-
遨博机械臂URDF功能包ROS仿真
知识目标
学习机械臂URDF功能包文件结构
掌握机械臂URDF模型文件各元素和参数概念1.机械臂URDF功能包文件结构

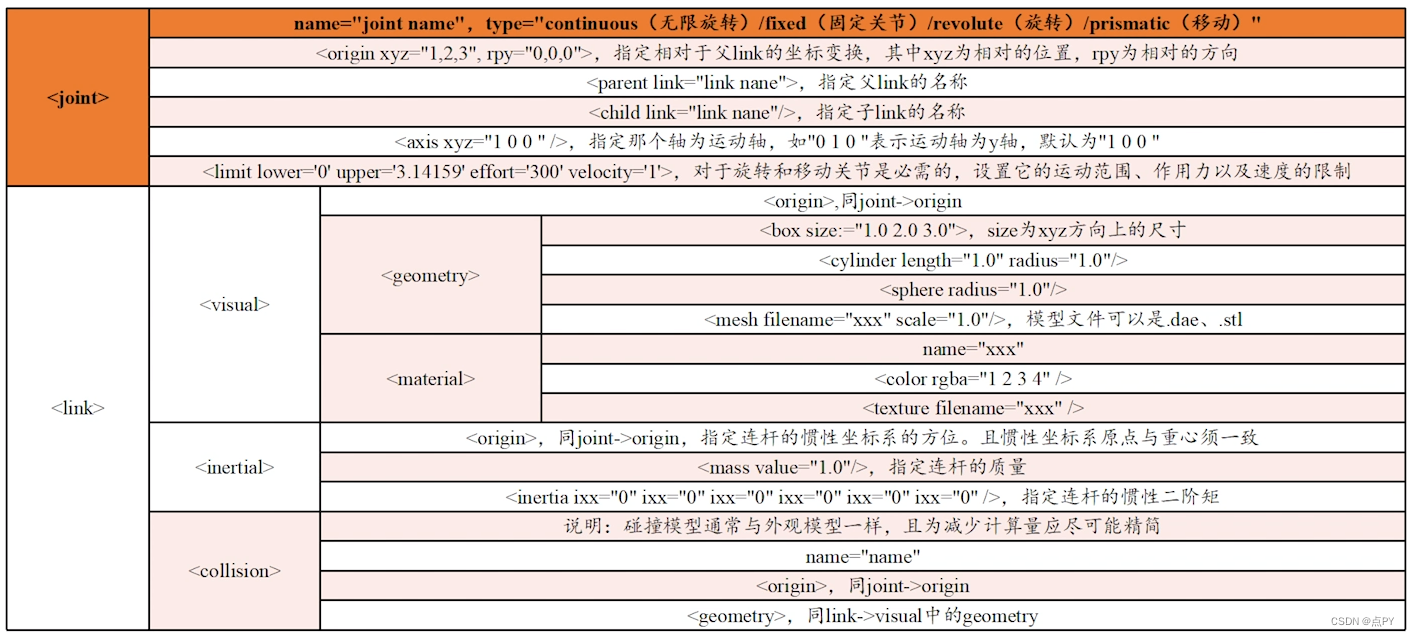
2.URDF模型中的元素和参数
机械臂URDF模型包含的内容有:连杆link、关节joint、运动学参数axis、动力学参数dynamics、可视化模型visual、碰撞检测模型collision。
3.任务描述
使用《SoildWorks插件生成机械臂URDF功能包》课程中生成的au
-
相关阅读:
旋转矩阵左乘的理解
JVM内存和垃圾回收-15.垃圾回收器
[自动化]浅聊ansible的幂等
华为配置蓝牙终端定位实验
Windows 使用nvm安装多个版本的node.js
SpringBoot 性能太差?试试这几招
iMazing 2.17.10官方中文版含2023最新激活许可证码
【正点原子STM32连载】 第四十二章 IIC实验 摘自【正点原子】APM32F407最小系统板使用指南
[附源码]计算机毕业设计基于SpringBoot的疫苗接种管理系统
EasyExcel实现动态表头功能
- 原文地址:https://blog.csdn.net/weixin_42990464/article/details/127916731