-
用于调整PID控制器增益的遗传算法的实现(Matlab代码实现)
🍒🍒🍒欢迎关注🌈🌈🌈
📝个人主页:我爱Matlab
👍点赞➕评论➕收藏 == 养成习惯(一键三连)🌻🌻🌻🍌希望大家多多支持🍓~一起加油 🤗
💬语录:将来的我一定会感谢现在奋斗的自己!
🍁🥬🕒摘要🕒🥬🍁
该存储库包含遗传算法 (GA) 的实现,用于调整 PID 控制器的增益。 本研究的重点是无人机(UAV)上使用的PID控制器。
autotuning_script.m: 这是一个独立的文件,模拟二阶系统的动力学。调优基于满意度等标准。
autotuning_v2: 此文件需要“reference_tracking.slx”Simulink 模型才能运行。基于参考跟踪实现调谐 a 要求的产出。
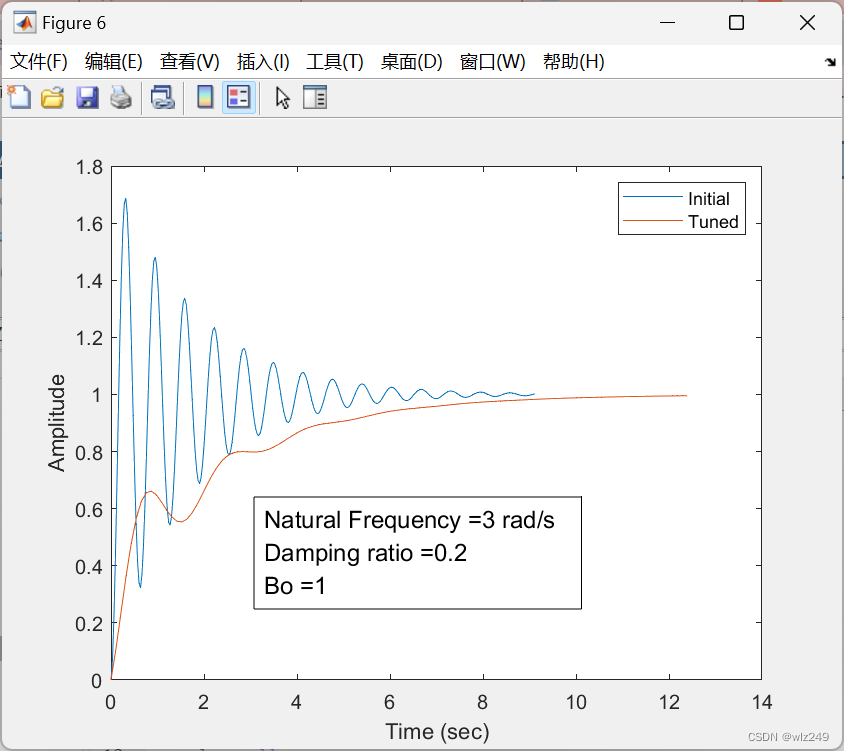
✨🔎⚡运行结果⚡🔎✨



💂♨️👨🎓Matlab代码👨🎓♨️💂
clear all;
clc;% Values of damping, natural frequency and SS gain
damping_ratio = (2:8)/10;
natural_freq = (3:10);
b0 = 1;%variables used to selected different frequency/damping values
i = 1; % natural frequency
j = 1; % damping ratio% Calculating the values of the nominator and denominator of the TF
a = b0*(natural_freq(i)^2);
b = 2*natural_freq(i)*damping_ratio(j);
c = natural_freq(i)^2;k =1;
%Simulink model required
model = 'reference_tracking';
load_system(model)max_prop_gain = 1;
max_int_gain = 1;
% kp_initial = rand*max_prop_gain;
% ki_initial = rand*max_int_gain;
kp_initial = 3;
ki_initial = 3;%population creation
gains = [ kp_initial ki_initial;
0.5*kp_initial ki_initial;
kp_initial 0.5*ki_initial;
0.5*kp_initial 0.5*ki_initial
2*kp_initial 2*ki_initial];disp(gains);
kp = kp_initial;
ki = ki_initial;kp_p1 = num2str(kp);
ki_p2 = num2str(ki);
s_kp_p1 = strcat('Initial P Gain: ', kp_p1);
s_ki_p2 = strcat('Initial I Gain: ',ki_p2);
initial_gains = [s_kp_p1 char(10) s_ki_p2]; % textbox element📜📢🌈参考文献🌈📢📜
[1]杨黎明. 一种改进的免疫遗传算法及在PID控制器优化设计中的应用[D].中南大学,2007.
-
相关阅读:
《图解HTTP》笔记1:http的诞生
IDEA的下载和安装
20 个提升效率的 JS 简写技巧
[附源码]Python计算机毕业设计SSM酒店管理系统(程序+LW)
MySQL应用——常见故障分析和检查
天猫京东整站商品数据分析,天猫商品价格数据接口,京东商品价格数据接口,电商平台商品价格数据接口流程介绍
【论文解读】Performance Comparison of H.264 and H.265 Encoders for 4K Video Sequences
论人机关系
贝锐向日葵亮相阿里云“云栖大会”:独创专利算法赋能全新云桌面
51单片机3【单片机的种类】
- 原文地址:https://blog.csdn.net/weixin_66436111/article/details/128041218