-
不确定度 Uncertainty
对之前看的不确定度·做一个总结。
首先是第一篇文章:Sparse and noisy LiDAR completion with RGB guidance and uncertainty
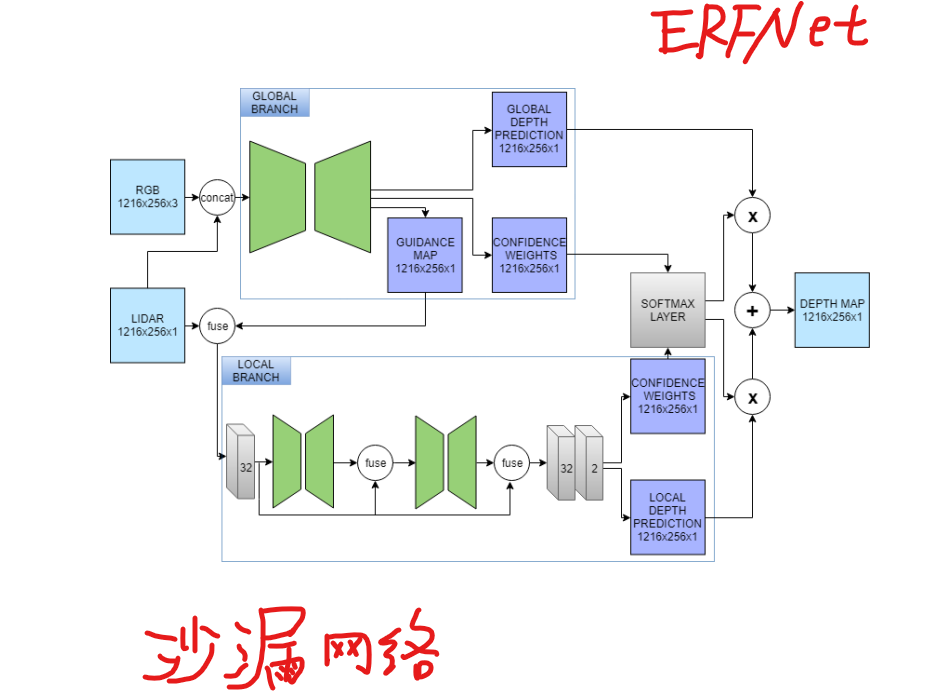
作者在3.2说:在全局和局部分支都用到了不确定性,框架的两个部分都预测了一个置信度图,而置信度图对最终的融合就像是一个权重,因此这个权重是对图片中每一个像素都加权,并且通过无监督学习,基于学习到的置信度权重,不确定度就会对确定的输入类型更多的注意力。对于准确的lidar图像,局部网络将会产生带有高置信度的深度预测,对于不正确或者缺少的lidar数据,全局信息将会被使用,比如物体的边界。
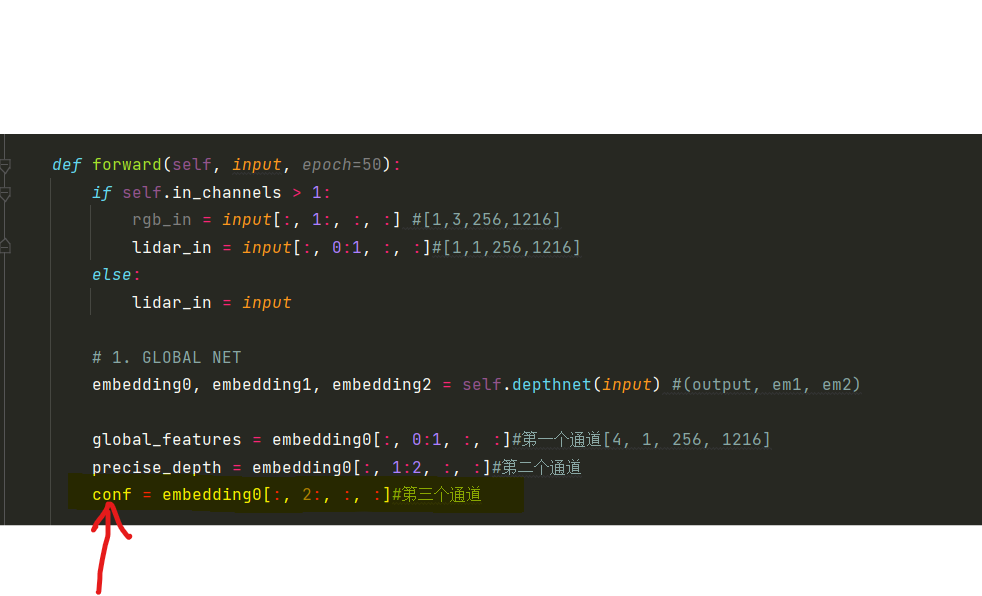
在代码中表现为:1:如何产生的?2:如何使用的?
置信图一般由softmax产生。
global产生的置信图是由ERFNet产生的结果图按维度取切片。
**local产生的置信图:**是由沙漏结构产生的结果在维度方向上进行切分。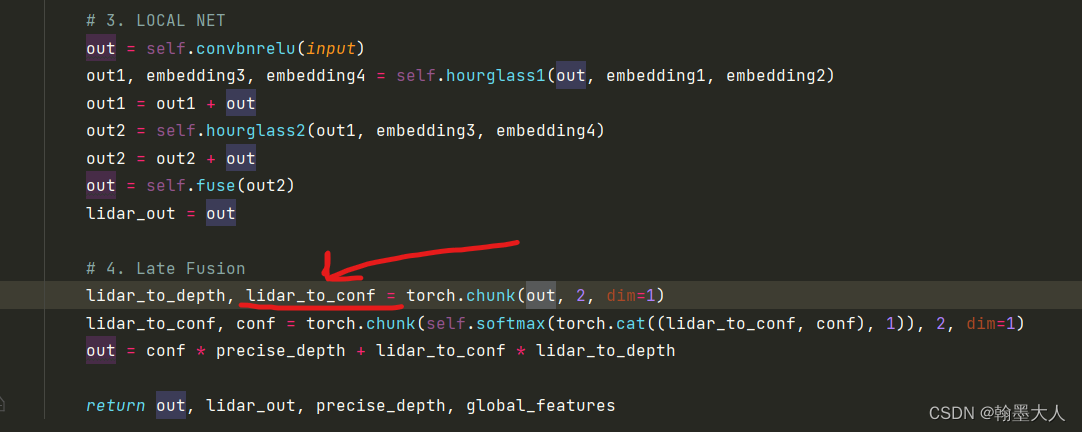
最终产生的置信图经过softmax拼接之后再进过softmax,产生的权重分别对两个框架产生的输出图进行加权。
第二篇是:UACANet: Uncertainty Augmented Context Attention for Polyp Segmentation
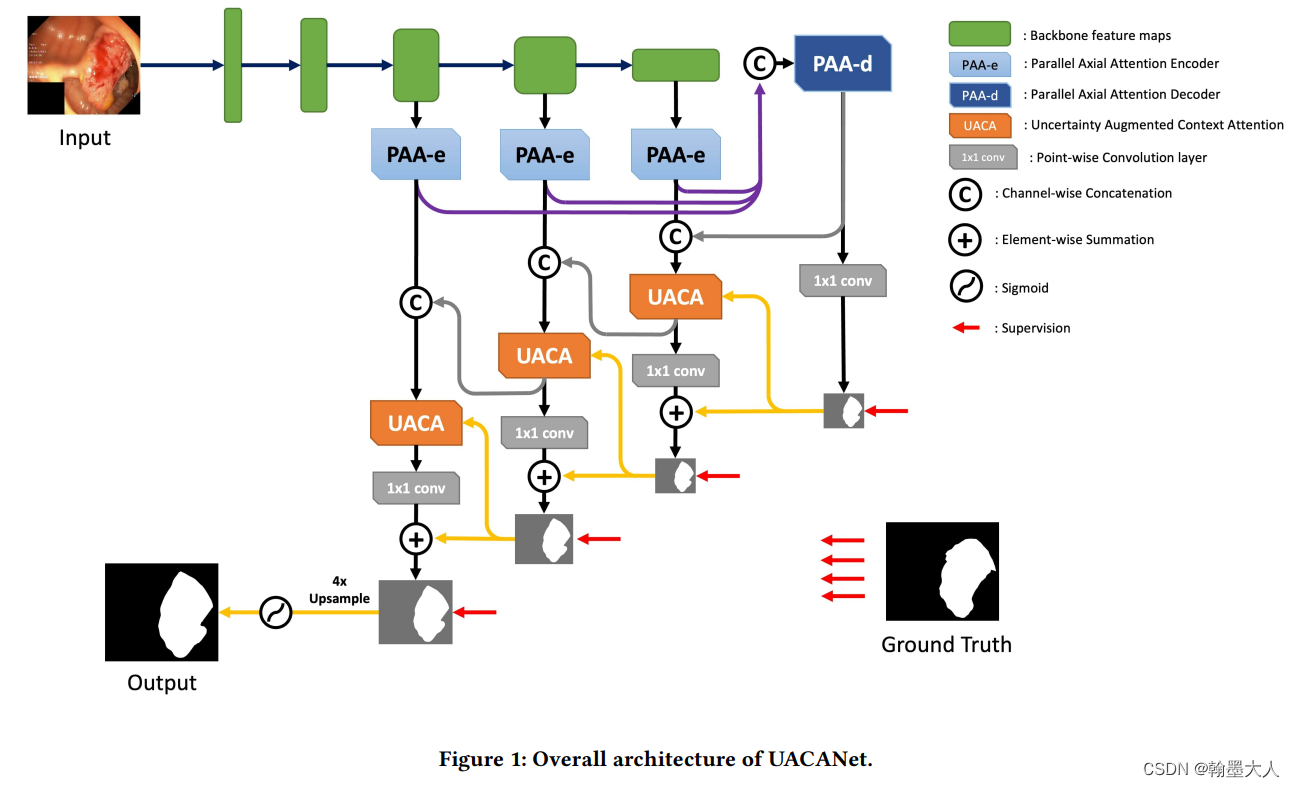
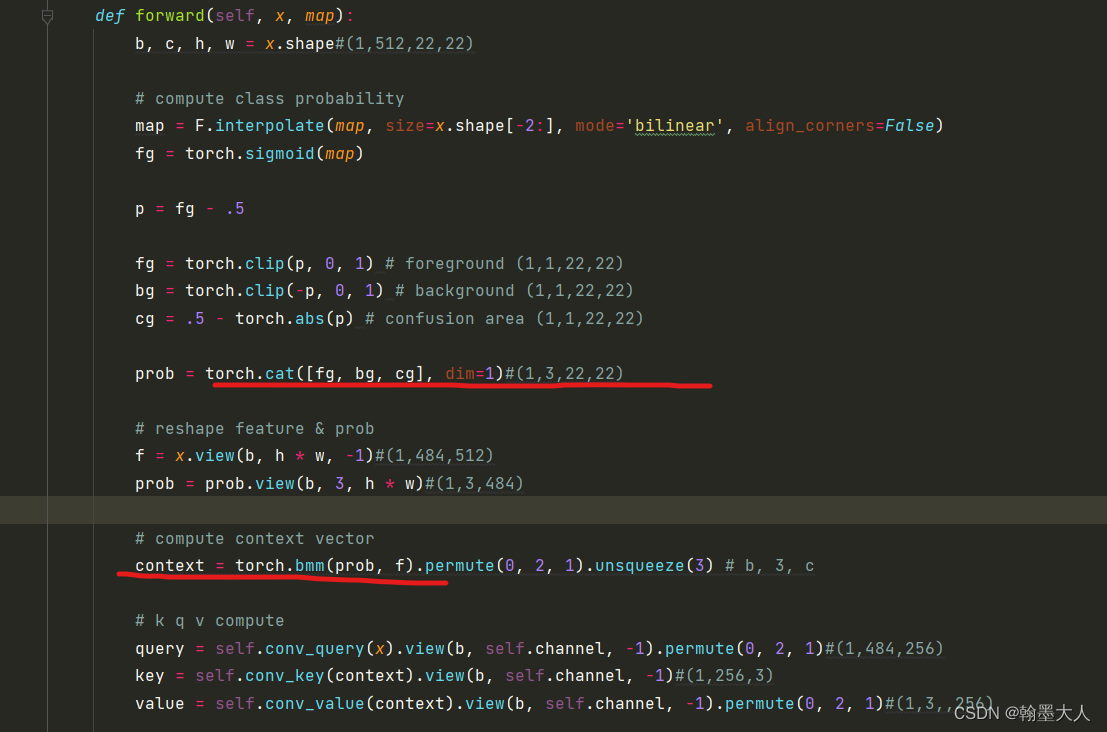
根据框架我们可以看到:encoder最后一层输出,输入到decoder中,大小并没有发生变化,且会产生一个初始的分割图,然后对分割图者不进行完善,最后上采样四倍。本文将分割图进行阈值处理,Mu作为不确定区域,然后将三个区域concat与原始的图进行注意力计算。

作者在3.3提到物体的边界区域有一个很低的saliency分数,反注意力是一个有效的方法去进行边界引导。我们专注于特征图和反特征图发现,边界区域的分数输一个模糊的分数为0.5,作者认为特征图和反特征图具有相等的边界信息,因为1减去特征图就是反特征图。即公式2,m=0.5,我们就把他判为不确定区域。这是不确定区域的来源。
那么他将起到什么作用呢?
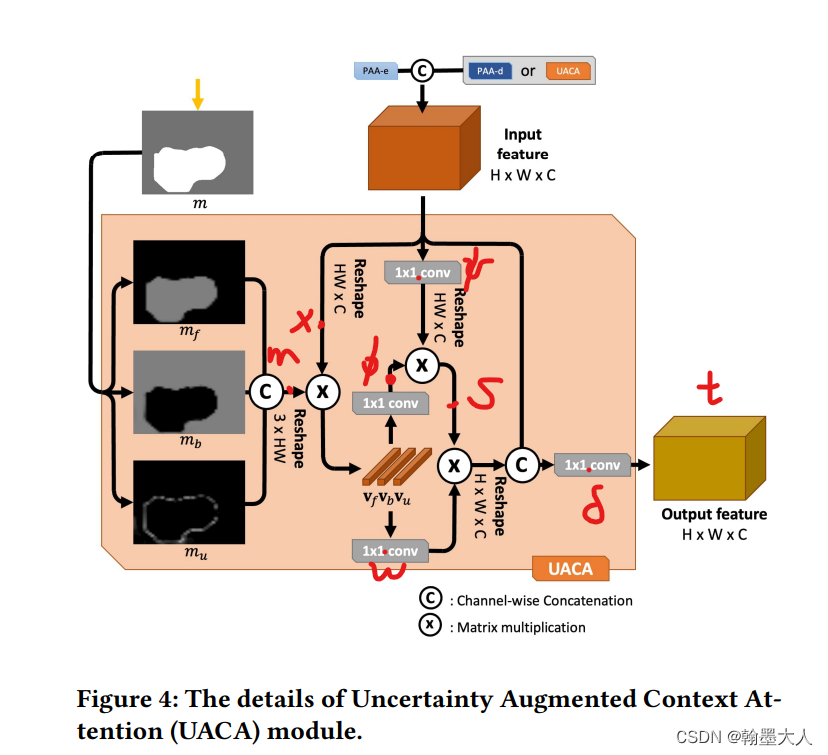
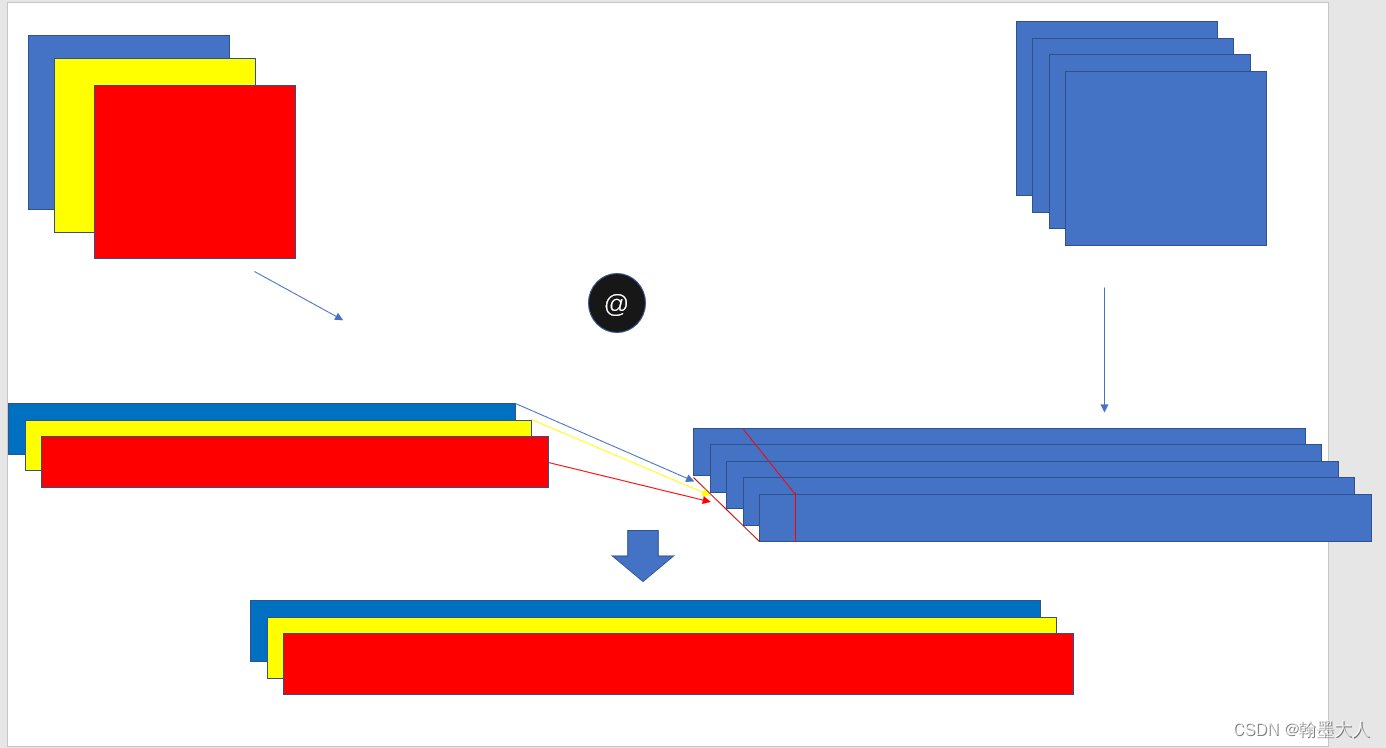
由图可以看到,我们将他concat起来,刚才求三个区域,为了就是把他分开,现在concat一起有作用吗?
其实是有的,因为concat之后我们和原始图片相乘,每一个区域还是取出来的。然后再对x做注意力。
第三篇:Rectifying Pseudo Label Learning via Uncertainty Estimation for Domain Semantic Segmentation
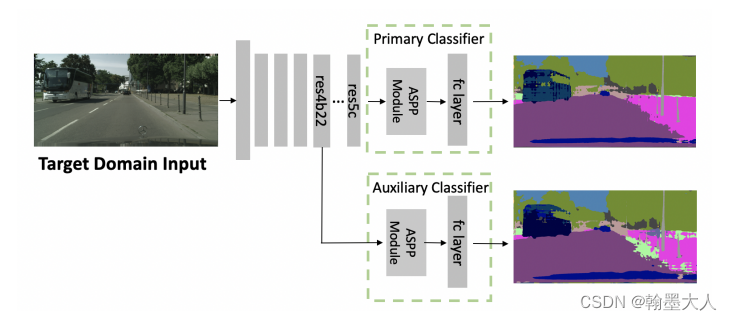
来源:作者通过预测方差量化不确定度。预测是两个分类器的输出预测
通过kl散度实现的:

去处:通过与交叉熵损失函数相乘,作为loss,给每一个像素分配一个权重。
在代码中实现:class ResNetMulti(nn.Module): def __init__(self, block, layers, num_classes, use_se = False, train_bn = False, norm_style = 'bn', droprate = 0.1): self.inplanes = 64 self.train_bn = train_bn super(ResNetMulti, self).__init__() self.conv1 = nn.Conv2d(3, 64, kernel_size=7, stride=2, padding=3, bias=False) self.bn1 = nn.BatchNorm2d(64, affine=affine_par) for i in self.bn1.parameters(): i.requires_grad = self.train_bn self.relu = nn.ReLU(inplace=True) self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=1, ceil_mode=True) # change self.layer1 = self._make_layer(block, 64, layers[0]) self.layer2 = self._make_layer(block, 128, layers[1], stride=2) self.layer3 = self._make_layer(block, 256, layers[2], stride=1, dilation=2) self.layer4 = self._make_layer(block, 512, layers[3], stride=1, dilation=4) self.layer5 = self._make_pred_layer(Classifier_Module, 1024, [6, 12, 18, 24], [6, 12, 18, 24], num_classes, norm_style, droprate, use_se) self.layer6 = self._make_pred_layer(Classifier_Module, 1024 + 2048, [6, 12, 18, 24], [6, 12, 18, 24], num_classes, norm_style, droprate, use_se) #for m in self.modules(): # if isinstance(m, nn.Conv2d): # n = m.kernel_size[0] * m.kernel_size[1] * m.out_channels # m.weight.data.normal_(0, 0.01) # elif isinstance(m, nn.BatchNorm2d): # m.weight.data.fill_(1) # m.bias.data.zero_() # for i in m.parameters(): # i.requires_grad = False def _make_layer(self, block, planes, blocks, stride=1, dilation=1): downsample = None if stride != 1 or self.inplanes != planes * block.expansion or dilation == 2 or dilation == 4: downsample = nn.Sequential( nn.Conv2d(self.inplanes, planes * block.expansion, kernel_size=1, stride=stride, bias=False), nn.BatchNorm2d(planes * block.expansion, affine=affine_par)) for i in downsample._modules['1'].parameters(): i.requires_grad = self.train_bn layers = [] layers.append(block(self.inplanes, planes, stride, dilation=dilation, downsample=downsample, train_bn = self.train_bn)) self.inplanes = planes * block.expansion for i in range(1, blocks): layers.append(block(self.inplanes, planes, dilation=dilation, downsample = None, train_bn = self.train_bn)) return nn.Sequential(*layers) def _make_pred_layer(self, block, inplanes, dilation_series, padding_series, num_classes, norm_style, droprate, use_se): return block(inplanes, dilation_series, padding_series, num_classes, norm_style, droprate, use_se) def forward(self, x): x = self.conv1(x) x = self.bn1(x) x = self.relu(x) x = self.maxpool(x) x = self.layer1(x) x = self.layer2(x) x = self.layer3(x) x1 = self.layer5(x) x2 = torch.cat((self.layer4(x),x), 1) x2 = self.layer6(x2) return x1, x2- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
首先输入经过网络会产生两个输出。对应于两个classifier。即trainer_ms.py的:self.G

将模型送入cuda中,然后上采样到原图大小:pred_target1, pred_target2 = self.G(images_t) pred_target1 = self.interp_target(pred_target1) pred_target2 = self.interp_target(pred_target2)- 1
- 2
- 3
接着:将他们相加进行softmax,然后将两个分类器的预测值分别和他们相加的softmax值进行kl计算。
loss_kl = 0.0 if self.lambda_kl_target_copy>0: n, c, h, w = pred_target1.shape with torch.no_grad(): #pred_target1_flip, pred_target2_flip = self.G(fliplr(images_t)) #pred_target1_flip = self.interp_target(pred_target1_flip) #pred_target2_flip = self.interp_target(pred_target2_flip) mean_pred = self.sm(0.5*pred_target1 + pred_target2) #+ self.sm(fliplr(0.5*pred_target1_flip + pred_target2_flip)) ) /2 loss_kl = ( self.kl_loss(self.log_sm(pred_target2) , mean_pred) + self.kl_loss(self.log_sm(pred_target1) , mean_pred))/(n*h*w) #loss_kl = (self.kl_loss(self.log_sm(pred_target2) , self.sm(pred_target1) ) ) / (n*h*w) + (self.kl_loss(self.log_sm(pred_target1) , self.sm(pred_target2)) ) / (n*h*w) print(loss_kl) loss += self.lambda_kl_target * loss_kl- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
最后进行损失反向计算。
-
相关阅读:
QT实现钟表
PyQt5 & PyQt6 Designer 的安装
全栈工程师必须要掌握的前端JavaScript技能
Oracle自动备份,比较全
Feign源码解析:初始化过程(三)
Docker部署gitlab_ce(避坑版---社区版)
设计模式-07-装饰器模式
大数据学习(1)-Hadoop
stm32开发模板 && 建议
Zalando Postgres Operator 快速上手
- 原文地址:https://blog.csdn.net/qq_43733107/article/details/127689915
