-
orb-slam2 从单目开始的简单学习(7):Optimizer
前言
有不足或者不正确不清晰的地方可以随时在评论区或者私我,敬请斧正!
1. 整体介绍
class Optimizer { public: void static BundleAdjustment(const std::vector<KeyFrame*> &vpKF, const std::vector<MapPoint*> &vpMP, int nIterations = 5, bool *pbStopFlag=NULL, const unsigned long nLoopKF=0, const bool bRobust = true); void static GlobalBundleAdjustemnt(Map* pMap, int nIterations=5, bool *pbStopFlag=NULL, const unsigned long nLoopKF=0, const bool bRobust = true); void static LocalBundleAdjustment(KeyFrame* pKF, bool *pbStopFlag, Map *pMap); int static PoseOptimization(Frame* pFrame); // if bFixScale is true, 6DoF optimization (stereo,rgbd), 7DoF otherwise (mono) void static OptimizeEssentialGraph(Map* pMap, KeyFrame* pLoopKF, KeyFrame* pCurKF, const LoopClosing::KeyFrameAndPose &NonCorrectedSim3, const LoopClosing::KeyFrameAndPose &CorrectedSim3, const map<KeyFrame *, set<KeyFrame *> > &LoopConnections, const bool &bFixScale); // if bFixScale is true, optimize SE3 (stereo,rgbd), Sim3 otherwise (mono) static int OptimizeSim3(KeyFrame* pKF1, KeyFrame* pKF2, std::vector<MapPoint *> &vpMatches1, g2o::Sim3 &g2oS12, const float th2, const bool bFixScale); };1.1 数据类型
主要在
slam/ORB_SLAM2/Thirdparty/g2o/g2o/types
1.3 浅浅了解一下G2O
1.3.1 常见的数据结构
1.3.1.1 EdgeStereoSE3ProjectXYZOnlyPose
EdgeSE3ProjectXYZOnlyPose:一元边以仅优化相机姿势
详见slam/ORB_SLAM2/Thirdparty/g2o/g2o/types/types_six_dof_expmap.cpp以下来自slam/ORB_SLAM2/Thirdparty/g2o/g2o/types/types_six_dof_expmap.h
class EdgeSE3ProjectXYZOnlyPose: public BaseUnaryEdge<2, Vector2d, VertexSE3Expmap>{ public: EIGEN_MAKE_ALIGNED_OPERATOR_NEW EdgeSE3ProjectXYZOnlyPose(){} bool read(std::istream& is); bool write(std::ostream& os) const; void computeError() { const VertexSE3Expmap* v1 = static_cast<const VertexSE3Expmap*>(_vertices[0]); Vector2d obs(_measurement); _error = obs-cam_project(v1->estimate().map(Xw)); } bool isDepthPositive() { const VertexSE3Expmap* v1 = static_cast<const VertexSE3Expmap*>(_vertices[0]); return (v1->estimate().map(Xw))(2)>0.0; } virtual void linearizeOplus(); Vector2d cam_project(const Vector3d & trans_xyz) const; Vector3d Xw; double fx, fy, cx, cy; };1.3.1.2 VertexSBAPointXYZ
使用到的g2o顶点包括:
-
VertexSE3Expmap():SE(3)位姿
-
VertexSim3Expmap():Sim(3)位姿
-
VertexSBAPointXYZ():地图点坐标
使用到的g2o边包括:
-
EdgeSE3ProjectXYZ():BA中的重投影误差(3D-2D(u,v)误差),将地图点投影到相机坐标系下的相机平面。
-
EdgeSE3ProjectXYZOnlyPose():PoseEstimation中的重投影误差,将地图点投影到相机坐标系下的相机平面。优化变量只有pose,地图点位置固定,是一边元,双目中使用的是EdgeStereoSE3ProjectXYZOnlyPoze()。
-
EdgeSim3():Sim3之间的相对误差。优化变量只有Sim3表示的pose,用于OptimizeEssentialGraph。
-
EdgeSim3ProjectXYZ():重投影误差。优化变量Sim3位姿与地图点,用于闭环检测中的OptimizeSim3。
【参考文档】:ORB-SLAM(十二)优化
1.3.2 常见的边的函数
1.3.2.1 设置鲁棒核函数setRobustKernel
《slam14讲》p255
【参考文档】非线性优化库g2o使用教程,探索一些常见的用法,以及信息矩阵、鲁棒核函数对于优化的结果的影响

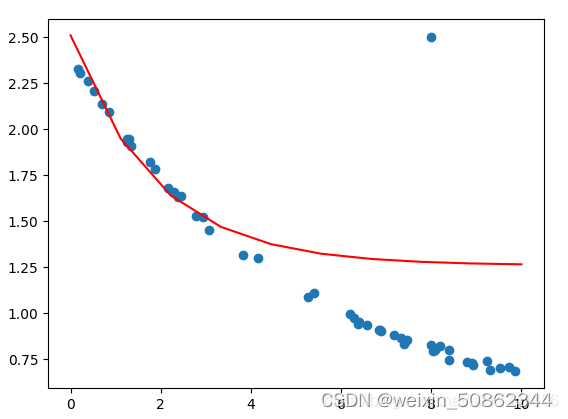
由于右上角那个离谱的点,导致优化时将整个函数被拉偏了。
那么怎么解决这种问题呢?g2o中提供了鲁棒核函数来抑制某些误差特别大的点,拉偏整个优化结果。
使用方法如下://构造一个Huber鲁棒核函数 g2o::RobustKernelHuber* robust_kernel_huber = new g2o::RobustKernelHuber; robust_kernel_huber->setDelta(0.3); //设置delta的大小。注意这个要根据实际的应用场景去尝试,然后选择合适的大小 e->setRobustKernel(robust_kernel_huber);//向边中添加鲁棒核函数g2o中提供了多种鲁棒核函数,你可以根据自己的需要进行选择。
加入鲁棒核函数之后,结果明显好转。1.3.2.2 其他鲁棒核函数
//todo!!
1.3.2.3 设置信息矩阵setInformation
【参考文档】非线性优化库g2o使用教程,探索一些常见的用法,以及信息矩阵、鲁棒核函数对于优化的结果的影响
在一次优化中,对于某一次测量,我们有十足的把握,它非常的准确,所以优化时我们希望对于这次测量给予更高的权重。
假设我们认为右上角那个异常点是一个比较正确的点(只是假设),我们希望拟合的曲线尽量往这个点偏移。那么我们就这可以设置这次测量边的权重更大。代码如下:
e->setInformation(Eigen::Matrix<double, 1, 1>::Identity() * 10);因为测量值的维度为1,所以信息矩阵也为1。如果我们把每一条边的信息矩阵都设置为一样,那么在优化时将认为所有边的优化权重是一样的,将不会对某一条边执行过多的优化!
对于那个异常点设置权重为别的点的10倍,则曲线会往右上角那个点靠。最终的结果如下图:
一般情况下,信息矩阵和鲁棒核函数都会一起使用!
1.3.2.4 设置优化边setLevel
一般g2o默认
只处理level为0的边,可以将,不进行优化的边的level设为11.3.3.4 设置边缘化 setMarginalized
利用H稀疏性加速计算的方法:schur消元,在SLAM研究中也被称为Marginalizeation(边缘化)
本质:求解位姿部分的增量方程,然后把解得的delta xc 代入到原方程,然后求解delta xp
【参考文档】《slam14讲》p2531.3.3.5 设置顶点setVertex
(1)单元边
e->setVertex(0, dynamic_cast<g2o::OptimizableGraph::Vertex*>(optimizer.vertex(0)));(2)双元边
如果是双元边,则0对应三维点顶点,1对应位姿顶点e->setVertex(0, dynamic_cast<g2o::OptimizableGraph::Vertex*>(optimizer.vertex(id))); e->setVertex(1, dynamic_cast<g2o::OptimizableGraph::Vertex*>(optimizer.vertex(pKFi->mnId)));1.3.3 常见的顶点的函数
1.3.3.1setEstimate
设置测量量
vSE3->setEstimate(Converter::toSE3Quat(pKFi->GetPose()));需要先将当前的坐标转换为四元数
orb-slam2中转换函数toSE3Quatg2o::SE3Quat Converter::toSE3Quat(const cv::Mat &cvT) { Eigen::Matrix<double,3,3> R; R << cvT.at<float>(0,0), cvT.at<float>(0,1), cvT.at<float>(0,2), cvT.at<float>(1,0), cvT.at<float>(1,1), cvT.at<float>(1,2), cvT.at<float>(2,0), cvT.at<float>(2,1), cvT.at<float>(2,2); Eigen::Matrix<double,3,1> t(cvT.at<float>(0,3), cvT.at<float>(1,3), cvT.at<float>(2,3)); return g2o::SE3Quat(R,t); } 至于SE3Quat有这两个重载方式: SE3Quat(const Matrix3d& R, const Vector3d& t) SE3Quat(const Quaterniond& q, const Vector3d& t) 从而最终转化为四元数1.3.3.2 设置顶点ID setId
使用示例:
vSE3->setId(pKFi->mnId);1.3.3.3 固定顶点setFixed
vSE3->setFixed(pKFi->mnId==0);//只固定第一帧2. PoseOptimization
只优化当前帧pose,地图点固定
2.1 PoseOptimization完整代码及注释
int Optimizer::PoseOptimization(Frame *pFrame)//只优化当前帧pose,地图点固定 { g2o::SparseOptimizer optimizer; g2o::BlockSolver_6_3::LinearSolverType * linearSolver; //pose维度为6(3个R,3个t),landmark维度为3 linearSolver = new g2o::LinearSolverDense<g2o::BlockSolver_6_3::PoseMatrixType>(); g2o::BlockSolver_6_3 * solver_ptr = new g2o::BlockSolver_6_3(linearSolver); g2o::OptimizationAlgorithmLevenberg* solver = new g2o::OptimizationAlgorithmLevenberg(solver_ptr); optimizer.setAlgorithm(solver); int nInitialCorrespondences=0;//当前帧对应到的地图点的数量 // 顶点:李代数位姿 Set Frame vertex g2o::VertexSE3Expmap * vSE3 = new g2o::VertexSE3Expmap(); vSE3->setEstimate(Converter::toSE3Quat(pFrame->mTcw)); vSE3->setId(0); vSE3->setFixed(false); optimizer.addVertex(vSE3); // Set MapPoint vertices const int N = pFrame->N; //单目 vector<g2o::EdgeSE3ProjectXYZOnlyPose*> vpEdgesMono; vector<size_t> vnIndexEdgeMono; vpEdgesMono.reserve(N);//传入边 vnIndexEdgeMono.reserve(N);//传入边对应的索引 //双目 vector<g2o::EdgeStereoSE3ProjectXYZOnlyPose*> vpEdgesStereo; vector<size_t> vnIndexEdgeStereo; vpEdgesStereo.reserve(N); vnIndexEdgeStereo.reserve(N); //定义自由度为2的卡方分布 const float deltaMono = sqrt(5.991); const float deltaStereo = sqrt(7.815); { unique_lock<mutex> lock(MapPoint::mGlobalMutex); for(int i=0; i<N; i++) { MapPoint* pMP = pFrame->mvpMapPoints[i];//对于传入的帧中的地图点 if(pMP)//物理判断 { // Monocular observation if(pFrame->mvuRight[i]<0)//单目相机没有右眼 { nInitialCorrespondences++; pFrame->mvbOutlier[i] = false; Eigen::Matrix<double,2,1> obs;//定义一个观测量 (u,v) const cv::KeyPoint &kpUn = pFrame->mvKeysUn[i]; obs << kpUn.pt.x, kpUn.pt.y;//将未矫正的点传入obs g2o::EdgeSE3ProjectXYZOnlyPose* e = new g2o::EdgeSE3ProjectXYZOnlyPose();//定义一条边 e->setVertex(0, dynamic_cast<g2o::OptimizableGraph::Vertex*>(optimizer.vertex(0))); e->setMeasurement(obs); const float invSigma2 = pFrame->mvInvLevelSigma2[kpUn.octave]; e->setInformation(Eigen::Matrix2d::Identity()*invSigma2);//信息矩阵 g2o::RobustKernelHuber* rk = new g2o::RobustKernelHuber; e->setRobustKernel(rk);//使用鲁棒核函数 rk->setDelta(deltaMono); //传入内参 e->fx = pFrame->fx; e->fy = pFrame->fy; e->cx = pFrame->cx;nInitialCorrespondences e->cy = pFrame->cy; cv::Mat Xw = pMP->GetWorldPos();//地图点的世界坐标 e->Xw[0] = Xw.at<float>(0); e->Xw[1] = Xw.at<float>(1); e->Xw[2] = Xw.at<float>(2); optimizer.addEdge(e); vpEdgesMono.push_back(e); vnIndexEdgeMono.push_back(i); } else //双目 Stereo observation { nInitialCorrespondences++; pFrame->mvbOutlier[i] = false; //SET EDGE Eigen::Matrix<double,3,1> obs; const cv::KeyPoint &kpUn = pFrame->mvKeysUn[i]; //每个关键点对应的立体坐标 const float &kp_ur = pFrame->mvuRight[i]; obs << kpUn.pt.x, kpUn.pt.y, kp_ur; g2o::EdgeStereoSE3ProjectXYZOnlyPose* e = new g2o::EdgeStereoSE3ProjectXYZOnlyPose(); e->setVertex(0, dynamic_cast<g2o::OptimizableGraph::Vertex*>(optimizer.vertex(0))); e->setMeasurement(obs); const float invSigma2 = pFrame->mvInvLevelSigma2[kpUn.octave]; Eigen::Matrix3d Info = Eigen::Matrix3d::Identity()*invSigma2; e->setInformation(Info); g2o::RobustKernelHuber* rk = new g2o::RobustKernelHuber; e->setRobustKernel(rk); rk->setDelta(deltaStereo); e->fx = pFrame->fx; e->fy = pFrame->fy; e->cx = pFrame->cx; e->cy = pFrame->cy; e->bf = pFrame->mbf; cv::Mat Xw = pMP->GetWorldPos(); e->Xw[0] = Xw.at<float>(0); e->Xw[1] = Xw.at<float>(1); e->Xw[2] = Xw.at<float>(2); optimizer.addEdge(e); vpEdgesStereo.push_back(e); vnIndexEdgeStereo.push_back(i); } } } } if(nInitialCorrespondences<3) return 0; delta // 我们执行了4次优化,每次优化后,我们将观察结果分类为内值/离群值 //We perform 4 optimizations, after each optimization we classify observation as inlier/outlier //在下一次优化中,不包括离群值,但最终可以将其再次分类为内值。 // At the next optimization, outliers are not included, but at the end they can be classified as inliers again. const float chi2Mono[4]={5.991,5.991,5.991,5.991};//单目卡方 const float chi2Stereo[4]={7.815,7.815,7.815, 7.815};//双目卡方 const int its[4]={10,10,10,10}; int nBad=0; for(size_t it=0; it<4; it++) { vSE3->setEstimate(Converter::toSE3Quat(pFrame->mTcw));//更新估计值 optimizer.initializeOptimization(0); optimizer.optimize(its[it]);//优化10次 nBad=0; //单目 for(size_t i=0, iend=vpEdgesMono.size(); i<iend; i++) { g2o::EdgeSE3ProjectXYZOnlyPose* e = vpEdgesMono[i];//经过外循环后获得优化后的边 const size_t idx = vnIndexEdgeMono[i];//获得优化后的边的索引 if(pFrame->mvbOutlier[idx]) { e->computeError(); } const float chi2 = e->chi2();//卡方统计量 if(chi2>chi2Mono[it]) { pFrame->mvbOutlier[idx]=true;//置为离群点 e->setLevel(1);//将离群点的level设为1,不进行优化 nBad++; } else { pFrame->mvbOutlier[idx]=false; e->setLevel(0);// 一般g2o默认只处理level为0的边 } if(it==2)//优化过一次之后离群点不再优化,不再需要鲁棒核 e->setRobustKernel(0); } //双目 for(size_t i=0, iend=vpEdgesStereo.size(); i<iend; i++) { g2o::EdgeStereoSE3ProjectXYZOnlyPose* e = vpEdgesStereo[i]; const size_t idx = vnIndexEdgeStereo[i]; if(pFrame->mvbOutlier[idx]) { e->computeError(); } const float chi2 = e->chi2(); if(chi2>chi2Stereo[it]) { pFrame->mvbOutlier[idx]=true; e->setLevel(1); nBad++; } else { e->setLevel(0); pFrame->mvbOutlier[idx]=false; } if(it==2) e->setRobustKernel(0); } if(optimizer.edges().size()<10) break; } // 恢复优化的姿态和返回内联点 Recover optimized pose and return number of inliers g2o::VertexSE3Expmap* vSE3_recov = static_cast<g2o::VertexSE3Expmap*>(optimizer.vertex(0));//优化后的顶点 g2o::SE3Quat SE3quat_recov = vSE3_recov->estimate(); cv::Mat pose = Converter::toCvMat(SE3quat_recov); pFrame->SetPose(pose); return nInitialCorrespondences-nBad; }3. BundleAdjustment
3.1 BundleAdjustment完整代码及注释
void Optimizer::BundleAdjustment(const vector<KeyFrame *> &vpKFs, const vector<MapPoint *> &vpMP, int nIterations, bool* pbStopFlag, const unsigned long nLoopKF, const bool bRobust) { vector<bool> vbNotIncludedMP; vbNotIncludedMP.resize(vpMP.size()); //-----------经典套路-------------------------- g2o::SparseOptimizer optimizer; g2o::BlockSolver_6_3::LinearSolverType * linearSolver; linearSolver = new g2o::LinearSolverEigen<g2o::BlockSolver_6_3::PoseMatrixType>(); g2o::BlockSolver_6_3 * solver_ptr = new g2o::BlockSolver_6_3(linearSolver); g2o::OptimizationAlgorithmLevenberg* solver = new g2o::OptimizationAlgorithmLevenberg(solver_ptr); optimizer.setAlgorithm(solver); //-----------经典套路-------------------------- //setForceStopFlag:设置在每次迭代时检查的变量,以强制用户停止。当变量为true时,迭代退出 if(pbStopFlag) optimizer.setForceStopFlag(pbStopFlag);//停止优化标志位 long unsigned int maxKFid = 0; // Set KeyFrame vertices for(size_t i=0; i<vpKFs.size(); i++) { KeyFrame* pKF = vpKFs[i]; if(pKF->isBad()) continue; //---------为每一个关键帧的位姿设置顶点---------------------- g2o::VertexSE3Expmap * vSE3 = new g2o::VertexSE3Expmap(); vSE3->setEstimate(Converter::toSE3Quat(pKF->GetPose()));//顶点设置为位姿 vSE3->setId(pKF->mnId); vSE3->setFixed(pKF->mnId==0); optimizer.addVertex(vSE3); //---------为每一个关键帧的位姿设置顶点---------------------- if(pKF->mnId>maxKFid) maxKFid=pKF->mnId; } //自由度为2(x,y)的卡方分布 const float thHuber2D = sqrt(5.99);//95% //自由度为3(x,y,deep)的卡方分布 const float thHuber3D = sqrt(7.815);//95% // Set MapPoint vertices for(size_t i=0; i<vpMP.size(); i++) { MapPoint* pMP = vpMP[i]; if(pMP->isBad()) continue; g2o::VertexSBAPointXYZ* vPoint = new g2o::VertexSBAPointXYZ();//landmark点 vPoint->setEstimate(Converter::toVector3d(pMP->GetWorldPos())); //mnId给了位姿顶点 const int id = pMP->mnId+maxKFid+1; vPoint->setId(id); vPoint->setMarginalized(true); optimizer.addVertex(vPoint); const map<KeyFrame*,size_t> observations = pMP->GetObservations(); int nEdges = 0; //SET EDGES for(map<KeyFrame*,size_t>::const_iterator mit=observations.begin(); mit!=observations.end(); mit++) { KeyFrame* pKF = mit->first; if(pKF->isBad() || pKF->mnId>maxKFid) continue; nEdges++; const cv::KeyPoint &kpUn = pKF->mvKeysUn[mit->second]; if(pKF->mvuRight[mit->second]<0)//单目 { Eigen::Matrix<double,2,1> obs; obs << kpUn.pt.x, kpUn.pt.y; //---------为每一个共视关系设置边---------------------- g2o::EdgeSE3ProjectXYZ* e = new g2o::EdgeSE3ProjectXYZ(); e->setVertex(0, dynamic_cast<g2o::OptimizableGraph::Vertex*>(optimizer.vertex(id))); e->setVertex(1, dynamic_cast<g2o::OptimizableGraph::Vertex*>(optimizer.vertex(pKF->mnId))); e->setMeasurement(obs); const float &invSigma2 = pKF->mvInvLevelSigma2[kpUn.octave]; e->setInformation(Eigen::Matrix2d::Identity()*invSigma2); //---------为每一个共视关系设置边---------------------- if(bRobust) { g2o::RobustKernelHuber* rk = new g2o::RobustKernelHuber; e->setRobustKernel(rk); rk->setDelta(thHuber2D); } e->fx = pKF->fx; e->fy = pKF->fy; e->cx = pKF->cx; e->cy = pKF->cy; optimizer.addEdge(e); } else//双目 { Eigen::Matrix<double,3,1> obs; const float kp_ur = pKF->mvuRight[mit->second]; obs << kpUn.pt.x, kpUn.pt.y, kp_ur; g2o::EdgeStereoSE3ProjectXYZ* e = new g2o::EdgeStereoSE3ProjectXYZ(); e->setVertex(0, dynamic_cast<g2o::OptimizableGraph::Vertex*>(optimizer.vertex(id))); e->setVertex(1, dynamic_cast<g2o::OptimizableGraph::Vertex*>(optimizer.vertex(pKF->mnId))); e->setMeasurement(obs); const float &invSigma2 = pKF->mvInvLevelSigma2[kpUn.octave]; Eigen::Matrix3d Info = Eigen::Matrix3d::Identity()*invSigma2; e->setInformation(Info); if(bRobust) { g2o::RobustKernelHuber* rk = new g2o::RobustKernelHuber; e->setRobustKernel(rk); rk->setDelta(thHuber3D); } e->fx = pKF->fx; e->fy = pKF->fy; e->cx = pKF->cx; e->cy = pKF->cy; e->bf = pKF->mbf; optimizer.addEdge(e); } } //如果图中的边数为0,则删除图中的结点 if(nEdges==0) { optimizer.removeVertex(vPoint); vbNotIncludedMP[i]=true; } else { vbNotIncludedMP[i]=false; } } // Optimize! optimizer.initializeOptimization(); optimizer.optimize(nIterations); // Recover optimized data //Keyframes for(size_t i=0; i<vpKFs.size(); i++) { KeyFrame* pKF = vpKFs[i]; if(pKF->isBad()) continue; g2o::VertexSE3Expmap* vSE3 = static_cast<g2o::VertexSE3Expmap*>(optimizer.vertex(pKF->mnId)); g2o::SE3Quat SE3quat = vSE3->estimate(); if(nLoopKF==0)//不发生回环,nLoopKF:回环帧数量 { //无回环就默认当前位姿 pKF->SetPose(Converter::toCvMat(SE3quat)); } else {//若出现回环要提取估计值进行回环检测在更新位姿 pKF->mTcwGBA.create(4,4,CV_32F); Converter::toCvMat(SE3quat).copyTo(pKF->mTcwGBA); pKF->mnBAGlobalForKF = nLoopKF; } } //Points for(size_t i=0; i<vpMP.size(); i++) { if(vbNotIncludedMP[i]) continue; MapPoint* pMP = vpMP[i]; if(pMP->isBad()) continue; g2o::VertexSBAPointXYZ* vPoint = static_cast<g2o::VertexSBAPointXYZ*>(optimizer.vertex(pMP->mnId+maxKFid+1)); if(nLoopKF==0)//获得优化后的世界坐标系坐标 { pMP->SetWorldPos(Converter::toCvMat(vPoint->estimate())); pMP->UpdateNormalAndDepth(); } else { pMP->mPosGBA.create(3,1,CV_32F); Converter::toCvMat(vPoint->estimate()).copyTo(pMP->mPosGBA); pMP->mnBAGlobalForKF = nLoopKF; } } }4.LocalBundleAdjustment
用于LocalMapping线程中剔除关键帧之前的局部地图优化
4.1 LocalBundleAdjustment中数据关系
LocalBundleAdjustment数据关系有点乱,因此特别说明一下
数据结构 来源 条件 vNeighKFs pKF->GetVectorCovisibleKeyFrames() lLocalKeyFrames vNeighKFs[i](当前帧的共视关键帧) 不是坏点 lLocalMapPoints 与正常的的共视关键帧匹配的地图点 (1)不是坏点(2)mnBALocalForKF未被当前帧固定(后面就被固定了) lFixedCameras 地图点的所有共视关系中的关键帧 mnBALocalForKF,mnBAFixedForKF均不属于当前帧(后面就属于了) 4.2 LocalBundleAdjustment完整代码及注释
void Optimizer::LocalBundleAdjustment(KeyFrame *pKF, bool* pbStopFlag, Map* pMap) { // Local KeyFrames: First Breath Search from Current Keyframe list<KeyFrame*> lLocalKeyFrames; lLocalKeyFrames.push_back(pKF); pKF->mnBALocalForKF = pKF->mnId;//对于每一个正常的KF或地图点都需要维护一个mnBALocalForKF //mnBALocalForKF:用于局部建图 const vector<KeyFrame*> vNeighKFs = pKF->GetVectorCovisibleKeyFrames();//获得当前帧的共视关键帧 //遍历当前帧的共视关键帧 lLocalKeyFrames存放不是坏点的pKFi for(int i=0, iend=vNeighKFs.size(); i<iend; i++) { KeyFrame* pKFi = vNeighKFs[i]; pKFi->mnBALocalForKF = pKF->mnId; if(!pKFi->isBad()) lLocalKeyFrames.push_back(pKFi); } // 在局部关键帧中看到的局部地图点 Local MapPoints seen in Local KeyFrames list<MapPoint*> lLocalMapPoints;//lLocalMapPoints存放不是坏点的地图点 //遍历当前帧正常的的共视关键帧寻找地图点 for(list<KeyFrame*>::iterator lit=lLocalKeyFrames.begin() , lend=lLocalKeyFrames.end(); lit!=lend; lit++) { vector<MapPoint*> vpMPs = (*lit)->GetMapPointMatches();//与正常的的共视关键帧匹配的地图点 for(vector<MapPoint*>::iterator vit=vpMPs.begin(), vend=vpMPs.end(); vit!=vend; vit++) { MapPoint* pMP = *vit; if(pMP) if(!pMP->isBad()) if(pMP->mnBALocalForKF!=pKF->mnId) { lLocalMapPoints.push_back(pMP); pMP->mnBALocalForKF=pKF->mnId; } } } //Fixed Keyframes. Keyframes that see Local MapPoints but that are not Local Keyframes // 固定关键帧。可以看到局部地图点但不是局部关键帧的关键帧 list<KeyFrame*> lFixedCameras; //存放了正常的地图点 for(list<MapPoint*>::iterator lit=lLocalMapPoints.begin(), lend=lLocalMapPoints.end(); lit!=lend; lit++) { map<KeyFrame*,size_t> observations = (*lit)->GetObservations();//对 当前地图点 找它的共视关系 //遍历当前地图点的所有共视关系 寻找不是当前帧的共视关键帧 for(map<KeyFrame*,size_t>::iterator mit=observations.begin(), mend=observations.end(); mit!=mend; mit++) { KeyFrame* pKFi = mit->first; //暂时不是当前帧的共视关键帧 :在遍历当前帧的共视关键帧时已经将pKFi->mnBALocalForKF = pKF->mnId; if(pKFi->mnBALocalForKF!=pKF->mnId && pKFi->mnBAFixedForKF!=pKF->mnId) { //该关键帧尚未被固定为当前关键帧的 pKFi->mnBAFixedForKF=pKF->mnId; if(!pKFi->isBad()) lFixedCameras.push_back(pKFi); } } } //-----------经典套路-------------------------- // Setup optimizer g2o::SparseOptimizer optimizer; g2o::BlockSolver_6_3::LinearSolverType * linearSolver; linearSolver = new g2o::LinearSolverEigen<g2o::BlockSolver_6_3::PoseMatrixType>(); g2o::BlockSolver_6_3 * solver_ptr = new g2o::BlockSolver_6_3(linearSolver); g2o::OptimizationAlgorithmLevenberg* solver = new g2o::OptimizationAlgorithmLevenberg(solver_ptr); optimizer.setAlgorithm(solver); //-----------经典套路-------------------------- if(pbStopFlag)//setForceStopFlag:设置在每次迭代时检查的变量,以强制用户停止。当变量为true时,迭代退出 optimizer.setForceStopFlag(pbStopFlag);//停止优化标志位 unsigned long maxKFid = 0; //------------为lLocalKeyFrames(当前关键帧的正常的共视关键帧)建立位姿顶点-------------------------------------------------- // Set Local KeyFrame vertices for(list<KeyFrame*>::iterator lit=lLocalKeyFrames.begin(), lend=lLocalKeyFrames.end(); lit!=lend; lit++) { KeyFrame* pKFi = *lit; g2o::VertexSE3Expmap * vSE3 = new g2o::VertexSE3Expmap(); vSE3->setEstimate(Converter::toSE3Quat(pKFi->GetPose())); vSE3->setId(pKFi->mnId); vSE3->setFixed(pKFi->mnId==0);//只固定第一帧 optimizer.addVertex(vSE3); if(pKFi->mnId>maxKFid) maxKFid=pKFi->mnId; } //------------为Fixed KeyFrame建立位姿顶点-------------------------------------------------- // Set Fixed KeyFrame vertices for(list<KeyFrame*>::iterator lit=lFixedCameras.begin(), lend=lFixedCameras.end(); lit!=lend; lit++) { KeyFrame* pKFi = *lit; g2o::VertexSE3Expmap * vSE3 = new g2o::VertexSE3Expmap(); vSE3->setEstimate(Converter::toSE3Quat(pKFi->GetPose())); vSE3->setId(pKFi->mnId); vSE3->setFixed(true); optimizer.addVertex(vSE3); if(pKFi->mnId>maxKFid) maxKFid=pKFi->mnId; } // Set MapPoint vertices const int nExpectedSize = (lLocalKeyFrames.size()+lFixedCameras.size())*lLocalMapPoints.size(); vector<g2o::EdgeSE3ProjectXYZ*> vpEdgesMono; vpEdgesMono.reserve(nExpectedSize); vector<KeyFrame*> vpEdgeKFMono; vpEdgeKFMono.reserve(nExpectedSize); vector<MapPoint*> vpMapPointEdgeMono; vpMapPointEdgeMono.reserve(nExpectedSize); vector<g2o::EdgeStereoSE3ProjectXYZ*> vpEdgesStereo; vpEdgesStereo.reserve(nExpectedSize); vector<KeyFrame*> vpEdgeKFStereo; vpEdgeKFStereo.reserve(nExpectedSize); vector<MapPoint*> vpMapPointEdgeStereo; vpMapPointEdgeStereo.reserve(nExpectedSize); //自由度为2(x,y)的卡方分布 const float thHuberMono = sqrt(5.991); //自由度为3(x,y,deep)的卡方分布 const float thHuberStereo = sqrt(7.815); for(list<MapPoint*>::iterator lit=lLocalMapPoints.begin(), lend=lLocalMapPoints.end(); lit!=lend; lit++) { //------------为MapPoint建立顶点------------------------------------ MapPoint* pMP = *lit; g2o::VertexSBAPointXYZ* vPoint = new g2o::VertexSBAPointXYZ(); vPoint->setEstimate(Converter::toVector3d(pMP->GetWorldPos())); int id = pMP->mnId+maxKFid+1; vPoint->setId(id); vPoint->setMarginalized(true); optimizer.addVertex(vPoint); const map<KeyFrame*,size_t> observations = pMP->GetObservations(); //Set edges for(map<KeyFrame*,size_t>::const_iterator mit=observations.begin(), mend=observations.end(); mit!=mend; mit++) { KeyFrame* pKFi = mit->first; if(!pKFi->isBad()) { const cv::KeyPoint &kpUn = pKFi->mvKeysUn[mit->second]; // 单目 Monocular observation if(pKFi->mvuRight[mit->second]<0) { Eigen::Matrix<double,2,1> obs; obs << kpUn.pt.x, kpUn.pt.y; g2o::EdgeSE3ProjectXYZ* e = new g2o::EdgeSE3ProjectXYZ(); //此时顶点应该代表MapPoint e->setVertex(0, dynamic_cast<g2o::OptimizableGraph::Vertex*>(optimizer.vertex(id))); //此时顶点应该代表KF e->setVertex(1, dynamic_cast<g2o::OptimizableGraph::Vertex*>(optimizer.vertex(pKFi->mnId))); e->setMeasurement(obs); const float &invSigma2 = pKFi->mvInvLevelSigma2[kpUn.octave]; e->setInformation(Eigen::Matrix2d::Identity()*invSigma2); g2o::RobustKernelHuber* rk = new g2o::RobustKernelHuber; e->setRobustKernel(rk); rk->setDelta(thHuberMono); e->fx = pKFi->fx; e->fy = pKFi->fy; e->cx = pKFi->cx; e->cy = pKFi->cy; optimizer.addEdge(e); vpEdgesMono.push_back(e); vpEdgeKFMono.push_back(pKFi); vpMapPointEdgeMono.push_back(pMP); } else // Stereo observation { Eigen::Matrix<double,3,1> obs; const float kp_ur = pKFi->mvuRight[mit->second]; obs << kpUn.pt.x, kpUn.pt.y, kp_ur; g2o::EdgeStereoSE3ProjectXYZ* e = new g2o::EdgeStereoSE3ProjectXYZ(); e->setVertex(0, dynamic_cast<g2o::OptimizableGraph::Vertex*>(optimizer.vertex(id))); e->setVertex(1, dynamic_cast<g2o::OptimizableGraph::Vertex*>(optimizer.vertex(pKFi->mnId))); e->setMeasurement(obs); const float &invSigma2 = pKFi->mvInvLevelSigma2[kpUn.octave]; Eigen::Matrix3d Info = Eigen::Matrix3d::Identity()*invSigma2; e->setInformation(Info); g2o::RobustKernelHuber* rk = new g2o::RobustKernelHuber; e->setRobustKernel(rk); rk->setDelta(thHuberStereo); e->fx = pKFi->fx; e->fy = pKFi->fy; e->cx = pKFi->cx; e->cy = pKFi->cy; e->bf = pKFi->mbf; optimizer.addEdge(e); vpEdgesStereo.push_back(e); vpEdgeKFStereo.push_back(pKFi); vpMapPointEdgeStereo.push_back(pMP); } } } } if(pbStopFlag) if(*pbStopFlag) return; optimizer.initializeOptimization(); optimizer.optimize(5);//优化5次 bool bDoMore= true; if(pbStopFlag) if(*pbStopFlag) bDoMore = false; if(bDoMore)//进一步进行优化 { // Check inlier observations for(size_t i=0, iend=vpEdgesMono.size(); i<iend;i++) { g2o::EdgeSE3ProjectXYZ* e = vpEdgesMono[i]; MapPoint* pMP = vpMapPointEdgeMono[i]; if(pMP->isBad()) continue; if(e->chi2()>5.991 || !e->isDepthPositive()) { e->setLevel(1);//不进行优化 } e->setRobustKernel(0); } for(size_t i=0, iend=vpEdgesStereo.size(); i<iend;i++) { g2o::EdgeStereoSE3ProjectXYZ* e = vpEdgesStereo[i]; MapPoint* pMP = vpMapPointEdgeStereo[i]; if(pMP->isBad()) continue; if(e->chi2()>7.815 || !e->isDepthPositive()) { e->setLevel(1); } e->setRobustKernel(0); } // Optimize again without the outliers optimizer.initializeOptimization(0); optimizer.optimize(10); }//if(bDoMore) vector<pair<KeyFrame*,MapPoint*> > vToErase; vToErase.reserve(vpEdgesMono.size()+vpEdgesStereo.size()); // Check inlier observations for(size_t i=0, iend=vpEdgesMono.size(); i<iend;i++) { g2o::EdgeSE3ProjectXYZ* e = vpEdgesMono[i]; MapPoint* pMP = vpMapPointEdgeMono[i]; if(pMP->isBad()) continue; if(e->chi2()>5.991 || !e->isDepthPositive()) { KeyFrame* pKFi = vpEdgeKFMono[i]; //不符合条件的先放入vToErase,之后再进一步消除 vToErase.push_back(make_pair(pKFi,pMP)); } } for(size_t i=0, iend=vpEdgesStereo.size(); i<iend;i++) { g2o::EdgeStereoSE3ProjectXYZ* e = vpEdgesStereo[i]; MapPoint* pMP = vpMapPointEdgeStereo[i]; if(pMP->isBad()) continue; if(e->chi2()>7.815 || !e->isDepthPositive()) { //为什么不先置为坏(尽管没有这个操作) KeyFrame* pKFi = vpEdgeKFStereo[i]; vToErase.push_back(make_pair(pKFi,pMP)); } } // 得到锁才能正式消除掉Get Map Mutex unique_lock<mutex> lock(pMap->mMutexMapUpdate); if(!vToErase.empty()) { for(size_t i=0;i<vToErase.size();i++) { KeyFrame* pKFi = vToErase[i].first; MapPoint* pMPi = vToErase[i].second; pKFi->EraseMapPointMatch(pMPi); pMPi->EraseObservation(pKFi); } } // 恢复优化后的Recover optimized data //Keyframes for(list<KeyFrame*>::iterator lit=lLocalKeyFrames.begin(), lend=lLocalKeyFrames.end(); lit!=lend; lit++) { KeyFrame* pKF = *lit; g2o::VertexSE3Expmap* vSE3 = static_cast<g2o::VertexSE3Expmap*>(optimizer.vertex(pKF->mnId)); g2o::SE3Quat SE3quat = vSE3->estimate(); pKF->SetPose(Converter::toCvMat(SE3quat)); } //Points for(list<MapPoint*>::iterator lit=lLocalMapPoints.begin(), lend=lLocalMapPoints.end(); lit!=lend; lit++) { MapPoint* pMP = *lit; g2o::VertexSBAPointXYZ* vPoint = static_cast<g2o::VertexSBAPointXYZ*>(optimizer.vertex(pMP->mnId+maxKFid+1)); pMP->SetWorldPos(Converter::toCvMat(vPoint->estimate())); pMP->UpdateNormalAndDepth(); } }5. GlobalBundleAdjustemnt
全局BA优化的代码是最简单的,调用了
BundleAdjustment()进行优化void Optimizer::GlobalBundleAdjustemnt(Map* pMap, int nIterations, bool* pbStopFlag, const unsigned long nLoopKF, const bool bRobust) { vector<KeyFrame*> vpKFs = pMap->GetAllKeyFrames(); vector<MapPoint*> vpMP = pMap->GetAllMapPoints(); BundleAdjustment(vpKFs,vpMP,nIterations,pbStopFlag, nLoopKF, bRobust); }【参考文档】https://www.cnblogs.com/shang-slam/p/6483725.html
-
-
相关阅读:
读书笔记:《浪潮之巅:下》
JAVA集合01_Collection接口概述、常用方法、集合和数组互转、3种遍历方式
pytorch_autograd v1.backward()+variable.grad
Open3D FPS最远点下采样
ACM第三周总结
深度学习之 11 卷积神经网络实现
文字弹性跳动CSS3代码
Android音视频开发:MediaRecorder录制音频
Docker安装redis
论文解读(AGC)《Attributed Graph Clustering via Adaptive Graph Convolution》
- 原文地址:https://blog.csdn.net/weixin_50862344/article/details/126912325