ask,213v2t3_esquery_v3&spm=1018.2226.3001.4187
3.《ROS学习(四)发布者与订阅者》
https://blog.csdn.net/m0_56451176/article/details/126183151 -
相关阅读:
openjudge 1.5.1 求平均年龄
Android系统-默认相关配置修改大集合
python爱心代码高级
121. 买卖股票的最佳时机 --力扣 --JAVA
Microsoft SQL Server 2022 新特性之 T-SQL 语言增强
金融期货账号怎么开?
【前端攻城师之JS基础】02JS对象基础
开源大模型ChatGLM2-6B 2. 跟着LangChain参考文档搭建LLM+知识库问答系统
怎样优雅地增删查改(五):按组织架构查询
LeetCode 416. 分割等和子集(dp背包问题)
- 原文地址:https://blog.csdn.net/qq_43115981/article/details/128102450
