-
轻量级RPC分布式网络通信框架设计——服务配置中心zookeeper解析
01 zookeeper介绍
zookeeper是为分布式应用提供一致性协调服务的中间件
zeekeeper的文件系统
zookeeper提供了一个多层级的节点命名空间(节点称为znode)。与文件系统不同的是,这些znode节点都可以设置关联的数据,而文件系统中只有文件节点可以存放数据而目录不行。zookeeper为了保证高吞吐和低延迟,在内存中维护了这个树状的目录结构,这种特性使得zookeeper不能存放大量的数据,每个节点的存放数据上限为1M。
zookeeper的通知机制
客户端会对某个znode建立一个watcher事件,当这个znode发生变化时,这些客户端会收到zk的通知,然后客户端可以根据znode变化做出业务上的改变
zookeeper的作用
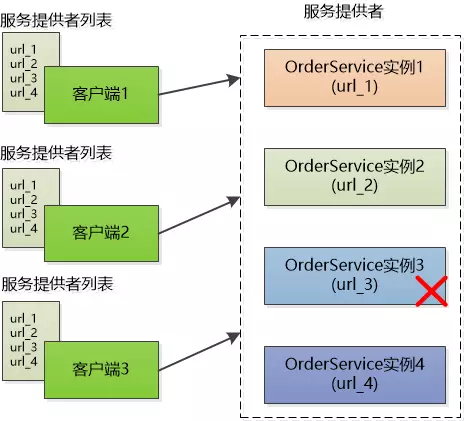
为了支持高并发,OrderService被部署了4份,每个客户端都保存了一份服务提供者的列表,但这个列表是静态的(在配置文件中写死的),如果服务的提供者发生了变化,例如有些机器down了,或者又新增了OrderService的实例,客户端根本不知道,想要得到最新的服务提供者的URL列表,必须手工更新配置文件,很不方便。
解决方案
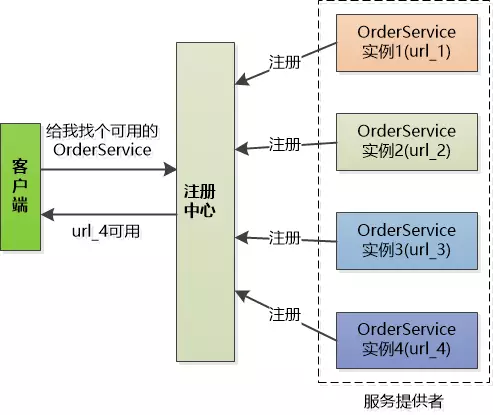
解除耦合,增加一个中间层 – 注册中心它保存了能提供的服务的名称,以及URL。首先这些服务会在注册中心进行注册,当客户端来查询的时候,只需要给出名称,注册中心就会给出一个URL。所有的客户端在访问服务前,都需要向这个注册中心进行询问,以获得最新的地址。
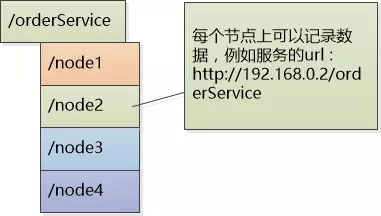
注册中心可以是树形结构,每个服务下面有若干节点,每个节点表示服务的实例。
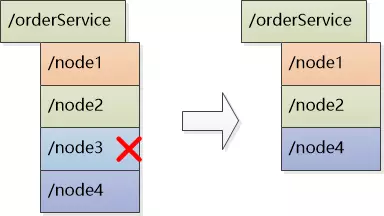
注册中心和各个服务实例直接建立Session,要求实例们定期发送心跳,一旦特定时间收不到心跳,则认为实例挂了,删除该实例。
总结
大概有如下功能:
- master节点选举, 主节点down掉后, 从节点就会接手工作, 并且保证这个节点是唯一的,这也就是所谓首脑模式,从而保证我们集群是高可用的
- 统一配置文件管理, 即只需要部署一台服务器, 则可以把相同的配置文件同步更新到其他所有服务器, 此操作在云计算中用的特别多(例如修改了redis统一配置)
- 数据发布与订阅, 类似消息队列MQ
- 分布式锁,分布式环境中不同进程之间争夺资源,类似于多进程中的锁
- 集群管理, 保证集群中数据的强一致性
02 服务配置中心用法
每个rpc服务器端都会向zookeeper服务注册配置中心 传入 ip + port + 服务名字 客户端进程查询获得ip+port
03 源码解析
注册服务
- 通过start函数连接zkserver
- 创建zk路径
// 把当前rpc节点上要发布的服务全部注册到zk上面,让rpc client可以从zk上发现服务 ZkClient zkCli; zkCli.Start(); // service_name为永久性节点 method_name为临时性节点 for (auto &sp : m_serviceMap) { // /service_name /UserServiceRpc std::string service_path = "/" + sp.first; zkCli.Create(service_path.c_str(), nullptr, 0); for (auto &mp : sp.second.m_methodMap) { // /service_name/method_name /UserServiceRpc/Login 存储当前这个rpc服务节点主机的ip和port std::string method_path = service_path + "/" + mp.first; char method_path_data[128] = {0}; sprintf(method_path_data, "%s:%d", ip.c_str(), port); // ZOO_EPHEMERAL表示znode是一个临时性节点 zkCli.Create(method_path.c_str(), method_path_data, strlen(method_path_data), ZOO_EPHEMERAL); } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
查询服务
- 通过start连接zkserver
- 通过getdata方法传入method_name 获得ip + port
// rpc调用方想调用service_name的method_name服务,需要查询zk上该服务所在的host信息 ZkClient zkCli; zkCli.Start(); // 连接服务器 // /UserServiceRpc/Login std::string method_path = "/" + service_name + "/" + method_name; // 127.0.0.1:8000 std::string host_data = zkCli.GetData(method_path.c_str());- 1
- 2
- 3
- 4
- 5
- 6
- 7
zk代码
一级路径 /service_name 设置为永久性节点
二级路径 /service_name/method_name 设置为临时性节点
zookeeper.util
#pragma once #include#include #include //封装的zk类 class ZkClient { public: ZkClient(); ~ZkClient(); void Start(); // 启动zkserver void Create(const char *path, const char *data, int datalen, int state = 0); // 在zkserver上根据指定的path创建znode节点 state = 0代表永久性节点 std::string GetData(const char *path); //根据参数指定的znode节点路径 获得znode节点的值 private: zhandle_t *m_zhandle; //zk的客户端句柄 操作zkserver }; - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
zookeeperutil.cc
#include "zookeeperutil.h" #include "mprpcapplication.h" #include#include // 全局的watcher观察器 zkserver给zkclient的通知 void global_watcher(zhandle_t *zh, int type, int state, const char *path, void *watcherCtx) { if (type == ZOO_SESSION_EVENT) // 回调的消息类型是和会话相关的消息类型 { if (state == ZOO_CONNECTED_STATE) // zkclient和zkserver连接成功 { sem_t *sem = (sem_t*)zoo_get_context(zh); // 获取信号量 sem_post(sem); // 信号量资源+1 } } } ZkClient::ZkClient() : m_zhandle(nullptr) { } ZkClient::~ZkClient() { if (m_zhandle != nullptr) { zookeeper_close(m_zhandle); // 关闭句柄,释放资源 MySQL_Conn } } // 连接zkserver void ZkClient::Start() { std::string host = MprpcApplication::GetInstance().GetConfig().Load("zookeeperip"); std::string port = MprpcApplication::GetInstance().GetConfig().Load("zookeeperport"); std::string connstr = host + ":" + port; /* zookeeper_mt:多线程版本 zookeeper的API客户端程序提供了三个线程 API调用线程 网络I/O线程 pthread_create poll watcher回调线程 pthread_create */ // 异步操作 知道watcher结束才成功 m_zhandle = zookeeper_init(connstr.c_str(), global_watcher, 30000, nullptr, nullptr, 0); //连接字符串 全局回调 会话超时时间30s if (nullptr == m_zhandle) { std::cout << "zookeeper_init error!" << std::endl; exit(EXIT_FAILURE); } // 句柄设置成功 只代表内存的开辟 不代表连接的成功 sem_t sem; sem_init(&sem, 0, 0); zoo_set_context(m_zhandle, &sem); sem_wait(&sem); // 初始信号量为0 在这阻塞 去global_watcher中获取资源 信号量加1 获取资源成功 进行下一步 std::cout << "zookeeper_init success!" << std::endl; // 异步的连接过程 } void ZkClient::Create(const char *path, const char *data, int datalen, int state) { char path_buffer[128]; int bufferlen = sizeof(path_buffer); int flag; // 先判断path表示的znode节点是否存在,如果存在,就不再重复创建了 flag = zoo_exists(m_zhandle, path, 0, nullptr); if (ZNONODE == flag) // 表示path的znode节点不存在 { // 创建指定path的znode节点了 flag = zoo_create(m_zhandle, path, data, datalen, &ZOO_OPEN_ACL_UNSAFE, state, path_buffer, bufferlen); if (flag == ZOK) // 异常判断 { std::cout << "znode create success... path:" << path << std::endl; } else { std::cout << "flag:" << flag << std::endl; std::cout << "znode create error... path:" << path << std::endl; exit(EXIT_FAILURE); } } } // 根据指定的path,获取znode节点的值 std::string ZkClient::GetData(const char *path) { char buffer[64]; int bufferlen = sizeof(buffer); int flag = zoo_get(m_zhandle, path, 0, buffer, &bufferlen, nullptr); if (flag != ZOK) // 操作失败 { std::cout << "get znode error... path:" << path << std::endl; return ""; } else { return buffer; } } - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
04 其他功能介绍
分布式锁
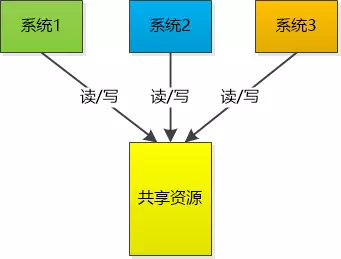
分布式锁, 多台机器上运行的不同的系统操作同一资源
- 使用Master选举的方式,让大家去抢,谁能抢到就创建一个
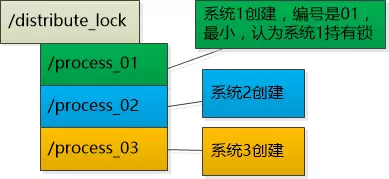
/distribute_lock节点,读完以后就删除,让大家再来抢。缺点是某个系统可能多次抢到,不够公平。 - 让每个系统在注册中心的
/distribute_lock下创建子节点,然后编号,每个系统检查自己的编号,谁的编号小认为谁持有了锁,比如下图中是系统1持有了锁
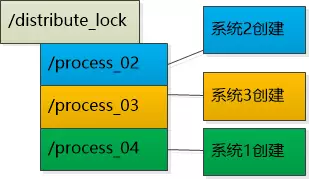
系统1操作完成以后,就可以把process_01删除了,再创建一个新的节点 process_04。此时是process_02最小了,所以认为系统2持有了锁。
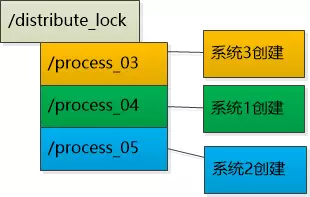
操作完成以后也要把process_02节点删除,创建新的节点。这时候process_03就是最小的了,可以持有锁了。
注册中心的高可用
08153)]
系统1操作完成以后,就可以把process_01删除了,再创建一个新的节点 process_04。此时是process_02最小了,所以认为系统2持有了锁。
[外链图片转存中…(img-hrJhiwfU-1667742208153)]
操作完成以后也要把process_02节点删除,创建新的节点。这时候process_03就是最小的了,可以持有锁了。
[外链图片转存中…(img-FANo7o5M-1667742208153)]
注册中心的高可用
- 如果注册中心只有一台机器,一旦挂了,整个系统就宕了。所以需要多台机器来保证高可用性。这样引出了新的问题,比如树形结构需要在多台机器之间进行同步,通信超时了怎么办,如何保证树形结构在机器之间的强一致性。
-
相关阅读:
MFC:字符串处理
【推荐收藏】这8个常用缺失值填充技巧一定要掌握
TIA博途中如何在网络视图中显示完整的设备名称?
Centos7下新硬盘的挂载操作
力扣(LeetCode)180. 连续出现的数字(2022.06.29)
ShardingSphere-JDBC实战
C++多线程的用法(包含线程池小项目)
MySQL必知必会_第七~十二章知识总结
VulnHub DC-6
Systemverilog中使用interface连接testbench和dut的端口
- 原文地址:https://blog.csdn.net/qq_41945053/article/details/127721890