-
ElasticSearch
目录
es 生产集群的部署架构是什么?每个索引的数据量大概有多少?每个索引大概有多少个分片?
倒排索引

单词ID:记录每个单词的单词编号;
单词:对应的单词;
文档频率:代表文档集合中有多少个文档包含某个单词
倒排列表:包含单词ID及其他必要信息
DocId:单词出现的文档id
TF:单词在某个文档中出现的次数
POS:单词在文档中出现的位置
以单词“加盟”为例,其单词编号为6,文档频率为3,代表整个文档集合中有三个文档包含这个单词,对应的倒排列表为{(2;1;<4>),(3;1;<7>),(5;1;<5>)},含义是在文档2,3,5出现过这个单词,在每个文档的出现过1次,单词“加盟”在第一个文档的POS是4,即文档的第四个单词是“加盟”,其他的类似。
ES实现Master选举
Elasticsearch的选主是ZenDiscovery模块负责的,主要包含Ping(节点之间通过这个RPC来发现彼此)和Unicast(单播模块包含一个主机列表以控制哪些节点需要ping通)这两部分;
对所有可以成为master的节点(node.master: true)根据nodeId字典排序,每次选举每个节点都把自己所知道节点排一次序,然后选出第一个(第0位)节点,暂且认为它是master节点。
如果对某个节点的投票数达到一定的值(可以成为master节点数n/2+1)并且该节点自己也选举自己,那这个节点就是master。否则重新选举一直到满足上述条件。
补充:master节点的职责主要包括集群、节点和索引的管理,不负责文档级别的管理;data节点可以关闭http功能。ES更新和删除文档的过程
删除和更新也都是写操作,但是Elasticsearch中的文档是不可变的,因此不能被删除或者改动以展示其变更;
磁盘上的每个段都有一个相应的.del文件。当删除请求发送后,文档并没有真的被删除,而是在.del文件中被标记为删除。该文档依然能匹配查询,但是会在结果中被过滤掉。当段合并时,在.del文件中被标记为删除的文档将不会被写入新段。
在新的文档被创建时,Elasticsearch会为该文档指定一个版本号,当执行更新时,旧版本的文档在.del文件中被标记为删除,新版本的文档被索引到一个新段。旧版本的文档依然能匹配查询,但是会在结果中被过滤掉。写入数据的底层原理
1.数据先写入到buffer里面,在buffer里面的数据时搜索不到的,同时将数据写入到translog日志文件之中
2.如果buffer快满了,或是一段时间之后,就会将buffer数据refresh到一个新的OS cache之中,然后每隔1秒,就会将OS cache的数据写入到segment file之中,但是如果每一秒钟没有新的数据到buffer之中,就会创建一个新的空的segment file,只要buffer中的数据被refresh到OS cache之中,就代表这个数据可以被搜索到了。当然可以通过restful api 和Java api,手动的执行一次refresh操作,就是手动的将buffer中的数据刷入到OS cache之中,让数据立马搜索到,只要数据被输入到OS cache之中,buffer的内容就会被清空了。同时进行的是,数据到shard之后,就会将数据写入到translog之中,每隔5秒将translog之中的数据持久化到磁盘之中
3.重复以上的操作,每次一条数据写入buffer,同时会写入一条日志到translog日志文件之中去,这个translog文件会不断的变大,当达到一定的程度之后,就会触发commit操作。
4.将一个commit point写入到磁盘文件,里面标识着这个commit point 对应的所有segment file
5.强行将OS cache 之中的数据都fsync到磁盘文件中去。
解释:translog的作用:在执行commit之前,所有的而数据都是停留在buffer或OS cache之中,无论buffer或OS cache都是内存,一旦这台机器死了,内存的数据就会丢失,所以需要将数据对应的操作写入一个专门的日志问价之中,一旦机器出现宕机,再次重启的时候,es会主动的读取translog之中的日志文件的数据,恢复到内存buffer和OS cache之中。
将现有的translog文件进行清空,然后在重新启动一个translog,此时commit就算是成功了,默认的是每隔30分钟进行一次commit,但是如果translog的文件过大,也会触发commit,整个commit过程就叫做一个flush操作,我们也可以通过ES API,手动执行flush操作,手动将OS cache 的数据fsync到磁盘上面去,记录一个commit point,清空translog文件
补充:其实translog的数据也是先写入到OS cache之中的,默认每隔5秒之中将数据刷新到硬盘中去,也就是说,可能有5秒的数据仅仅停留在buffer或者translog文件的OS cache中,如果此时机器挂了,会丢失5秒的数据,但是这样的性能比较好,我们也可以将每次的操作都必须是直接fsync到磁盘,但是性能会比较差。
如果时删除操作,commit的时候会产生一个.del文件,里面讲某个doc标记为delete状态,那么搜索的时候,会根据.del文件的状态,就知道那个文件被删除了。
如果时更新操作,就是讲原来的doc标识为delete状态,然后重新写入一条数据即可。
buffer每次更新一次,就会产生一个segment file 文件,所以在默认情况之下,就会产生很多的segment file 文件,将会定期执行merge操作
每次merge的时候,就会将多个segment file 文件进行合并为一个,同时将标记为delete的文件进行删除,然后将新的segment file 文件写入到磁盘,这里会写一个commit point,标识所有的新的segment file,然后打开新的segment file供搜索使用。
总之,segment的四个核心概念,refresh,flush,translog、merge搜索的底层原理
查询过程大体上分为查询和取回这两个阶段,广播查询请求到所有相关分片,并将它们的响应整合成全局排序后的结果集合,这个结果集合会返回给客户端。
查询阶段
当一个节点接收到一个搜索请求,这这个节点就会变成协调节点,第一步就是将广播请求到搜索的每一个节点的分片拷贝,查询请求可以被某一个主分片或某一个副分片处理,协调节点将在之后的请求中轮训所有的分片拷贝来分摊负载。
每一个分片将会在本地构建一个优先级队列,如果客户端要求返回结果排序中从from 名开始的数量为size的结果集,每一个节点都会产生一个from+size大小的结果集,因此优先级队列的大小也就是from+size,分片仅仅是返回一个轻量级的结果给协调节点,包括结果级中的每一个文档的ID和进行排序所需要的信息。
协调节点将会将所有的结果进行汇总,并进行全局排序,最总得到排序结果。
取值阶段
查询过程得到的排序结果,标记处哪些文档是符合要求的,此时仍然需要获取这些文档返回给客户端
协调节点会确定实际需要的返回的文档,并向含有该文档的分片发送get请求,分片获取的文档返回给协调节点,协调节点将结果返回给客户端。并发情况下ES保证读写一致
可以通过版本号使用乐观并发控制,以确保新版本不会被旧版本覆盖,由应用层来处理具体的冲突;
另外对于写操作,一致性级别支持quorum/one/all,默认为quorum,即只有当大多数分片可用时才允许写操作。但即使大多数可用,也可能存在因为网络等原因导致写入副本失败,这样该副本被认为故障,分片将会在一个不同的节点上重建。
对于读操作,可以设置replication为sync(默认),这使得操作在主分片和副本分片都完成后才会返回;如果设置replication为async时,也可以通过设置搜索请求参数_preference为primary来查询主分片,确保文档是最新版本。分片介绍
分片可以是主分片或者是复制分片。
主分片在一个多分片的索引中写入数据时,通过路由来确定具体写入哪一个分片中,大致路由过程如下:
shard = hash(routing) % number_of_primary_shards
routing 是一个可变值,默认是文档的 _id ,也可以设置成一个自定义的值。routing 通过 hash 函数生成一个数字,然后这个数字再除以 number_of_primary_shards (主分片的数量)后得到余数 。这个在 0 到 number_of_primary_shards 之间的余数,就是所寻求的文档所在分片的位置。
这解释了为什么要在创建索引的时候就确定好主分片的数量并且永远不会改变这个数量:因为如果数量变化了,那么所有之前路由的值都会无效,文档也再也找不到了。
复制分片复制分片只是主分片的一个副本,它可以防止硬件故障导致的数据丢失,同时可以提供读请求,比如搜索或者从别的 shard 取回文档。当索引创建完成的时候,主分片的数量就固定了,但是复制分片的数量可以随时调整,根据需求扩大或者缩小规模
分片本身就是一个完整的搜索引擎,它可以使用单一节点的所有资源。主分片或者复制分片都可以处理读请求——搜索或文档检索,所以数据的冗余越多,能处理的搜索吞吐量就越大。分片的存储
ES 集群中每个节点通过路由都知道集群中的文档的存放位置,所以每个节点都有处理读写请求的能力。在一个写请求被发送到某个节点后,该节点即为协调节点,协调节点会根据路由公式计算出需要写到哪个分片上,再将请求转发到该分片的主分片节点上。假设 shard = hash(routing) % 4 = 0 ,则过程大致如下:
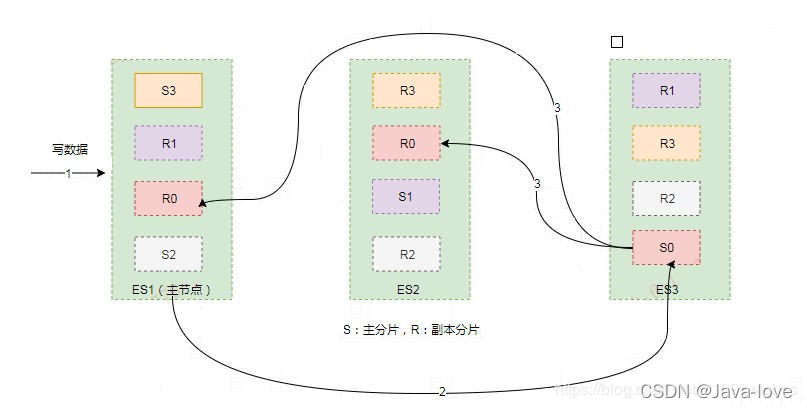
客户端向 ES1节点(协调节点)发送写请求,通过路由计算公式得到值为0,则当前数据应被写到主分片 S0 上。
ES1 节点将请求转发到 S0 主分片所在的节点 ES3,ES3 接受请求并写入到磁盘。
并发将数据复制到两个副本分片 R0 上,其中通过乐观并发控制数据的冲突。一旦所有的副本分片都报告成功,则节点 ES3 将向协调节点报告成功,协调节点向客户端报告成功。延迟写策略–近实时搜索–fresh
为了提升写的性能,ES 没有每新增一条数据就增加一个段到磁盘上,而是采用延迟写的策略。
每当有新增的数据时,就将其先写入到内存中,在内存和磁盘之间是文件系统缓存,当达到默认的时间(1秒钟)或者内存的数据达到一定量时,会触发一次刷新(Refresh),将内存中的数据生成到一个新的段上并缓存到文件缓存系统 上,稍后再被刷新到磁盘中并生成提交点。
这里的内存使用的是ES的JVM内存,而文件缓存系统使用的是操作系统的内存。新的数据会继续的被写入内存,但内存中的数据并不是以段的形式存储的,因此不能提供检索功能。由内存刷新到文件缓存系统的时候会生成了新的段,并将段打开以供搜索使用,而不需要等到被刷新到磁盘。ES 在数据量很大的情况下(数十亿级别)如何提高查询效率
性能优化的杀手锏——filesystem cache
你往 es 里写的数据,实际上都写到磁盘文件里去了,查询的时候,操作系统会将磁盘文件里的数据自动缓存到 filesystem cache 里面去。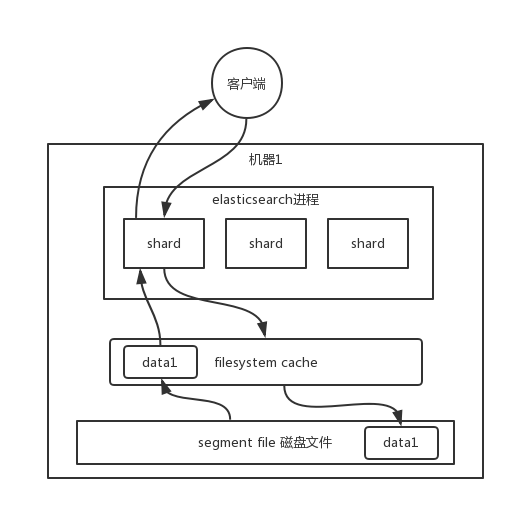
es 的搜索引擎严重依赖于底层的 filesystem cache ,你如果给 filesystem cache 更多的内存,尽量让内存可以容纳所有的 idx segment file 索引数据文件,那么你搜索的时候就基本都是走内存的,性能会非常高。
性能差距究竟可以有多大?我们之前很多的测试和压测,如果走磁盘一般肯定上秒,搜索性能绝对是秒级别的,1 秒、5 秒、10 秒。但如果是走 filesystem cache ,是走纯内存的,那么一般来说性能比走磁盘要高一个数量级,基本上就是毫秒级的,从几毫秒到几百毫秒不等。
数据预热
对于那些你觉得比较热的、经常会有人访问的数据,最好做一个专门的缓存预热子系统,就是对热数据每隔一段时间,就提前访问一下,让数据进入 filesystem cache 里面去。这样下次别人访问的时候,性能一定会好很多。
冷热分离
es 可以做类似于 mysql 的水平拆分,就是说将大量的访问很少、频率很低的数据,单独写一个索引,然后将访问很频繁的热数据单独写一个索引。最好是将冷数据写入一个索引中,然后热数据写入另外一个索引中,这样可以确保热数据在被预热之后,尽量都让他们留在 filesystem os cache 里,别让冷数据给冲刷掉。es深度分页
-
传统方式(from&size)
需要实时获取顶部的部分文档。例如查询最新的订单。
-
Scroll
用于非实时查询
需要全部文档,例如导出全部数据
-
Search After
用于实时查询
需要做到深度分页
es 生产集群的部署架构是什么?每个索引的数据量大概有多少?每个索引大概有多少个分片?
es 生产集群我们部署了 5 台机器,每台机器是 6 核 64G 的,集群总内存是 320G。
我们 es 集群的日增量数据大概是 2000 万条,每天日增量数据大概是 500MB,每月增量数据大概是 6 亿,15G。目前系统已经运行了几个月,现在 es 集群里数据总量大概是 100G 左右。
目前线上有 5 个索引,每个索引的数据量大概是 20G,所以这个数据量之内,我们每个索引分配的是 8 个 shard,比默认的 5 个 shard 多了 3 个shard。 -
-
相关阅读:
大一,小小练习题--含答案
无胁科技-TVD每日漏洞情报-2022-11-3
linux安装Vnc
思腾云计算
数据结构(4)树形结构——二叉树(概述、前序、中序、后序、层序遍历JAVA实现)
Python中字典的使用方法
Spring Security配置
真的,Java并发编程基础入门看这个就够了
机器学习(二):线性回归
字符设备驱动_1:基本概念和数据结构
- 原文地址:https://blog.csdn.net/javajy/article/details/127852341