-
机器人虚拟仿真工作站考试
总共三个步骤: 创建工作台、加工零件、机器人臂 !!!!!
一、加工零件的创建
1、先打开sw软件,然后点击零件、创建进入到该软件内:

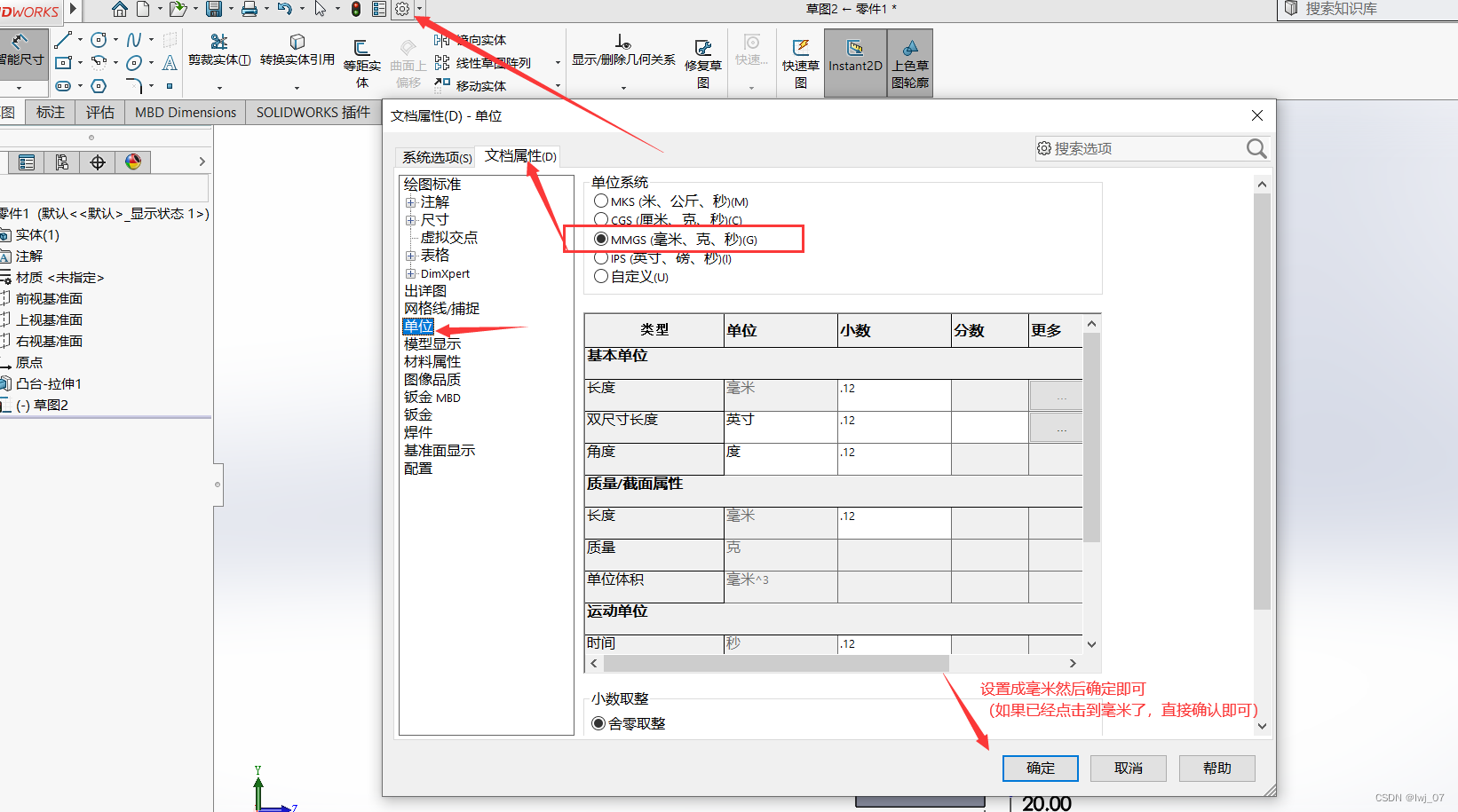
2、点击前视基础面(点击后按esc)

如果尺寸不是毫米的话:







注意: sw上 鼠标中间的按着晃动鼠标是可以摆动部件的方向的!!!!
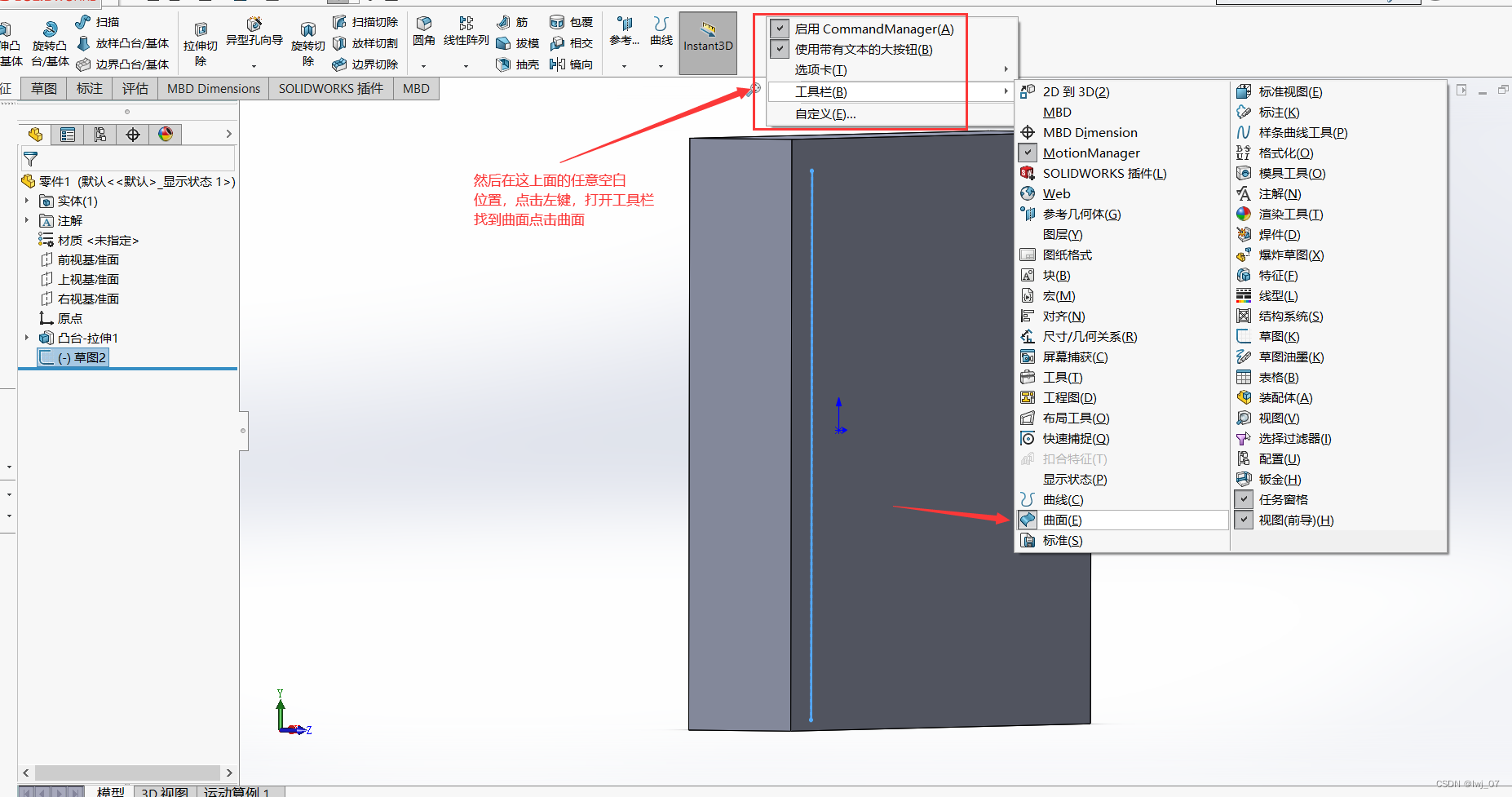
1、重点:
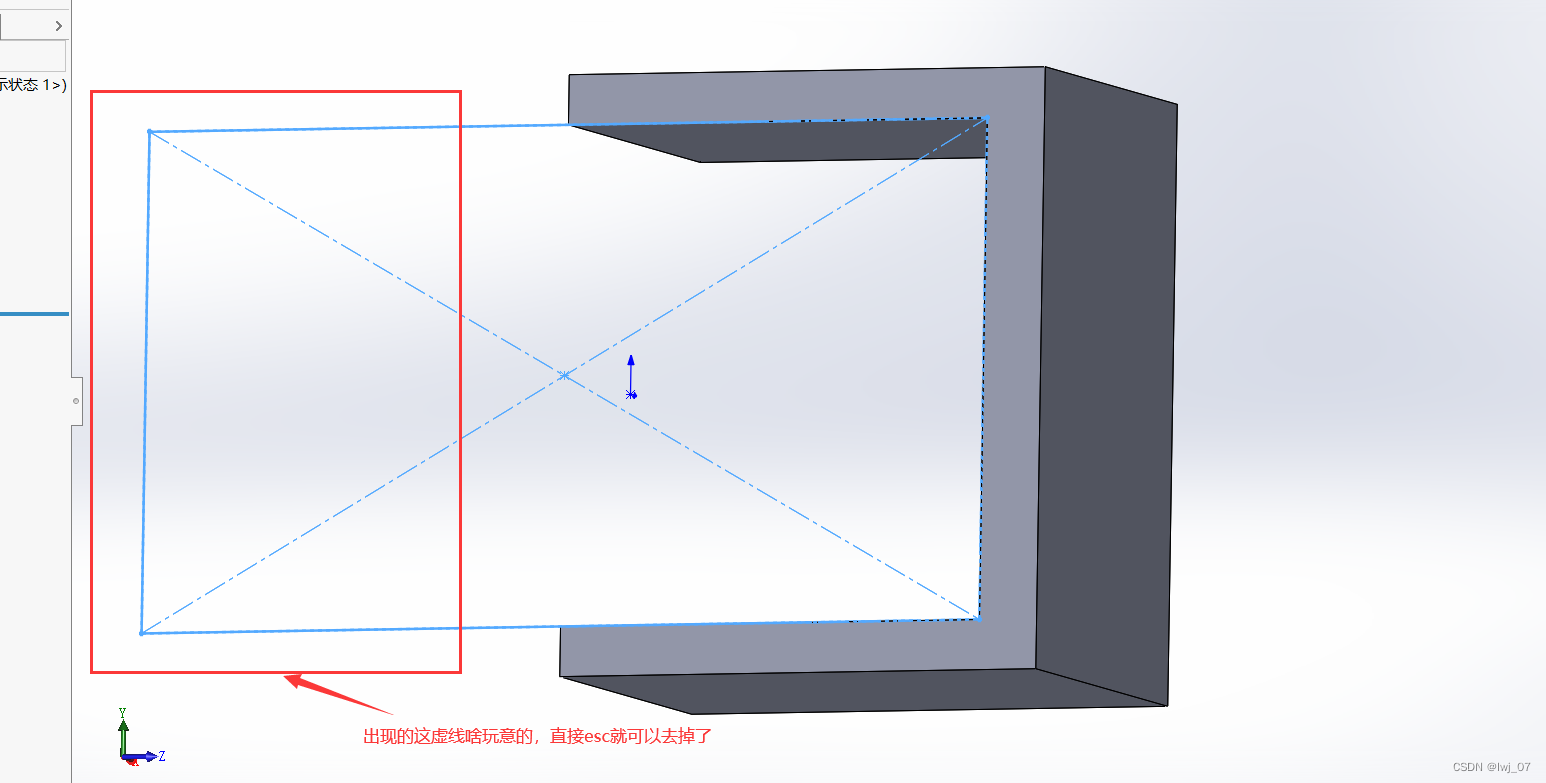
就是在绘制轨迹这一步,可能根据老师的要求是不一样的,我这里绘制的是曲线,有可能老师要求绘制的是五角星或者正方形,这个就要根据老师的要求做了,如果没有要求就直接用曲线轨迹即可,然后其他的步骤都是一样的。
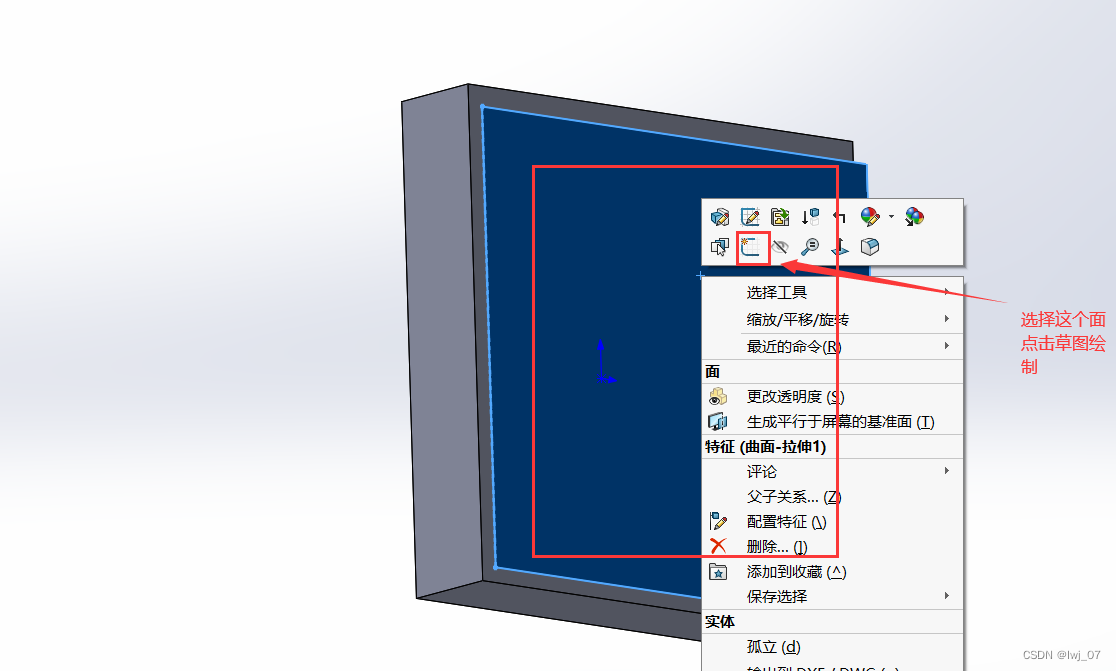



上面绘制曲线,出现一些难看的东西直接esc即可

然后点击右上角对号

那么我们这个加工零件就创建成功了~
二、创建工作台

同理再选择前视基准面:







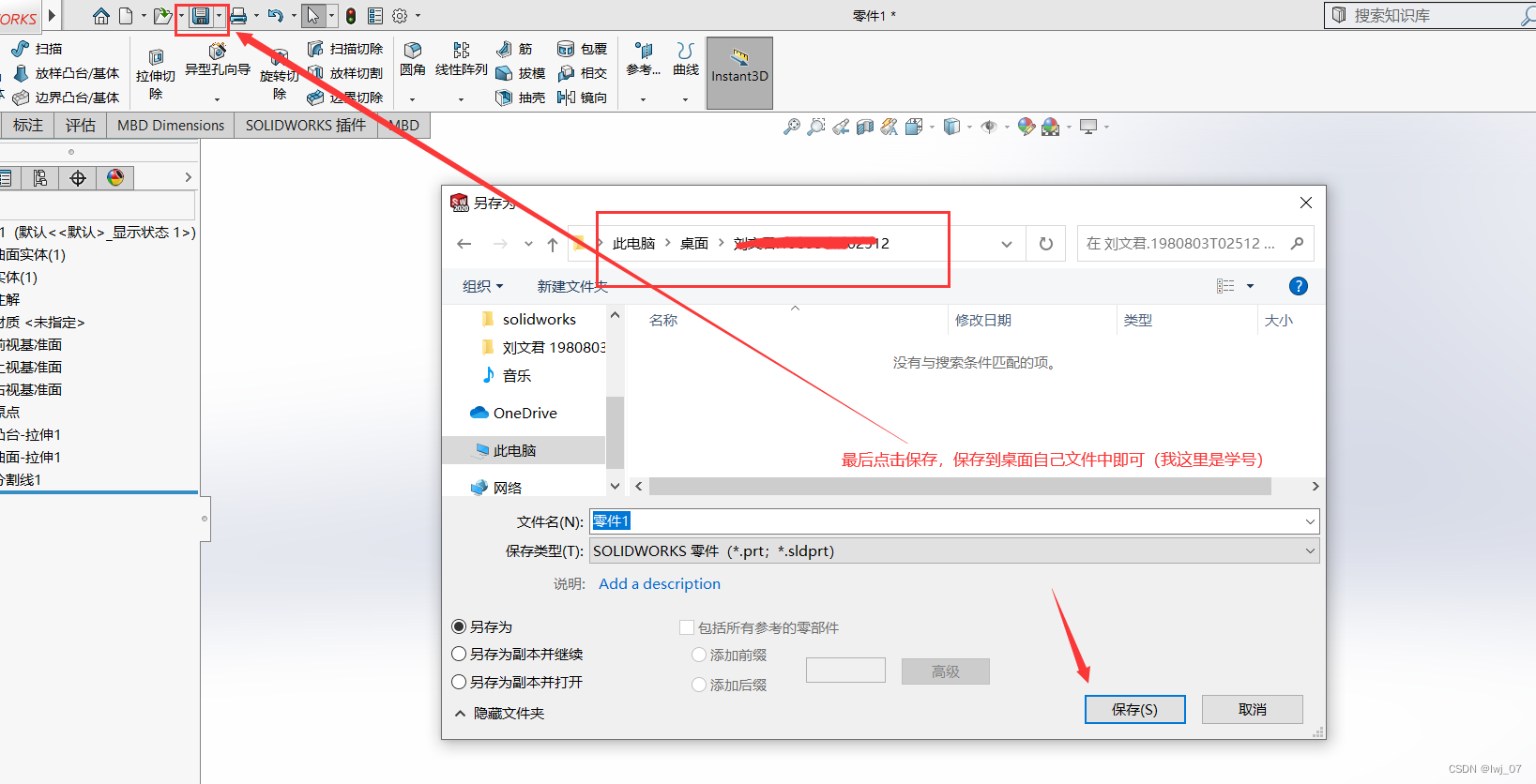
然后再点击另存为:


通过上面这些操作后,我们的工作台也创建成功了~
三、创建机器人臂
我们打开这个软件:



打开之后,就是如下的形式:

我们按着CRTL+SHIFT+鼠标左键,可以改变(旋转,不能移动)这零件的方向!!!!
CRTL+鼠标左键,可以移动零件





然后点击应用、关闭即可(然后就会成了如下的样式即可)。





然后确定,完成即可。











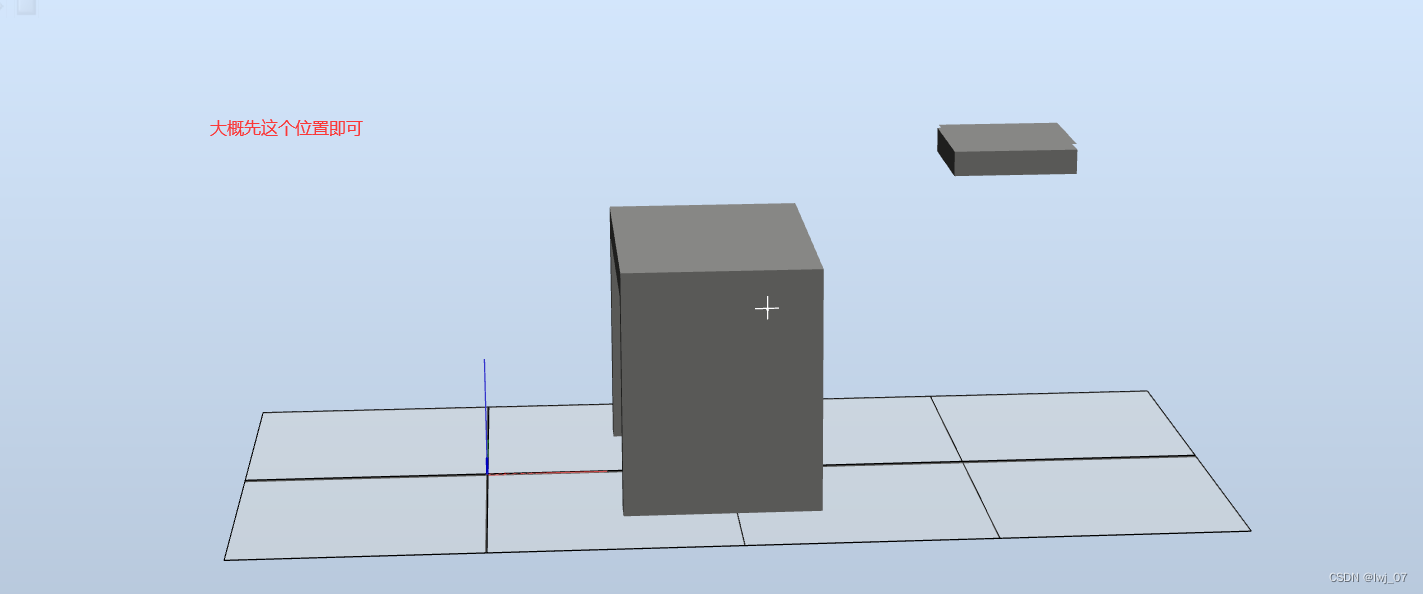
这个200不是固定值,应用测试调整到如下形式就可以了(不过200也不错):

直接点击应用然后关闭即可










然后测试后停止掉,然后点击重置即可



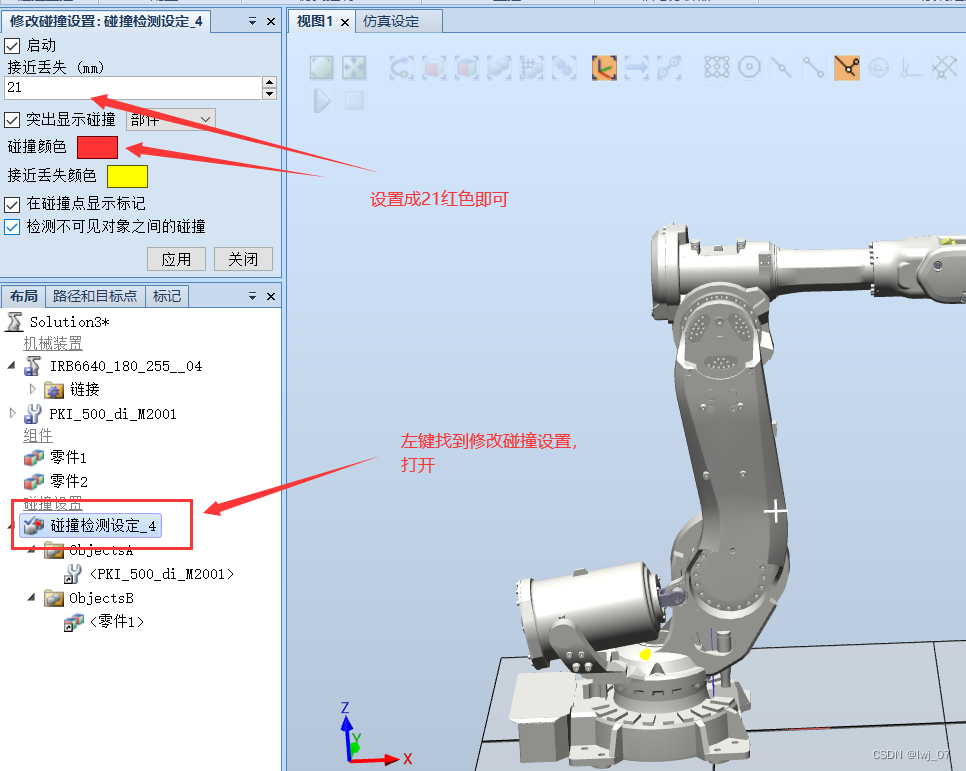
设置成30把
然后点击应用,关闭即可

然后点击停止,再点击重置(或者点击重置中的初始位置即可)
到这里基本上就完成了,然后我们再设置几个栅栏即可:

然后会发现很难看:





最后点击上面的保存工作站:


-
相关阅读:
Mac 手动安装 sshpass
大数据1.5 使用Vim编辑器
Day15--加入购物车-初始化vuex
算法通关村第13关【青铜】| 数字与数学基础问题
零基础Web安全学习笔记
5分钟带你了解什么是敏捷测试?难点显而易见!
数据结构与算法——线性查找法
RMAN备份数据库_使用RMAN做拆分镜像(split mirror)备份
使用ipmitool配置X86服务器的BMC网络和用户信息
推荐《中华小当家》
- 原文地址:https://blog.csdn.net/lwj_07/article/details/127929842