-
opencv计算图像梯度:Sobel、Scharr、Laplacian详解
opencv计算图像梯度:Sobel、Scharr、Laplacian、Canny详解
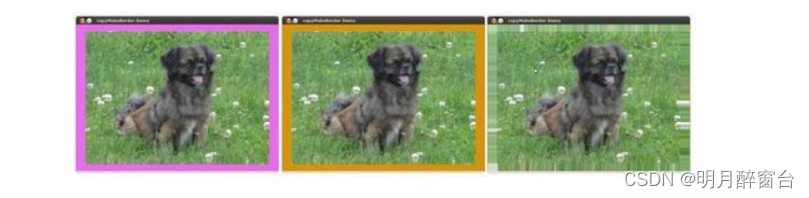
1.边界填充
函数:
void cv::copyMakeBorder (InputArray src, OutputArray dst, int top, int bottom, int left, int right, int borderType, //填充类型 const Scalar & value = Scalar() //填充颜色 ) Python: cv.copyMakeBorder( src, top, bottom, left, right, borderType[, dst[, value]] ) -> dst- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
填充类型:
- BORDER_CONSTANT:用固定值填充图像
- BORDER_REPLICATE:原始边界最边缘的行或列被复制到额外的边界。
使用如下:
RNG rng(12345); int top, bottom, left, right; int borderType = BORDER_CONSTANT; // Initialize arguments for the filter top = (int) (0.05*src.rows); bottom = top; left = (int) (0.05*src.cols); right = left; Scalar value( rng.uniform(0, 255), rng.uniform(0, 255), rng.uniform(0, 255) ); copyMakeBorder( src, dst, top, bottom, left, right, borderType, value );- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
2. Sobel算子
边缘检测原理如下图所示:
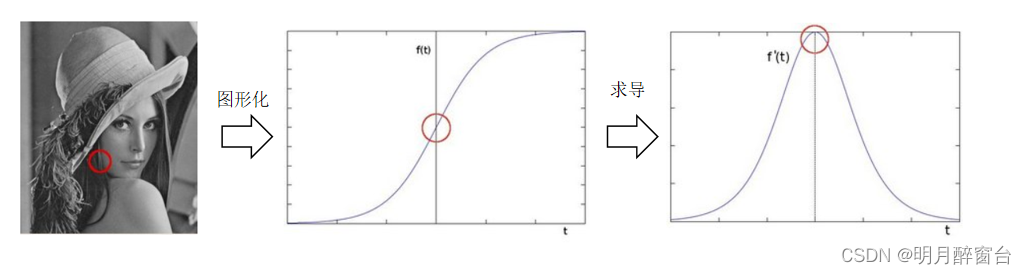
数学原理:
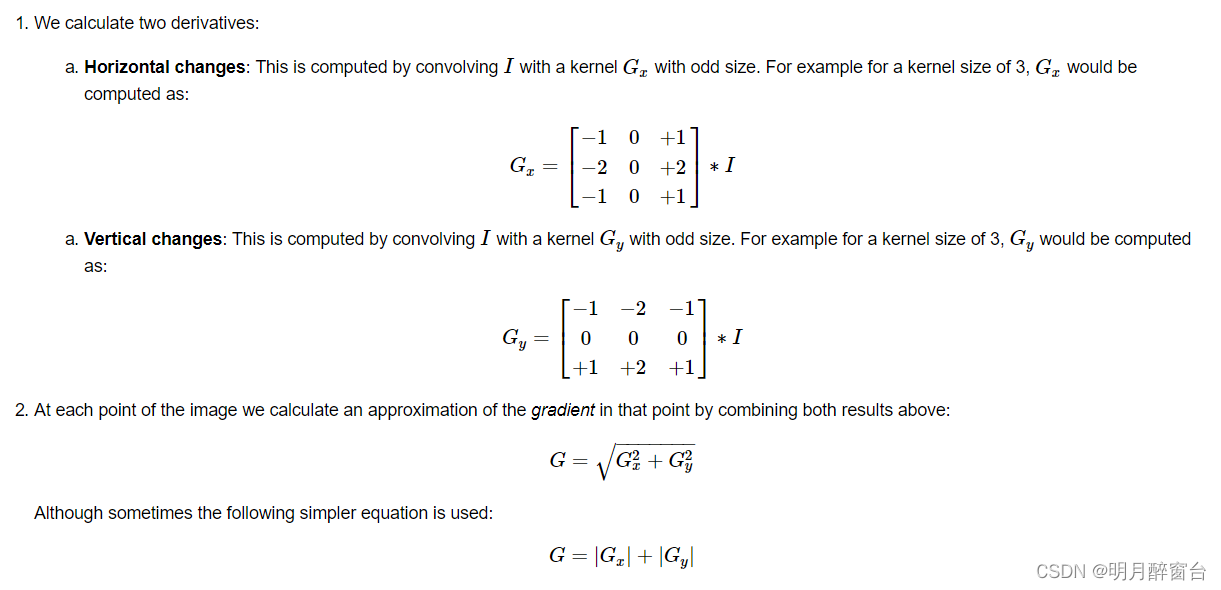
函数:void cv::Sobel (InputArray src, OutputArray dst, int ddepth, int dx, //x方向 int dy, //y方向 int ksize = 3, //核大小 double scale = 1, double delta = 0, int borderType = BORDER_DEFAULT ) Python: cv.Sobel( src, ddepth, dx, dy[, dst[, ksize[, scale[, delta[, borderType]]]]] ) -> dst- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
变换函数:
void cv::convertScaleAbs( InputArray src, OutputArray dst, double alpha = 1, //对比度 double beta = 0 //亮度 ) Python: cv.convertScaleAbs( src[, dst[, alpha[, beta]]] ) -> dst- 1
- 2
- 3
- 4
- 5
- 6
- 7
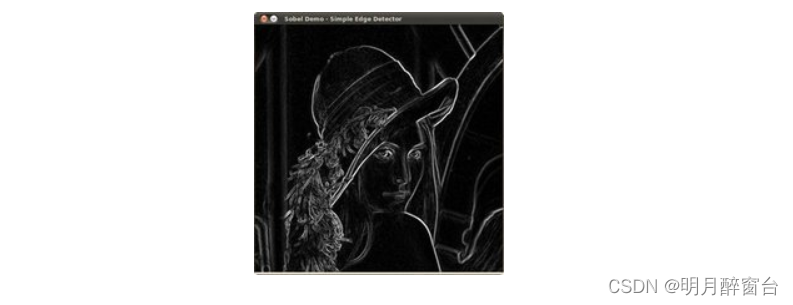
变换原理:

求梯度:cvtColor(src, src_gray, COLOR_BGR2GRAY); Mat grad_x, grad_y; Mat abs_grad_x, abs_grad_y; Sobel(src_gray, grad_x, ddepth, 1, 0, ksize, scale, delta, BORDER_DEFAULT); Sobel(src_gray, grad_y, ddepth, 0, 1, ksize, scale, delta, BORDER_DEFAULT); // converting back to CV_8U convertScaleAbs(grad_x, abs_grad_x); convertScaleAbs(grad_y, abs_grad_y); addWeighted(abs_grad_x, 0.5, abs_grad_y, 0.5, 0, grad);- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
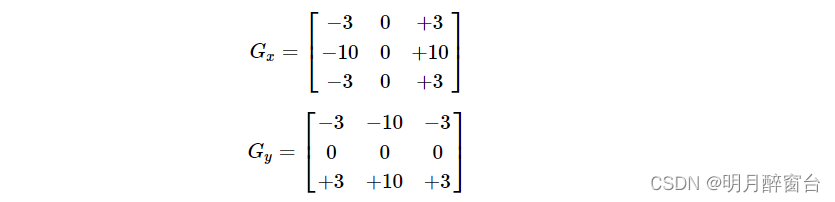
3. Scharr算子
函数接口:
void cv::Scharr (InputArray src, OutputArray dst, int ddepth, int dx, int dy, double scale = 1, double delta = 0, int borderType = BORDER_DEFAULT ) Python: cv.Scharr( src, ddepth, dx, dy[, dst[, scale[, delta[, borderType]]]] ) -> dst- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11

当核的大小为3时,上面所示的Sobel核可能产生明显的不准确性(毕竟,Sobel只是导数的近似值)。OpenCV通过使用Scharr()函数解决了大小为3的内核的不准确性问题。这与标准Sobel函数一样快,但更准确。它实现了以下内核:
求梯度时,与Sobel算子实现代码相同,下边给出边缘检测应用:Mat dx,dy; Scharr(blurImage,dx,CV_16S,1,0); Scharr(blurImage,dy,CV_16S,0,1); Canny( dx,dy, edge2, edgeThreshScharr, edgeThreshScharr*3 ); cedge = Scalar::all(0); image.copyTo(cedge, edge2);- 1
- 2
- 3
- 4
- 5
- 6
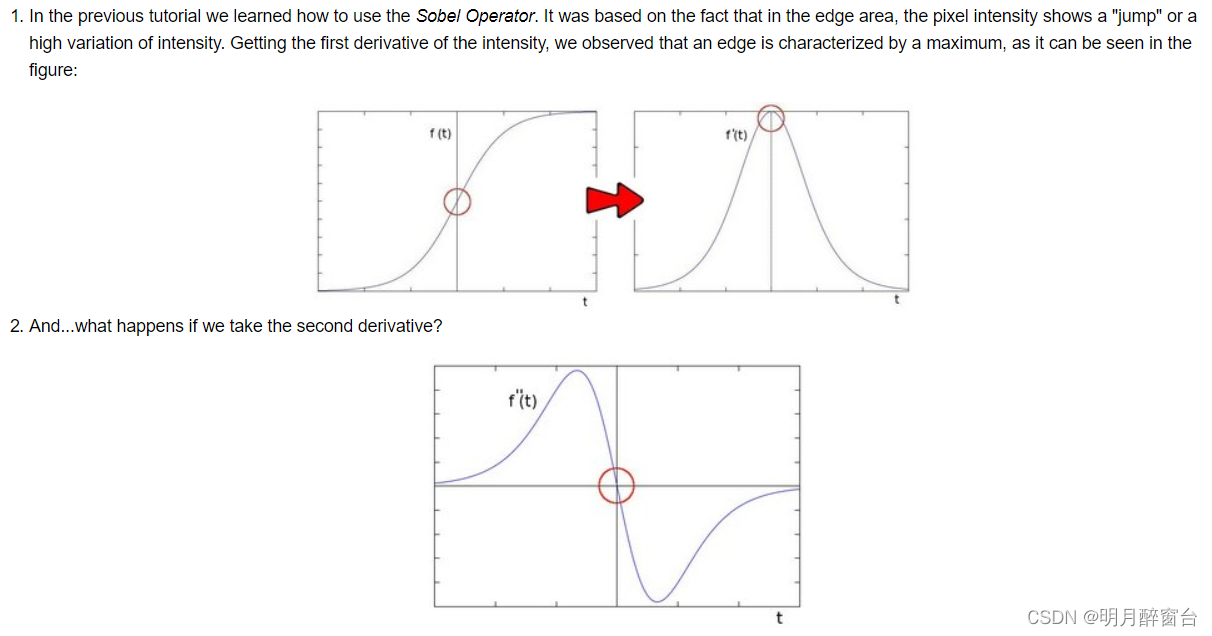
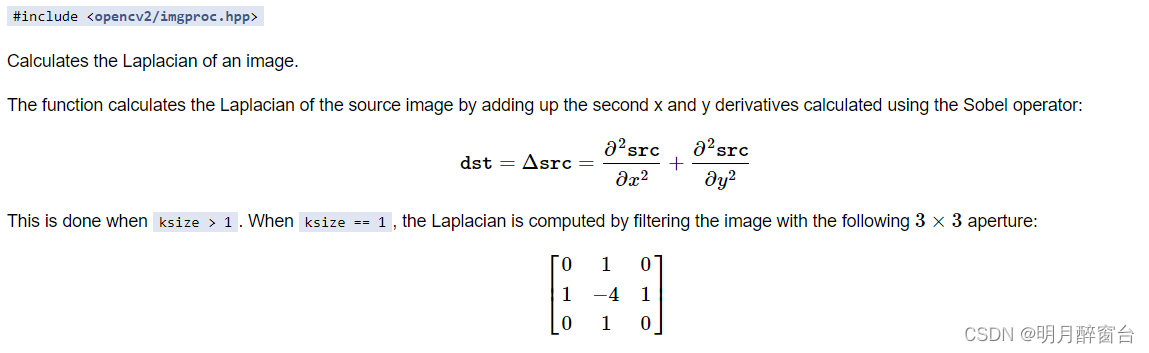
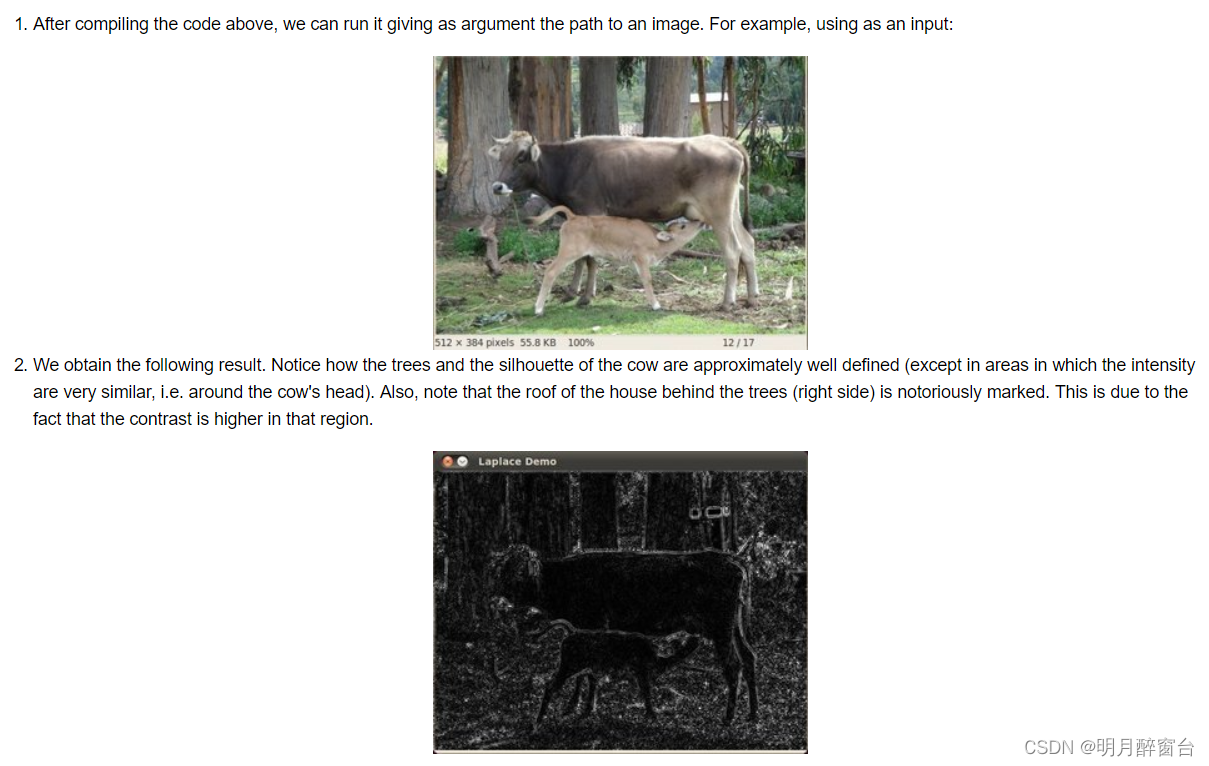
4. Laplacian算子
图形化数学原理:
void cv::Laplacian( InputArray src, OutputArray dst, int ddepth, int ksize = 1, double scale = 1, double delta = 0, int borderType = BORDER_DEFAULT ) Python: cv.Laplacian( src, ddepth[, dst[, ksize[, scale[, delta[, borderType]]]]] ) -> dst- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
求梯度实现:cvtColor( src, src_gray, COLOR_BGR2GRAY ); // Convert the image to grayscale Mat abs_dst; Laplacian( src_gray, dst, ddepth, kernel_size, scale, delta, BORDER_DEFAULT ); // converting back to CV_8U convertScaleAbs( dst, abs_dst );- 1
- 2
- 3
- 4
- 5
5.Canny
边缘检测算法步骤:
-
先经过高斯平滑,目的是去噪声
-
寻找图像强度梯度
-
非极大值抑制
上一步算出来的边缘可能比较粗糙,假设边缘是一条很细的线的话,上面处理完的结果你可以理解为得到一条比较粗的线条,所谓非极大值抑制,就是要在局部像素点中找到变换最剧烈的一个点,这样就得到了更细的边缘. -
双阈值检测和连接边缘
void Canny(cv::InputArray src, cv::OutputArray dst, double threshold1, //梯度小于minVal的像素点弃用,不视为边缘 double threshold2, //梯度大于maxVal的像素点保留,视为边缘 int aperture_size=3 );- 1
- 2
- 3
- 4
- 5
- 6
详细参考:
https://blog.csdn.net/Vermont_/article/details/108471205
https://blog.csdn.net/xddwz/article/details/111585648#include#include #include #include #include using namespace std; using namespace cv; int main() { Mat srcImage, grayImage; srcImage = imread("/Users/dwz/Desktop/cpp/1.jpg"); Mat srcImage1 = srcImage.clone(); cvtColor(srcImage, grayImage, COLOR_BGR2GRAY); Mat dstImage, edge; blur(grayImage, grayImage, Size(3,3)); Canny(grayImage, edge, 150, 100, 3); dstImage.create(srcImage1.size(), srcImage1.type()); dstImage = Scalar::all(0); srcImage1.copyTo(dstImage, edge); imwrite("canny.jpg", dstImage); return 0; } - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
6.总结
- 研究这个算子是想将其放在特征匹配前,通过对原始图像求出梯度,分析梯度图像的灰度信息特征来进行特征提取,发现加入梯度求解后算法耗时增加,二维卷积确实引进了不少耗时,竟然要高于同样尺寸大小的模板匹配
- 梯度算子对于提取图像中的关键特征具有重要作用,是作为轮廓提取的重要步骤
- 通常情况下,二维算子的效果要强于一维算子效果。
-
相关阅读:
阻塞和非阻塞,同步和异步
智能家居涉及到的12个物联网传感器!
Spring 中Bean的生命周期及后置处理器使用
多线程程序是如何执行代码的?
RK3399平台开发中安卓系统去除USB权限弹窗
《Node.js+Express+MongoDB+Vue.js全栈开发实战》简介
k8s 怎么精准获取deployment关联的pods?
2311rust,到38版本更新
Java中如何正确的将byte[]数组转化为String类型?
leetcode/两个链表的第一个重合节点
- 原文地址:https://blog.csdn.net/yohnyang/article/details/127688747
