-
PTV Vissim学习
PTV Vissim学习
- Vissim
- Vissim分布-期望速度
- Vissim分布-颜色-时间
- Vissim车辆类型&车辆类别
- Vissim驾驶行为&路段驾驶行为
- Vissim显示类型&层
- Vissim仿真参数
- Vissim背景底图
- Vissim路段&连接器
- Vissim如何规范地画路口
- Vissim车辆输入
- Vissim静态路线1
- Vissim解决车卡路口消失的问题
- Vissim静态路径2
- Vissim完善路口其他进口道
- Vissim冲突区域
- Vissim优先规则
- Vissim信号控制机
- Vissim信号机头
- Vissim减速区域&期望速度决策点
- Vissim停车标志&停车场&垂直式停车
- Vissim用户自定义属性&属性决策点
- Vissim公交车站&公交线路
Vissim
Vissim 是德国 PTV 公司提供的一款世界领先的微观交通流仿真软件。Vissim可以方便的构建各种复杂的交通环境,包括高速公路,大型环岛,停车场等,也可以在一个仿真场景中模拟包括机动车,卡车,有轨交通和行人的交互行为。它是专业的规划和评价城市和郊区交通设施的有效工具,也可以用来仿真局部紧急情况交通的影响,大量行人的疏散等。Vissim 的仿真可以达到很高的精度,包括微观的个体跟驰行为和变道行为,以及群体的合作和冲突。Vissim 内置了多种分析手段,既能获得不同情况下的多种具体数据结果,也可以从高质量的三维可视化引擎获得直观的理解。无人驾驶算法也可以通过接入 Vissim 的方式使用模拟的高动态交通环境进行仿真测试。
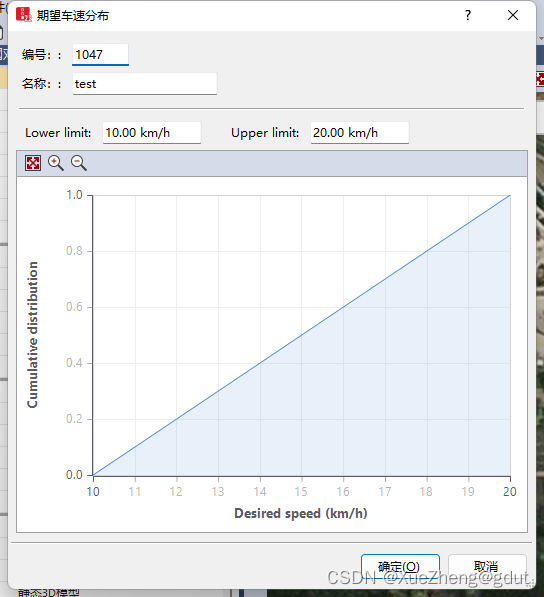
Vissim分布-期望速度

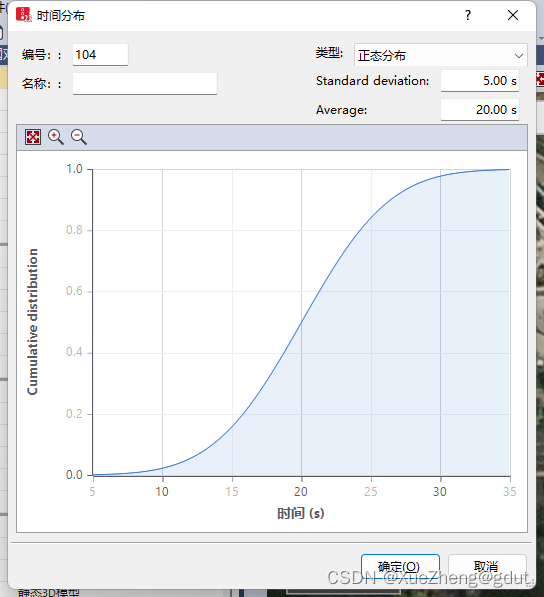
Vissim分布-颜色-时间
颜色显示。
时间分布:公交车到站停车时间;车经过收费口;停车场停车时间。
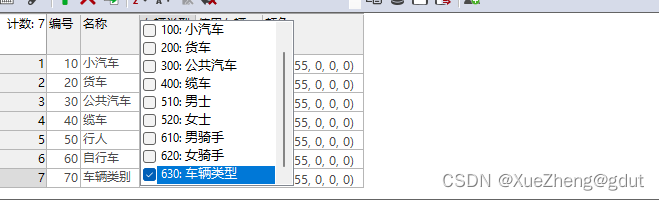
Vissim车辆类型&车辆类别
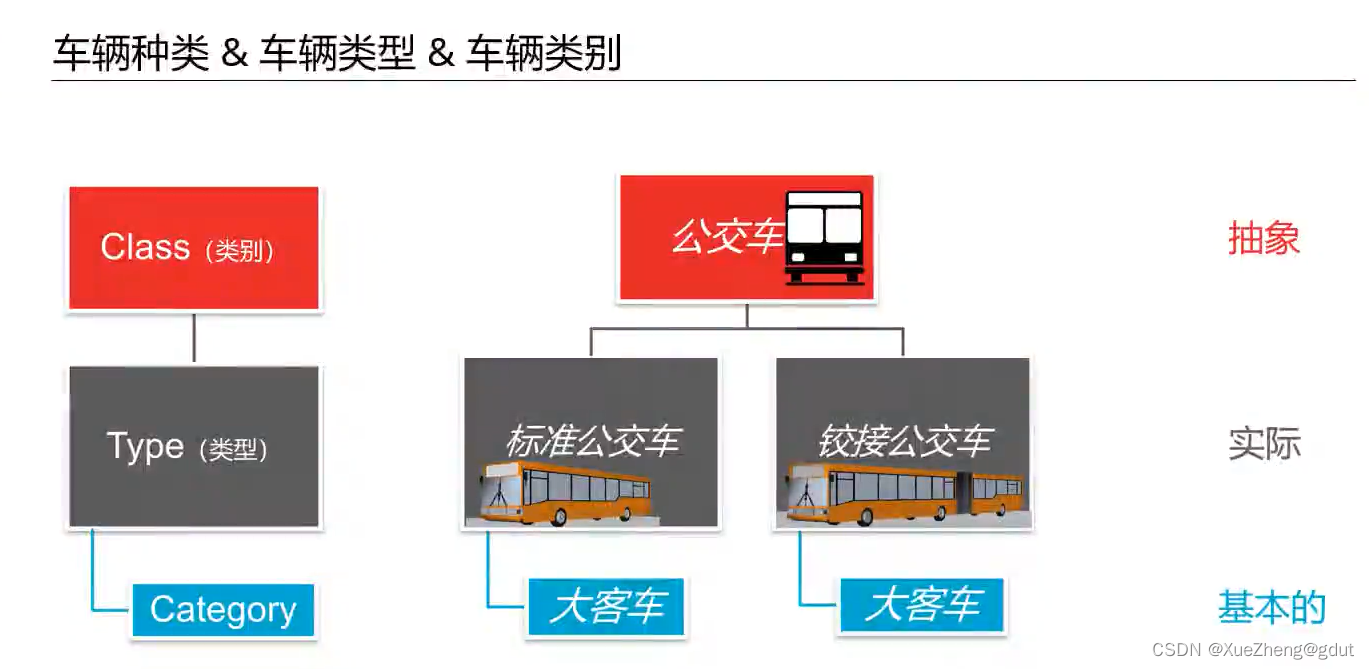
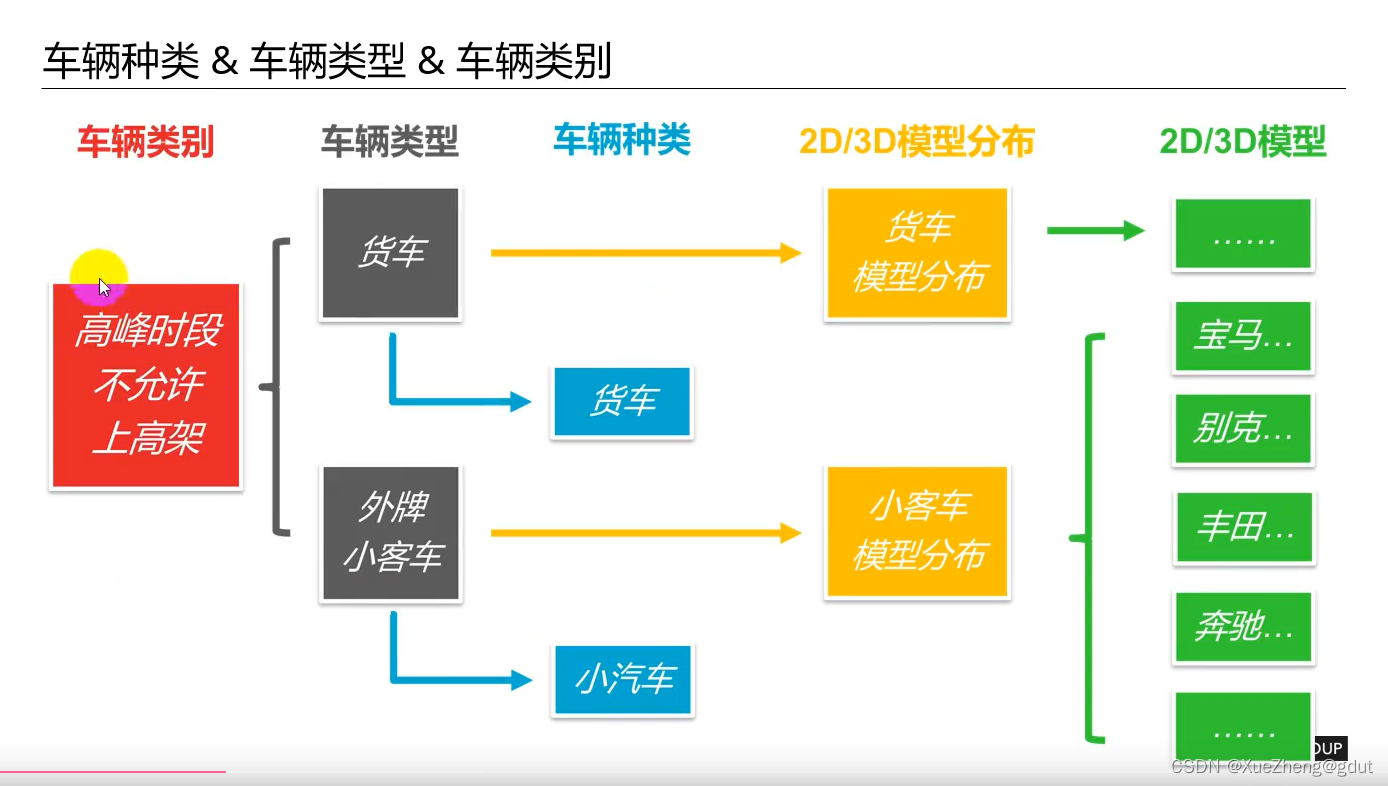
设置的时候是从右往左的。
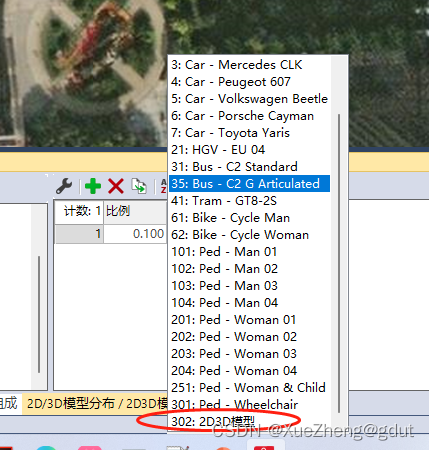
添加2D3D模型:
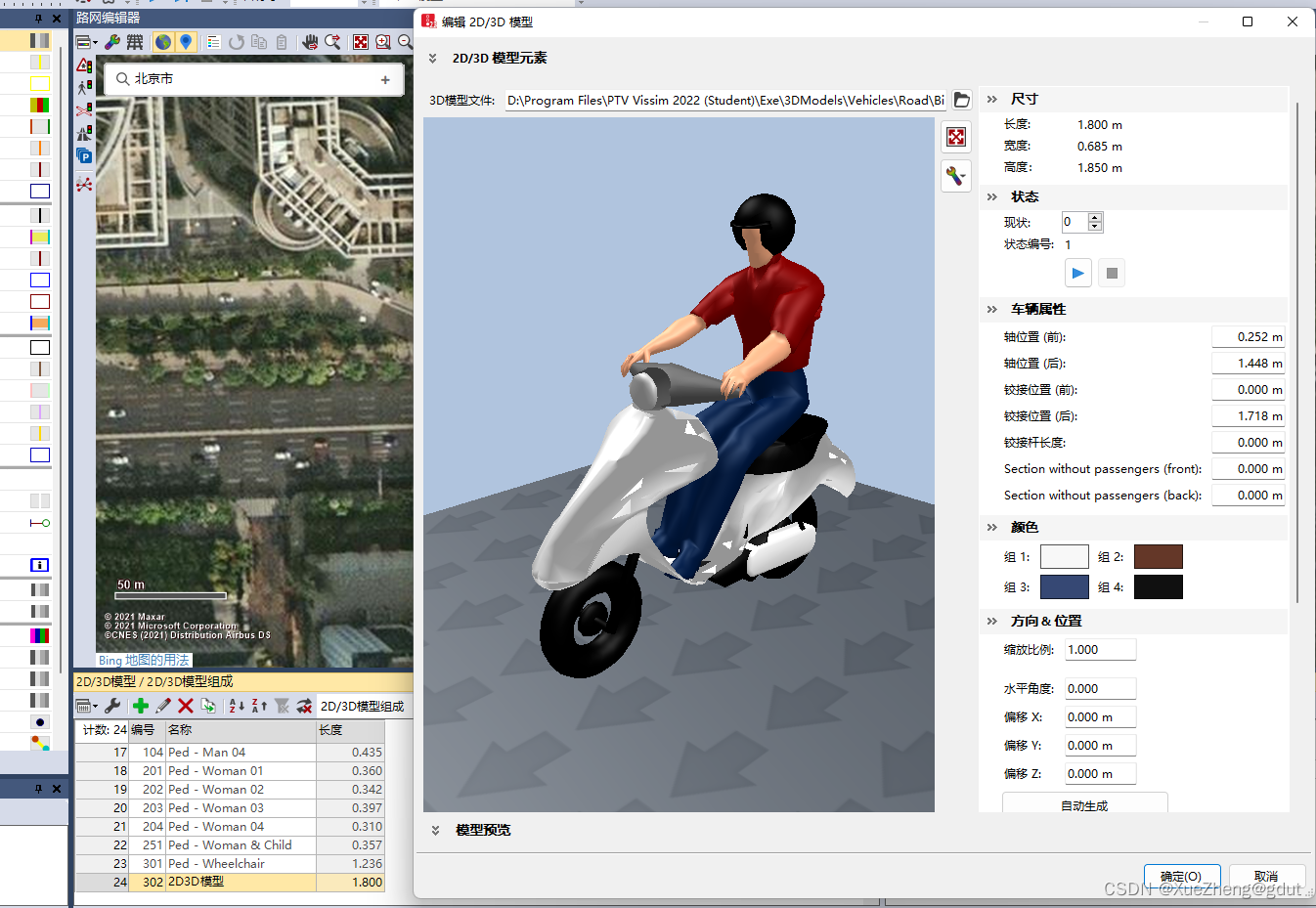
加一个分布:

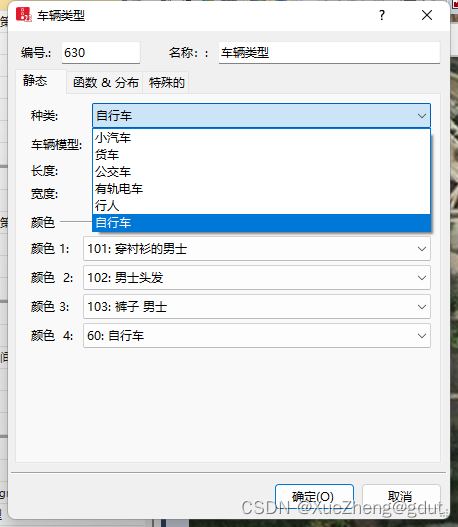
车辆类型:
车辆种类共六种。
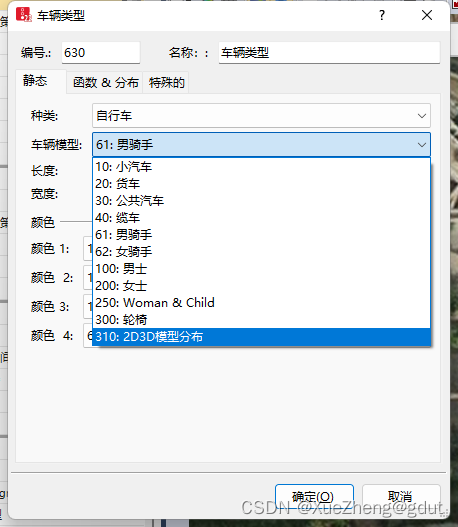
接下来定义车辆类别:
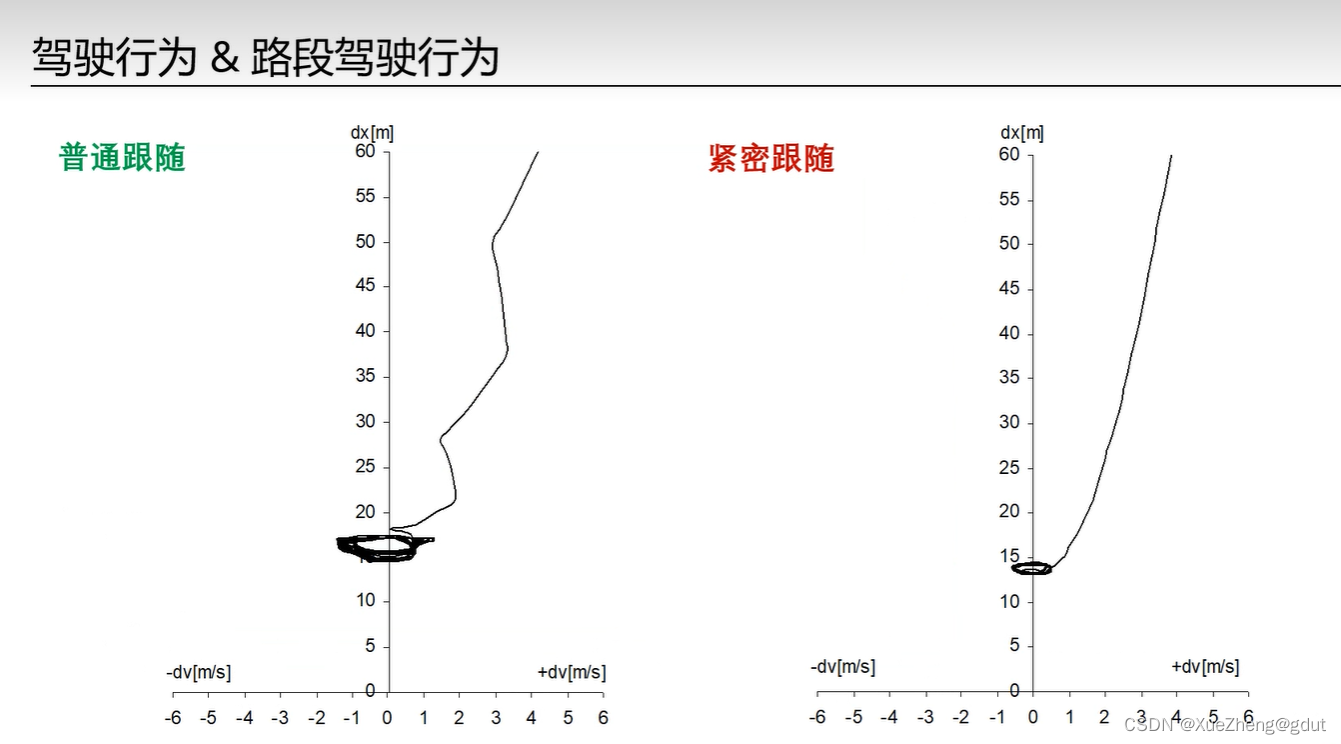
Vissim驾驶行为&路段驾驶行为
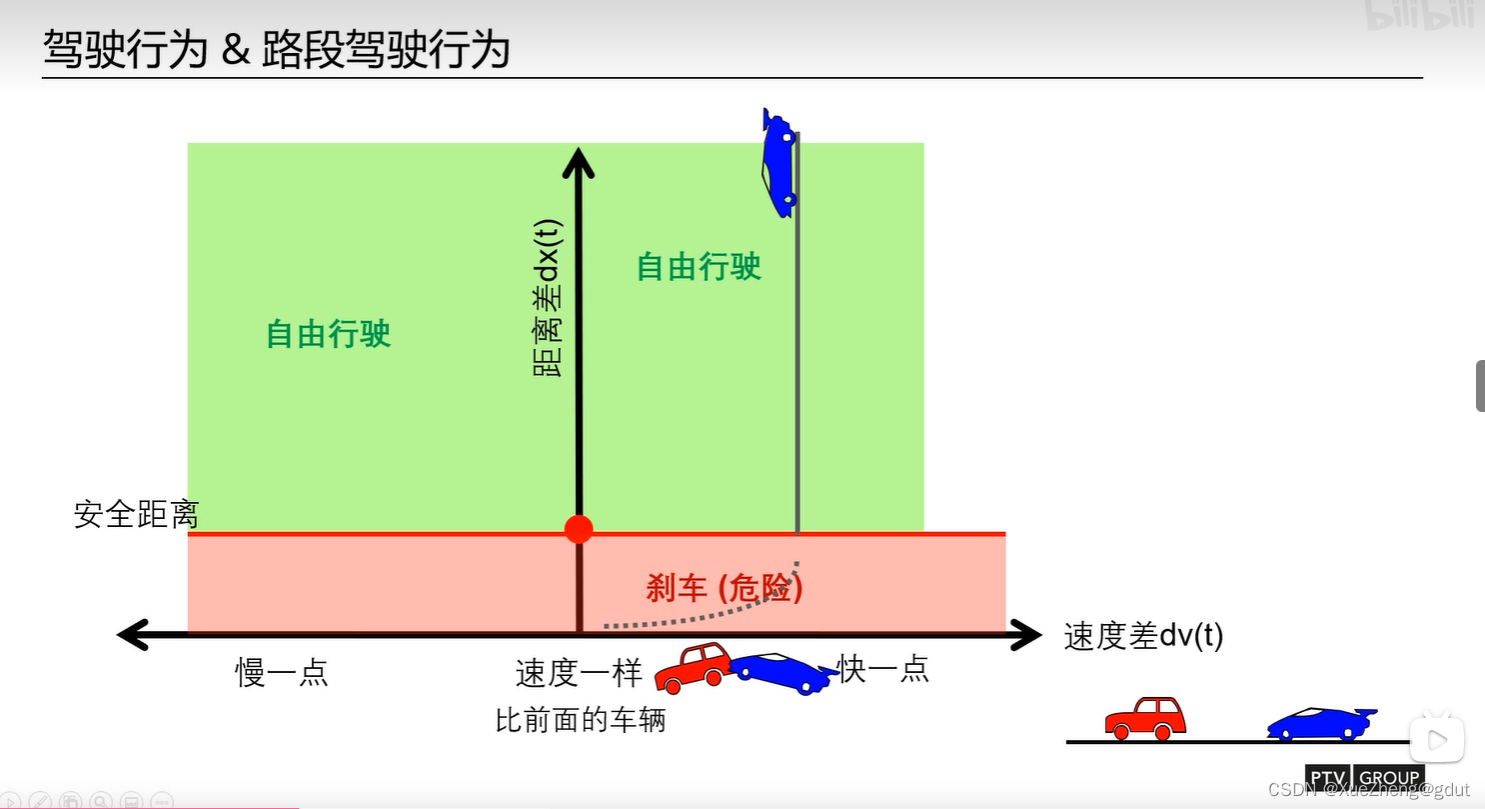
跟车模型:
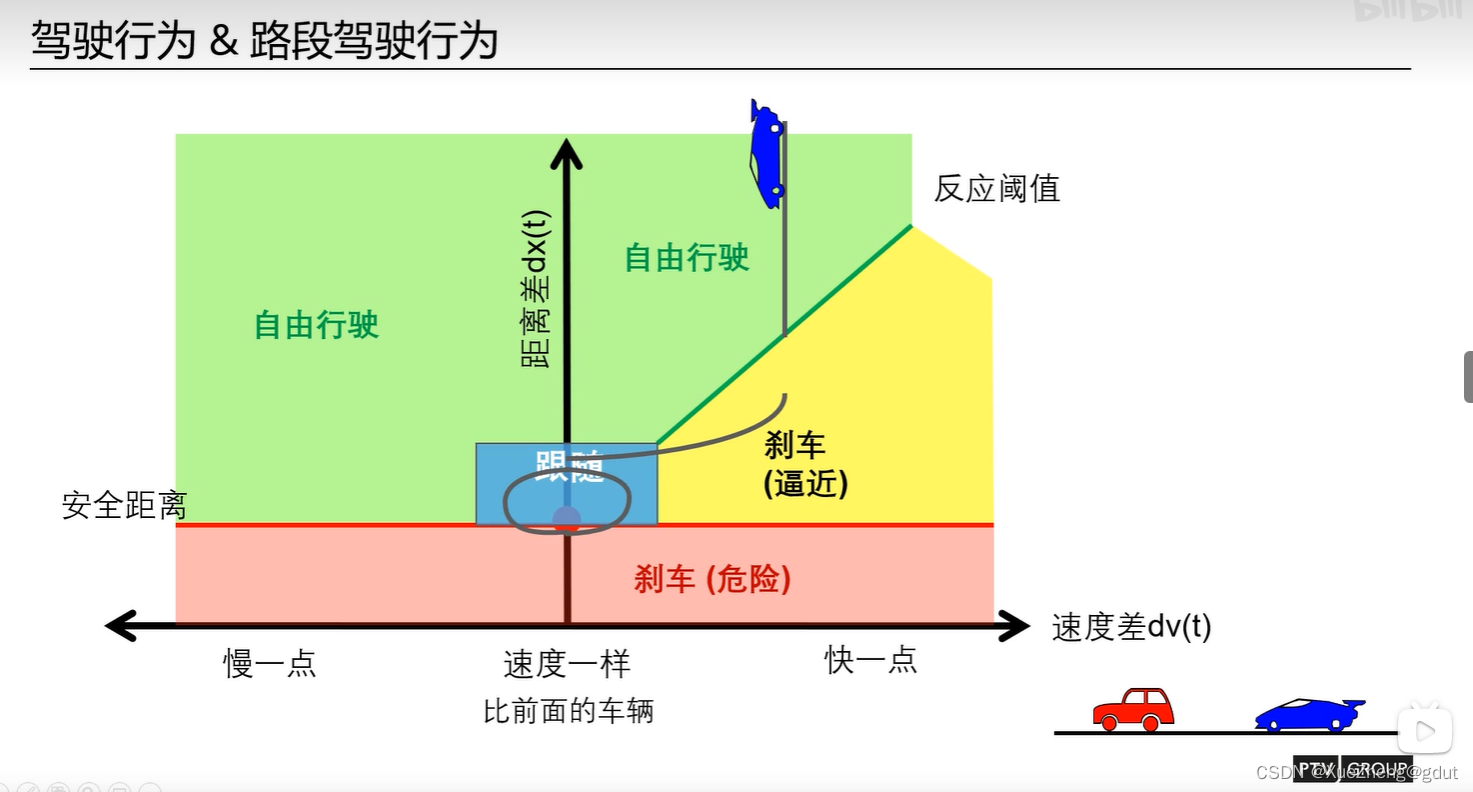
默认为机非混行-机动车驾驶行为,右边专门针对自行车设置机非混行-非机动车驾驶行为。

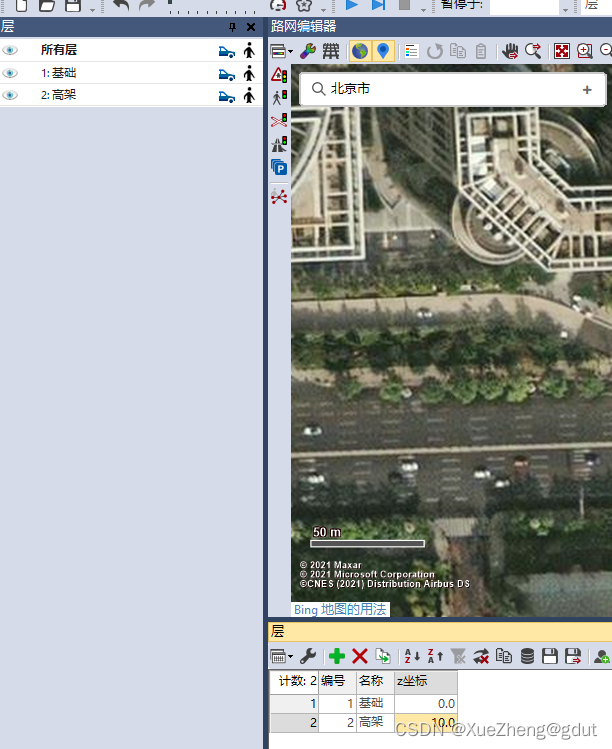
Vissim显示类型&层
控制显示优先级。

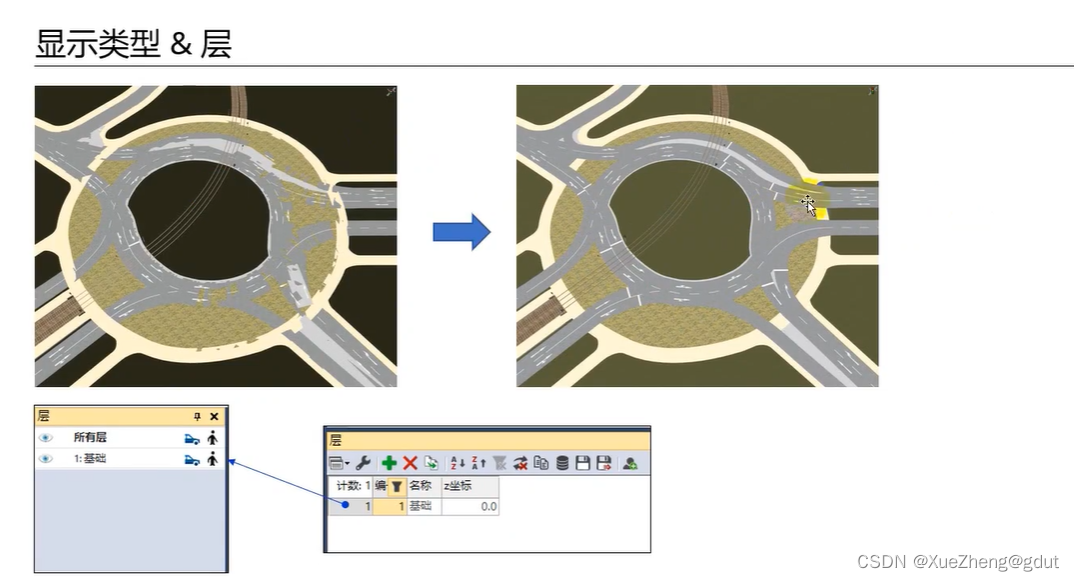
控制某一层是否显示,设定层高。
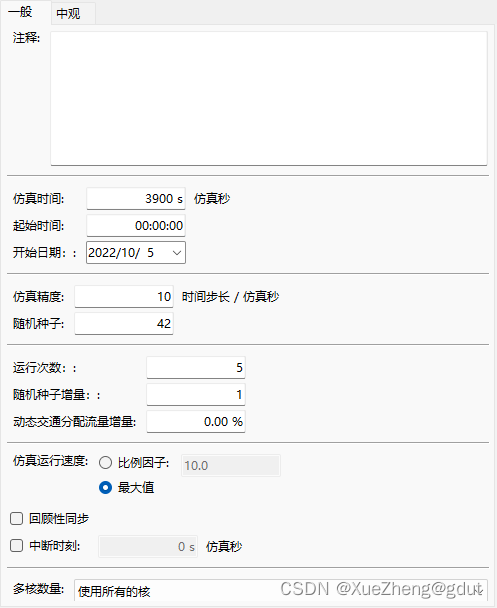
Vissim仿真参数
基本数据准备的差不多后,设置仿真参数。
根据路网范围不同设定,预留预热时间,车辆充分到达设定路网。
仿真精度:一个仿真秒内计算车辆位置的次数。越大车辆运行更加平顺。
Vissim背景底图
可以开始建模了。
铺一张图纸。
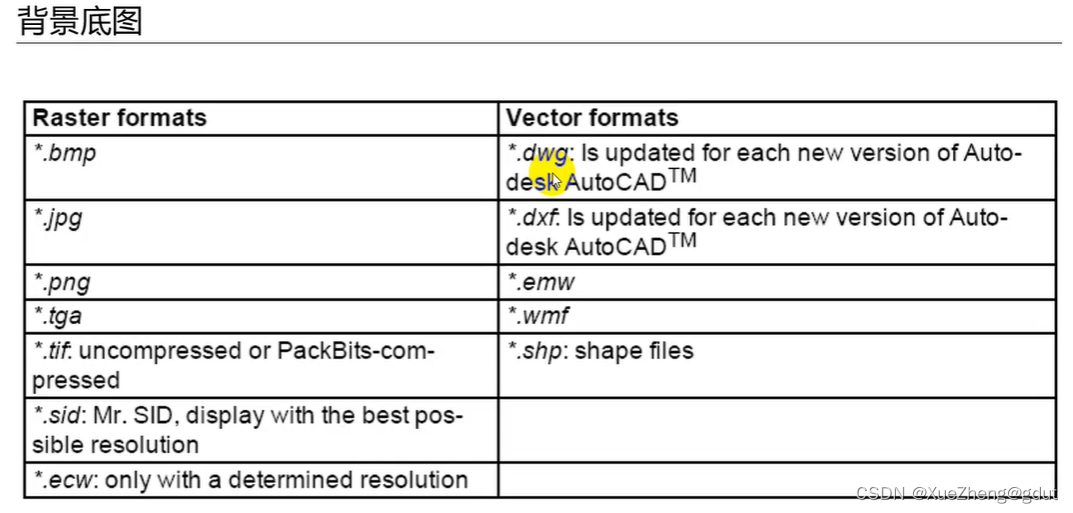
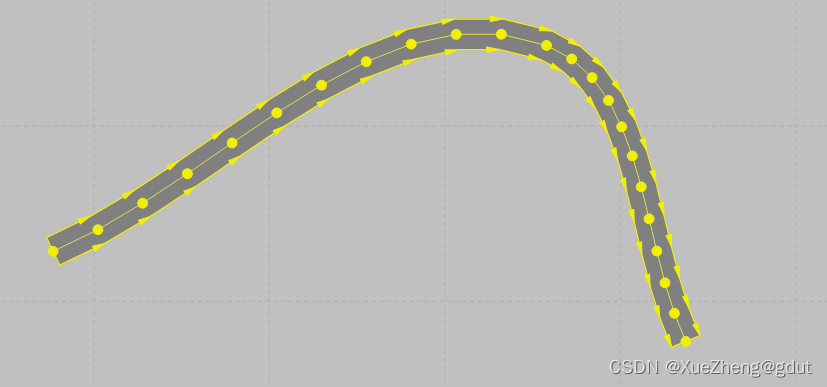
导入底图Vissim路段&连接器
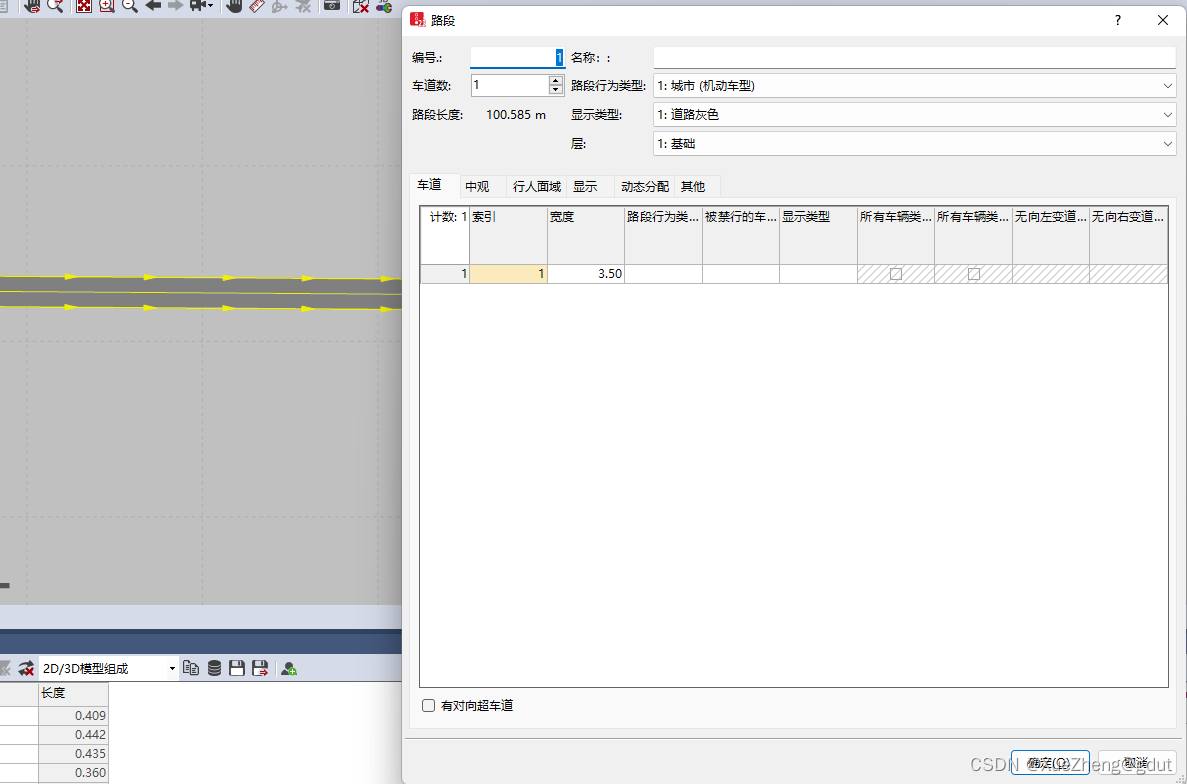
生成平滑点:alt+鼠标

复制:ctrl+鼠标左键拖动
连接器:

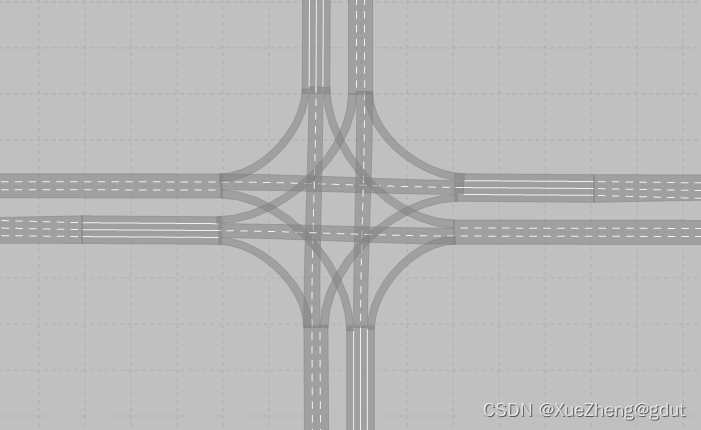
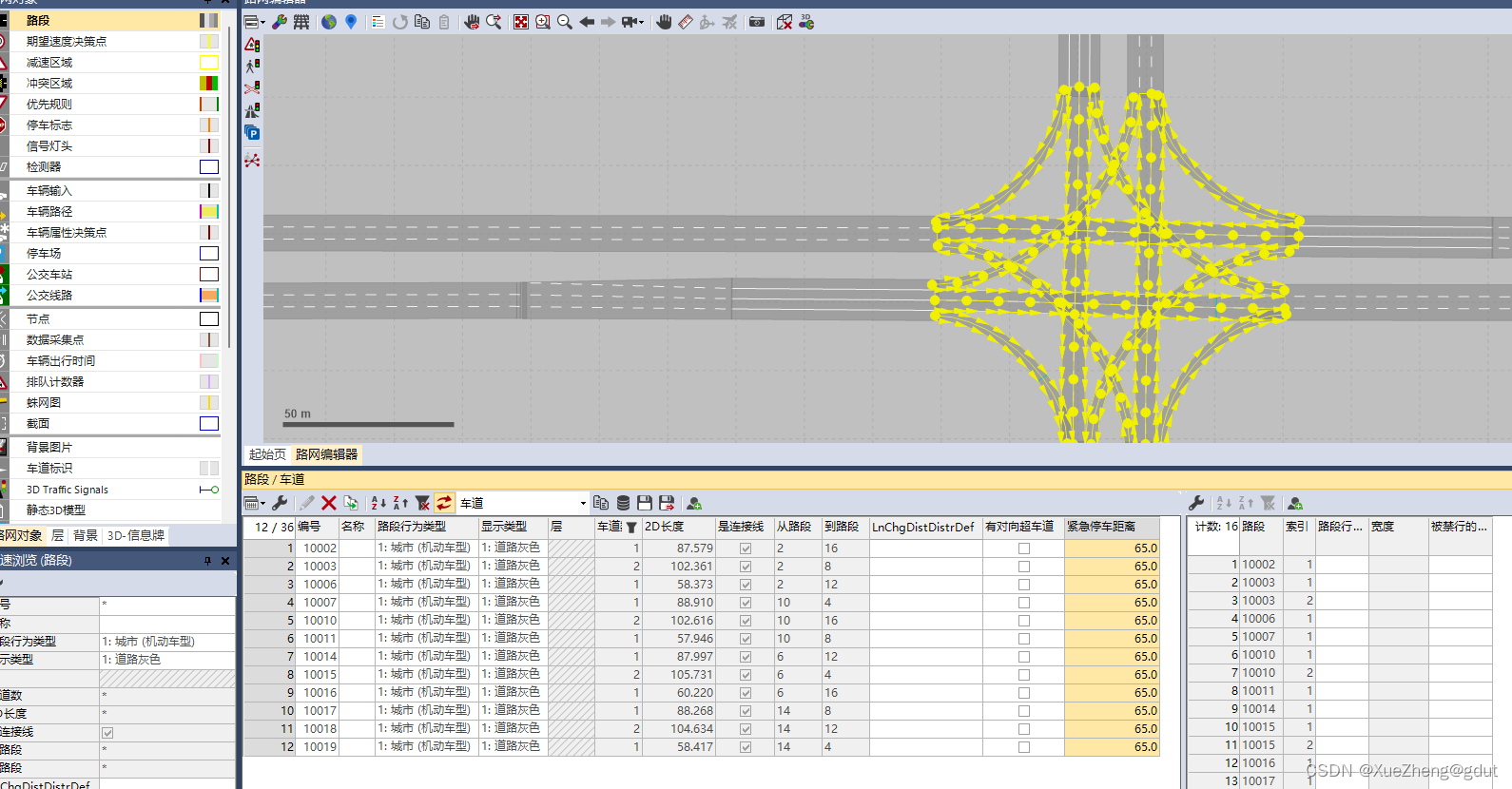
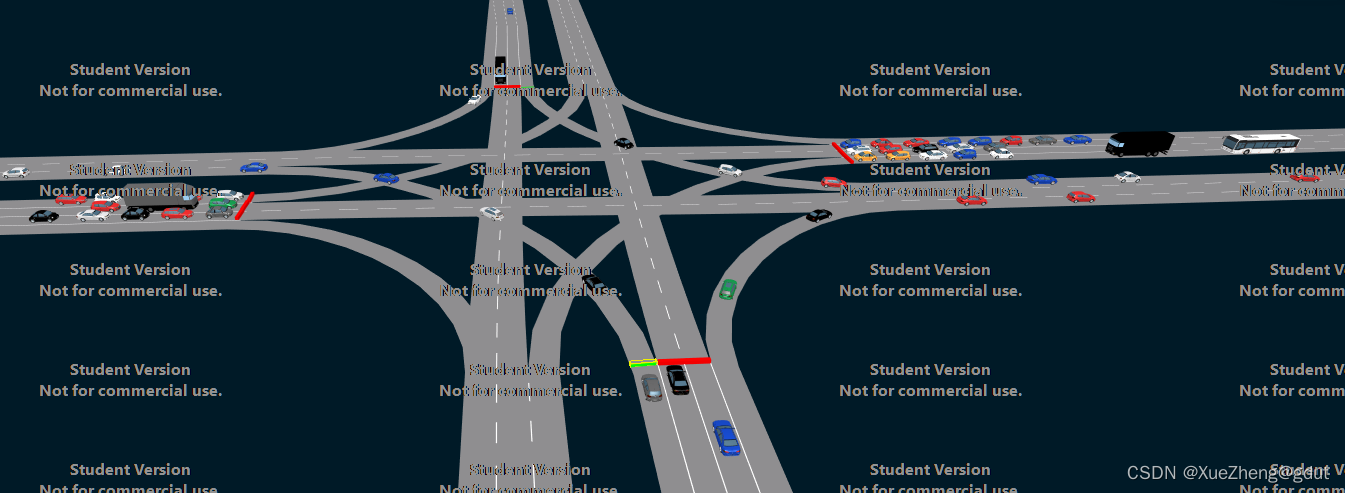
Vissim如何规范地画路口
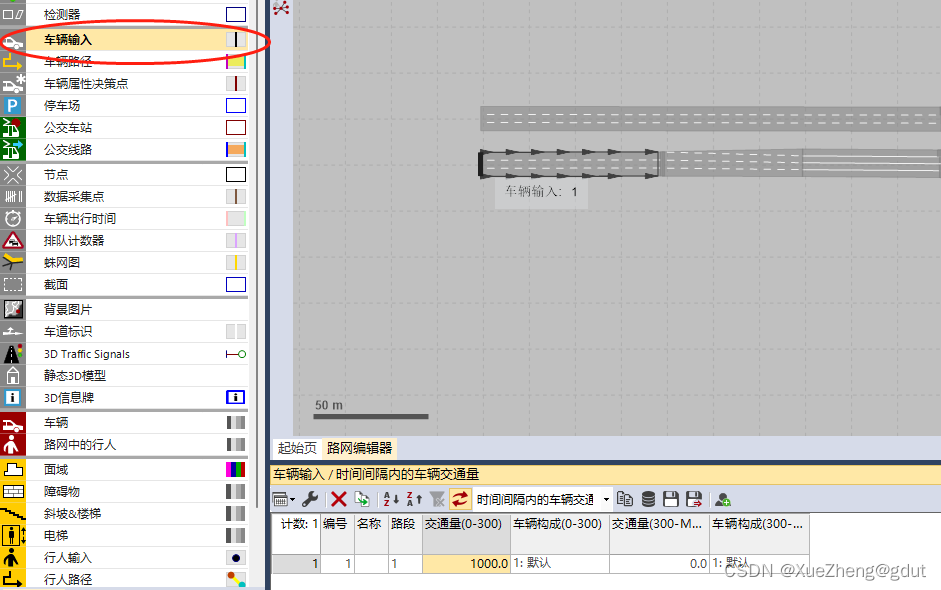
Vissim车辆输入
车辆组成:对进入的车流组成进行定义。
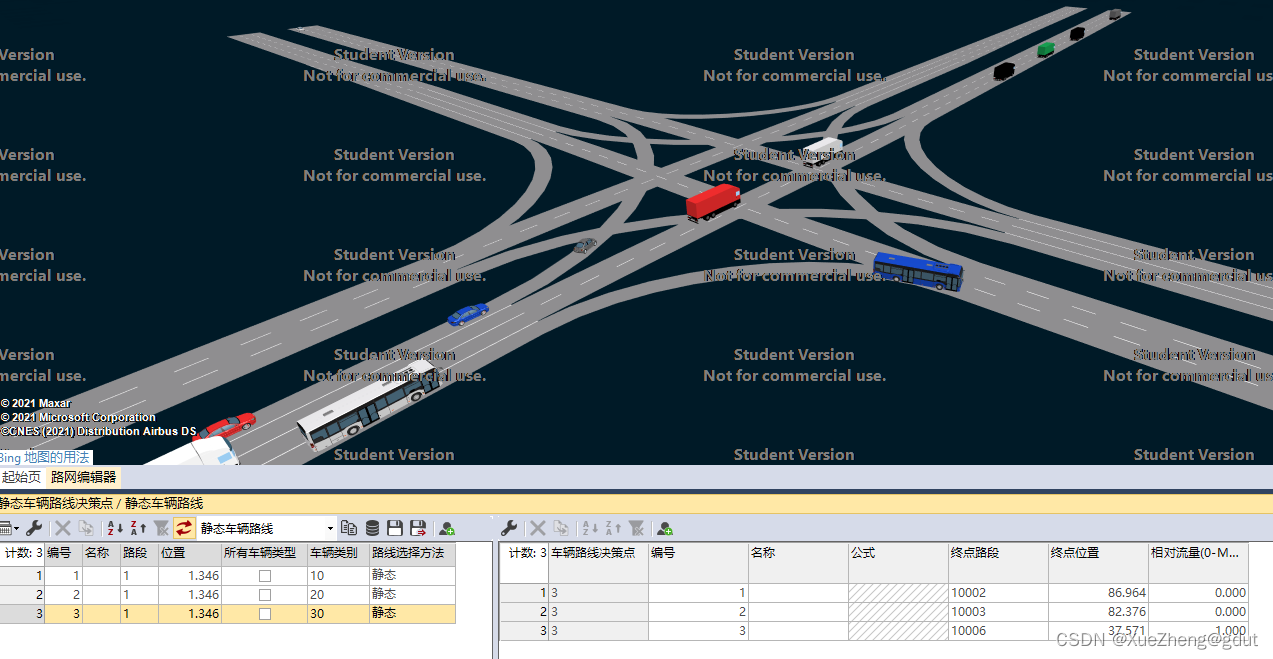
Vissim静态路线1
设置路径选择,转向比。

Vissim解决车卡路口消失的问题
Vissim静态路径2
不同类型车辆定义路线。
Vissim完善路口其他进口道

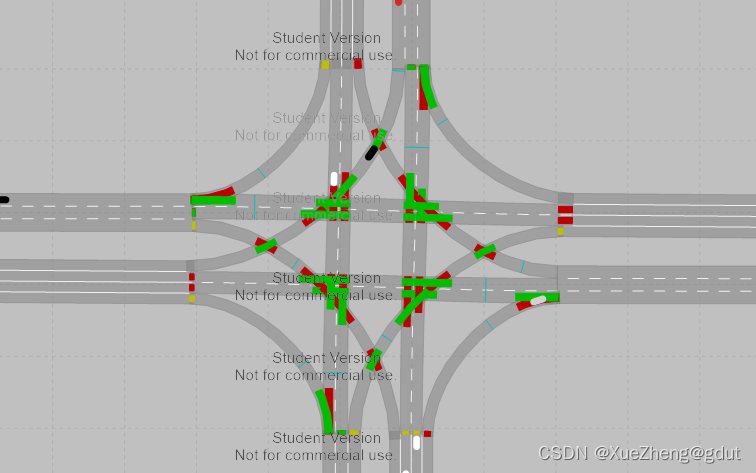
Vissim冲突区域
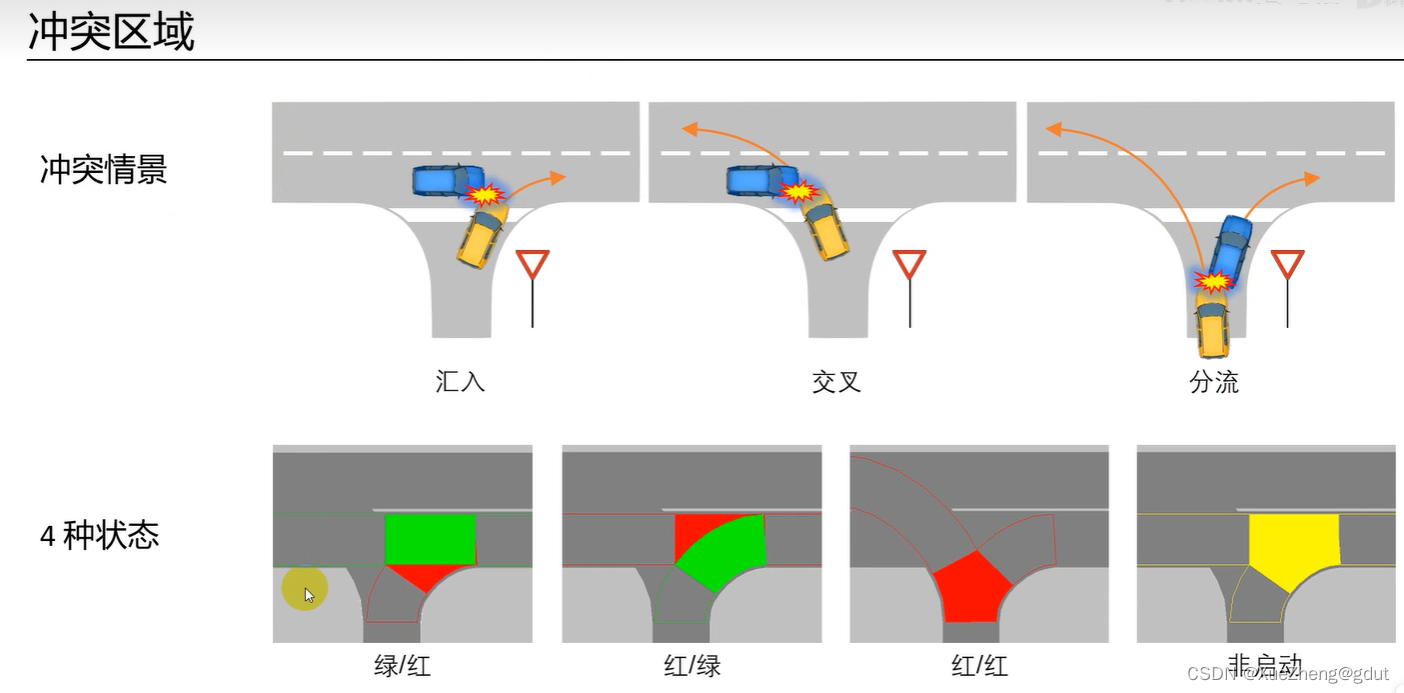
红/红:谁先到谁走;非启动:不会互相识别,出现碰撞情况。
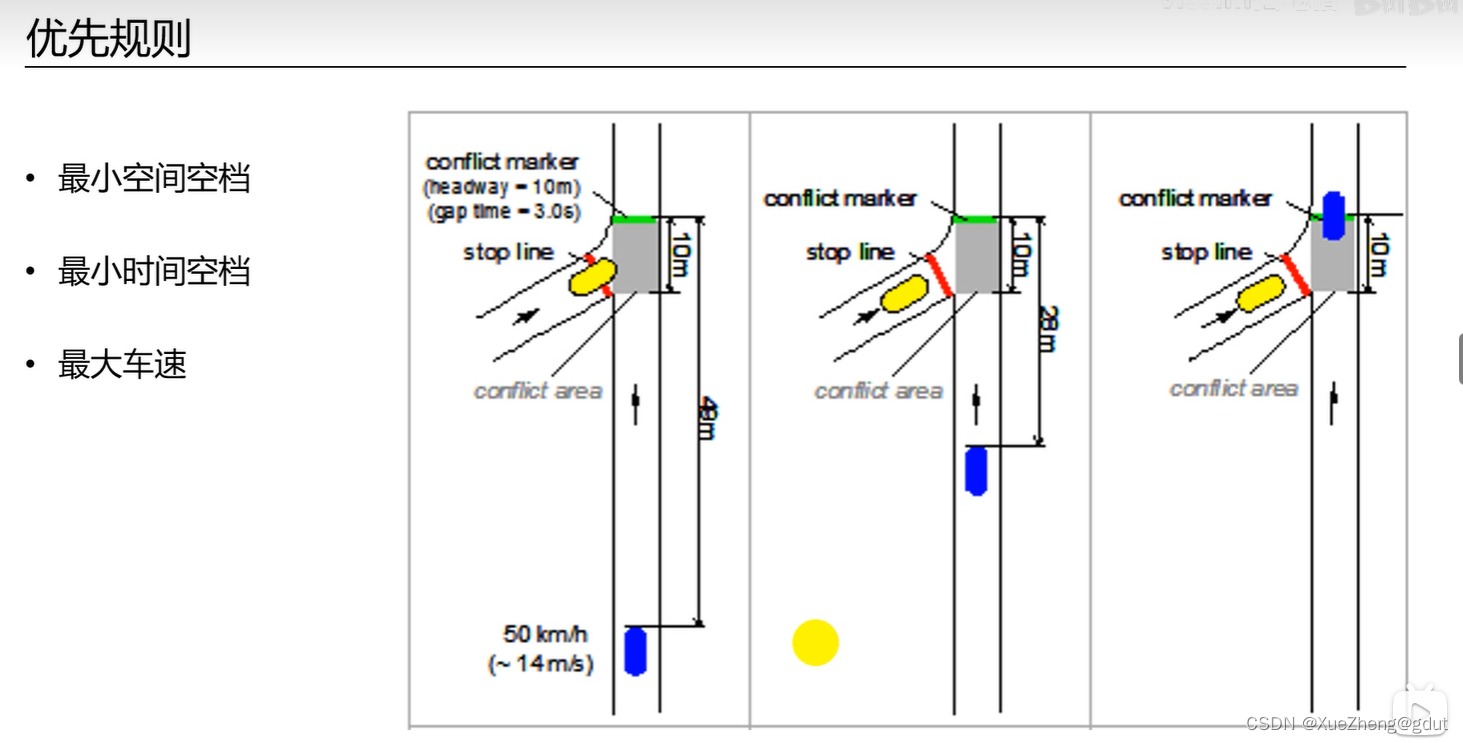
Vissim优先规则
推荐使用冲突区域,若无法达到效果,则使用优先规则。
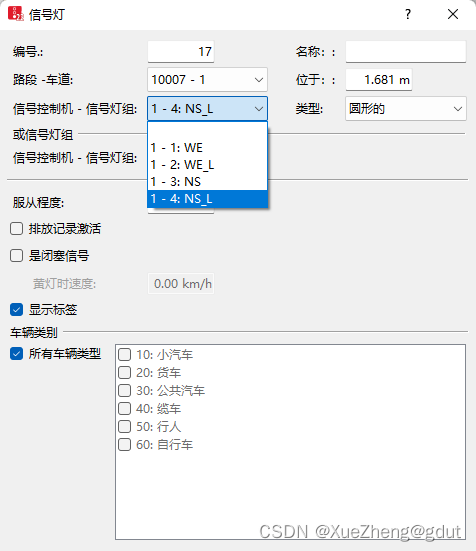
Vissim信号控制机
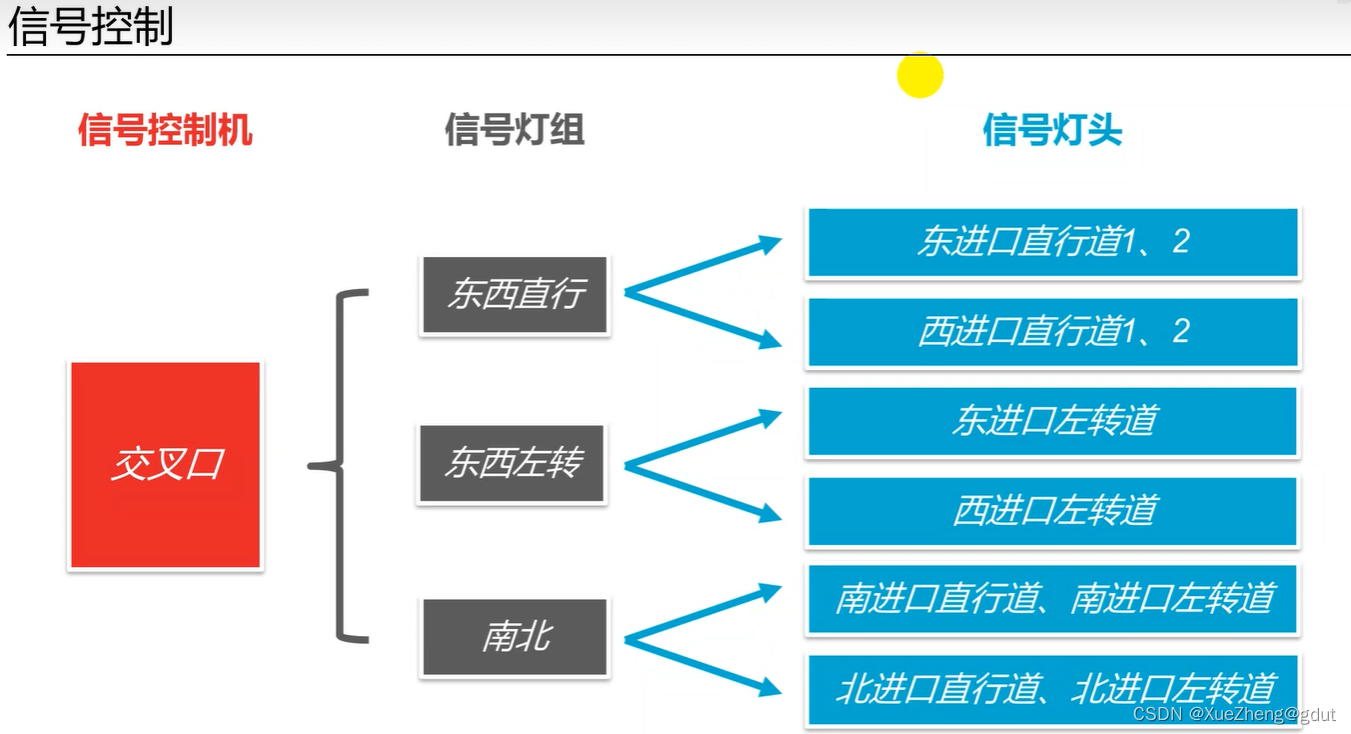
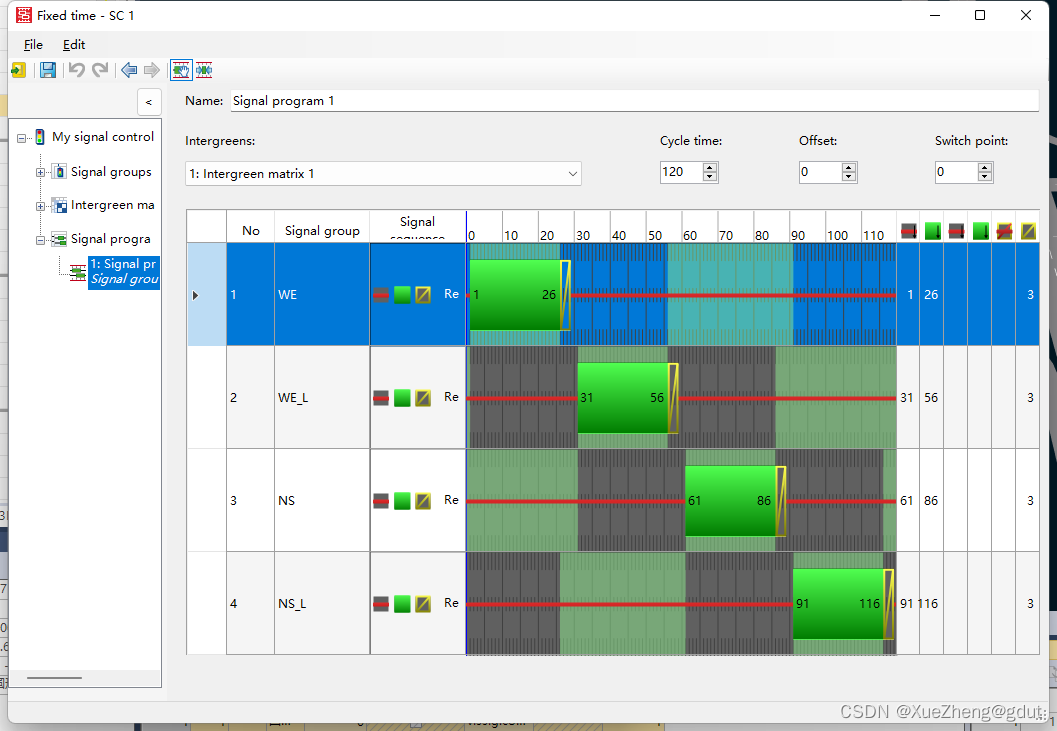
Vissim信号机头
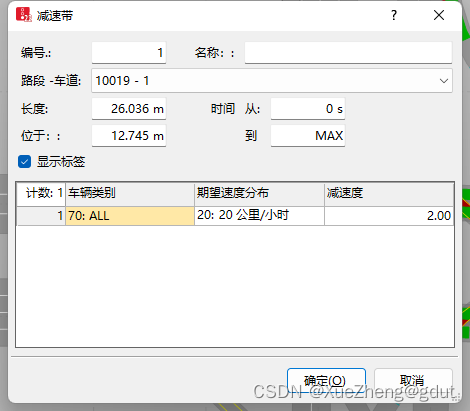
Vissim减速区域&期望速度决策点

Vissim停车标志&停车场&垂直式停车
Vissim用户自定义属性&属性决策点
Vissim公交车站&公交线路

-
相关阅读:
SignalR 入门
软件测试技术之如何编写测试用例(5)
3D虚拟情景实训系统在英语课堂教学中的应用
C#实现顺序表定义、插入、删除、查找操作
单片机论文参考:2、基于单片机的病床呼叫系统设计
6_显示登录信息以及上传图片
zabbix监控部署keepalived高可用
【软件测试进阶第1步】自动化测试基础知识
RoadBEV:鸟瞰图中的道路表面重建
【CVPR 2022】QueryDet:加速高分辨率小目标检测
- 原文地址:https://blog.csdn.net/weixin_43835470/article/details/127176097