-
RoadBEV:鸟瞰图中的道路表面重建
1. 代码地址
GitHub - ztsrxh/RoadBEV: Codes for RoadBEV: road surface reconstruction in Bird's Eye View
2. 摘要
本文介绍了RoadBEV:鸟瞰图中的道路表面重建。道路表面条件(特别是几何形状)极大地影响了自动驾驶汽车的驾驶性能。基于视觉的在线道路重建有望提前获取道路信息。现有的解决方案(例如单目深度估计和双目匹配)性能较差。最新的鸟瞰图(BEV)感知为更可靠、更精确的重建提供了巨大的潜力。本文统一地提出了两种简单而有效的BEV道路高程重建模型,称为RoadBEV-mono和RoadBEV-stereo,其分别使用单目和双目图像来估计道路高程。前者基于从图像中查询的体素特征直接拟合高程值,而后者基于表示左右体素特征之间差异的BEV体积来有效识别道路高程模式。精辟的分析证明了它们与透视图的一致性和差异性。在现实世界数据集上的实验验证了模型的有效性和卓越性。RoadBEV-mono和RoadBEV-stereo的高程误差分别达到1.83cm和0.56cm。在基于单目图像的BEV中,估计性能提高了50%。本文所提出的模型具有良好的实际应用前景,为自动驾驶中基于视觉的BEV感知提供了有价值的参考。
3. 主要贡献

本文的贡献总结如下:
- 本文首次通过分析和实验证明了在BEV中实现道路表面重建的必要性和优越性;
- 对于基于单目和双目的方案,本文相应地提出了两个模型,称为RoadBEV-mono和RoadBEV-stereo,并且详细地解释了它们的机制;
- 本文全面测试和分析了所提出模型的性能,为未来研究提供了有价值的见解和前景。
4. 数据集与预处理

5. 方法
5.1. 特征体素与高度回归


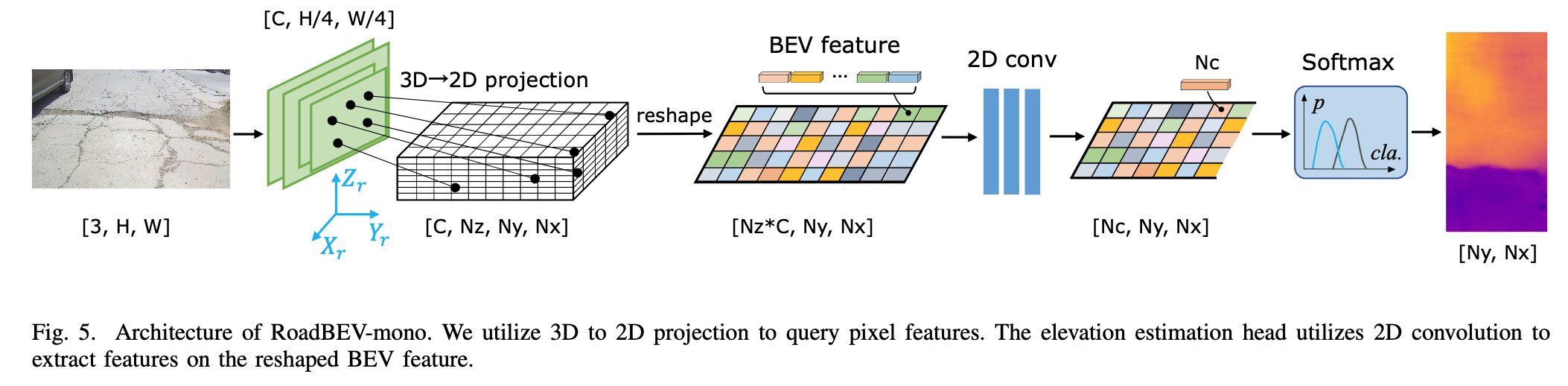
5.2. RoadBEV-mono
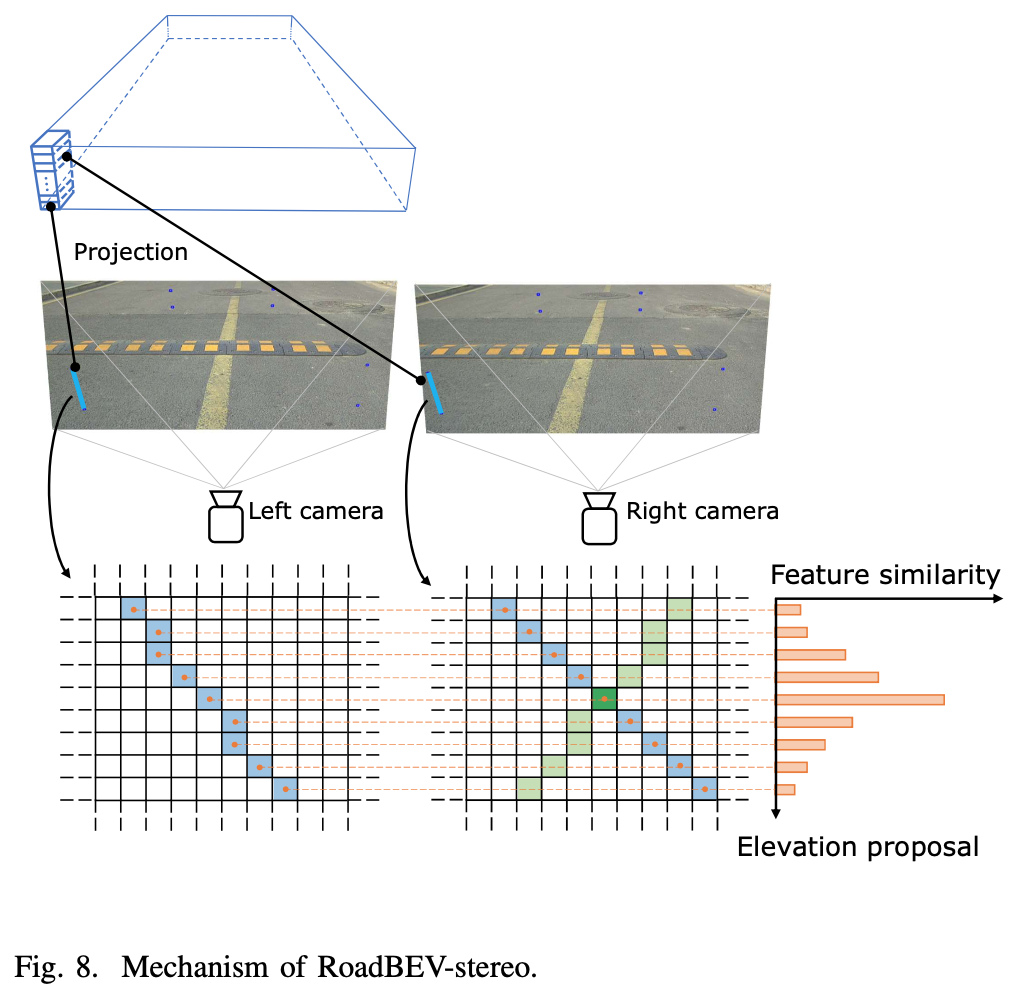
5.3. RoadBEV-stereo


5.4. 损失函数
6. 实验
6.1. 实验细节

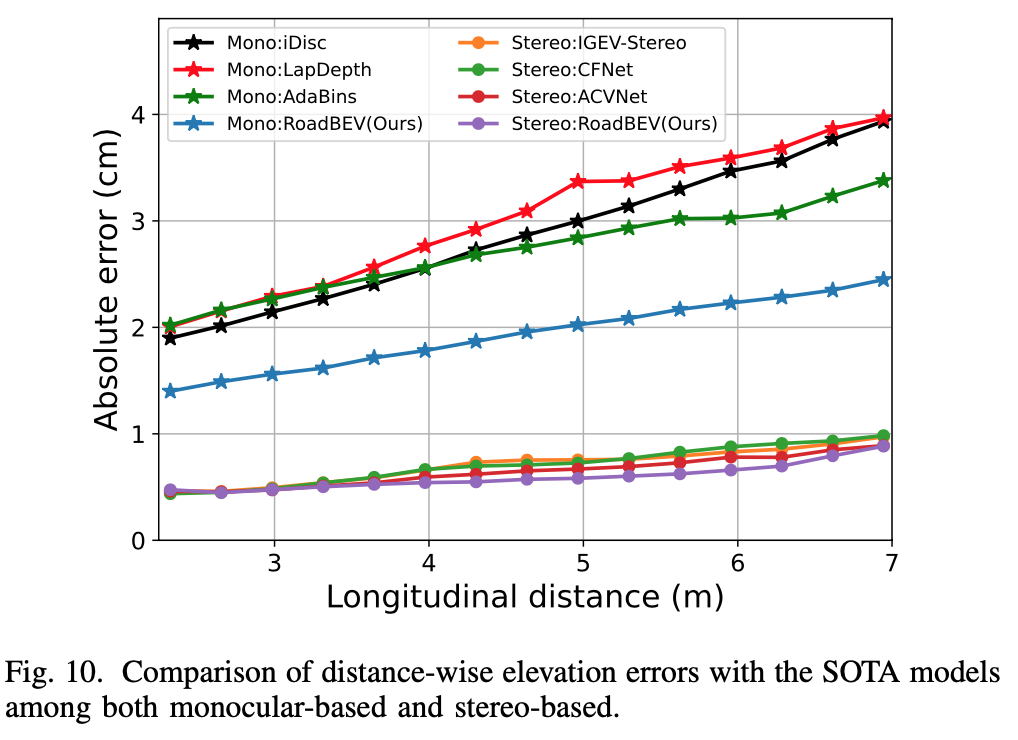
6.2. 性能与对比

6.3. 路面重建可视化


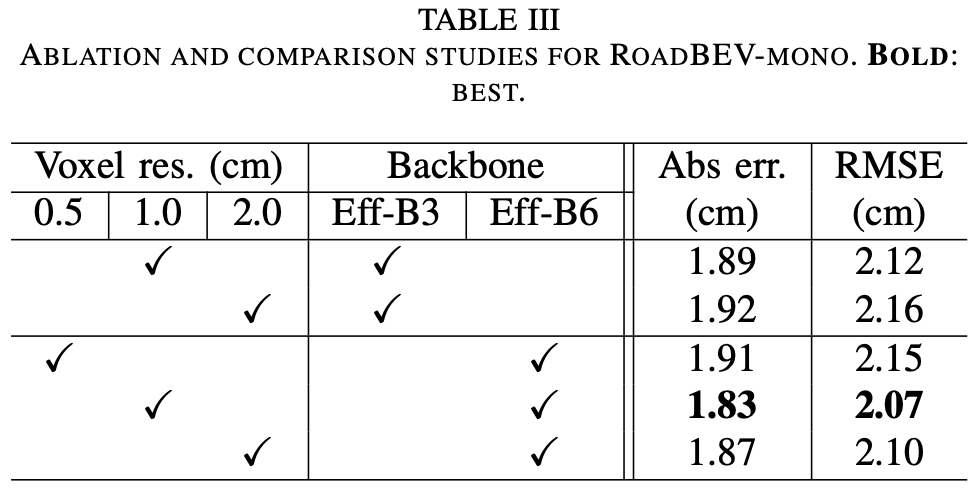
6.4. RoadBEV-mono消融实验

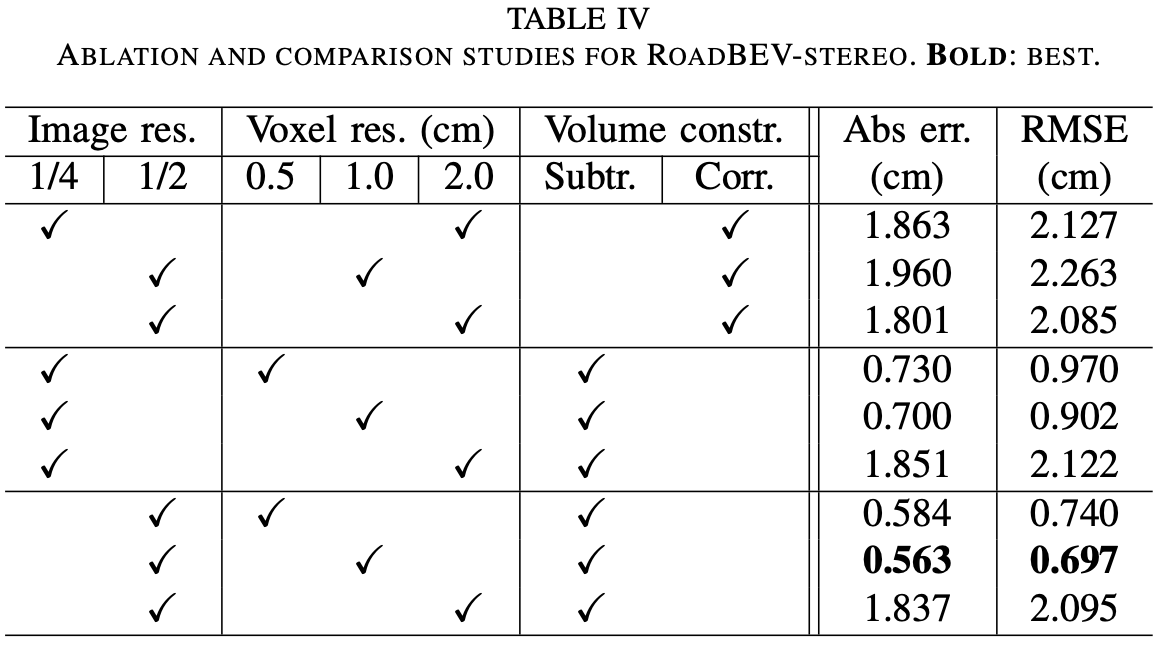
6.5. RoadBEV-stereo消融实验
7. 总结
本文首次在鸟瞰图中重建道路表面高程,分别提出并且分析了基于单目和双目图像的RoadBEV-mono和RoadBEV-stereo。本文揭示了BEV中单目估计和双目匹配与透视图中的机制相同,但是可以通过缩小搜索范围和直接在高程方向上挖掘特征来改进。在现实世界数据集上进行的全面实验验证了所提出的BEV体积、估计头和参数设置的可行性和优越性。对于单目相机,BEV的重建性能比透视图的重建性能提高了50%。同时,在BEV中,使用双目相机的性能是使用单目相机的三倍。本文提供了有关模型的深入分析,其开创性的探索也为BEV感知、3D重建和3D检测的进一步研究和应用提供了有价值的参考。
参考文献
RoadBEV: Road Surface Reconstruction in Bird’s Eye View
-
相关阅读:
【接口测试】HTTP接口详细验证清单
C++基础知识要点--字符串、向量和数组
计数排序【java实现】
蓝牙耳机什么牌子好?安卓蓝牙耳机性价比推荐
Kali渗透测试_WebShell
06 Spring_AOP
linux套接字选项API
视频监控系统/安防监控/视频AI智能分析:小动物识别算法场景汇总
轻量级软件FastGithub实现稳定访问github
项目成本控制如何帮助项目成功?
- 原文地址:https://blog.csdn.net/xhtchina/article/details/137711984