-
【目标跟踪-卡尔曼滤波】基于分布式Kalman滤波跟踪运动目标附Matlab代码
1 内容介绍
近年来,随着工业的发展,对于一些实际模型的建立所提出的要求也越来越高。作为对传统整数阶微积分学的一种扩展,分数阶微积分能实现对实际系统的更为准确的描述。目前,分数阶微积分在冶金、化工、电力、轻工和机械等工业过程中都有着广泛的应用,它的发展也为各个学科的发展提供了新的理论基础。


SISO分数阶系统的分数卡尔曼滤波器算法源代码,包括:分数扩展卡尔曼滤波器(FEKF)、分数中心卡尔曼滤波器(FCDKF)、分数无迹卡尔曼滤波器(FUKF)和分数粒子滤波器(FPF)
2 部分代码
%*************************************************************************%
% 无迹卡尔曼滤波器仿真复现 %
%_________________________________________________________________________%
% 论文 : 非线性系统滤波理论 P108 5.4.2 强非线性系统模型仿真
% 目的 : 无迹卡尔曼滤波器仿真复现
% 函数实验 ::
% | 3*sin(2*x_2) | | 1 |
% x_k = | x_1 + exp(-0.05x_3) + 10 | + | 1 |w_k
% | = x_1(x_2 + x_3)/5 + |x_1|/2 | | 1 |
%
% 结果 : 滤波效果良好
%
% 备注 :
%
%*************************************************************************%
clc
clear
%仿真步长
N = 50;
q = 0.3; %系统噪声均值
r = 0.5; %测量噪声均值
Q = 0.7; %系统噪声方差矩阵
R = 1.0; %测量噪声方差矩阵
% %GL定义下短记忆原理的长度
% L = N+1;
% %计算alpha阶次对应的GL定义系数 binomial coefficient
% bino_fir = zeros(1,N); %微分阶次为0.7时GL定义下的系数
% alpha = 0.7;
% bino_fir(1,1) = 1;
% for i = 2:1:N
% bino_fir(1,i) = (1-(alpha+1)/(i-1))*bino_fir(1,i-1);
% end
I = eye(3,3); %生成单位阵
%err_state_FEKF = zeros(kk_N,N);
X_state_real = zeros(3,N); %真实状态
Z_state_meas = zeros(1,N); %实际观测值
%噪声
W_noise = sqrt(Q)*randn(1,N) + q; %系统噪声
V_noise = sqrt(R)*randn(1,N) + r; %测量噪声
x_0 = [-0.7; 1; 1]; %初始状态
X_state_real(:,1) = x_0; %真实状态初始值
Z_state_meas(1,1) = V_noise(1,1); %测量数据初始值
f=@(x)[3*sin(2*x(2)); ...
x(1) + exp(-0.05*x(3)) + 10; ...
0.2 * x(1) * (x(2) + x(3)) + 0.5*abs(x(1)) ];
h=@(x)x(1) + x(2) * x(3);
for k=2:1:N
%计算实际状态
X_state_real(:,k) = f(X_state_real(:,k-1)) + [1; 1; 1] * W_noise(1,k-1);
%实际观测值
Z_state_meas(1,k) = h(X_state_real(:,k)) + V_noise(1,k);
end
%*************************************************************************%
%-------------------------无迹卡尔曼滤波器性能测试------------------------%
%*************************************************************************%
X_state_esti = zeros(3,N); %状态最优估计值
P_xesti = cell(1,N); %估计误差方差阵
%初始值设置(初始矩阵不能为零)
P_pred_0 = eye(3,3); %初始预测方差阵
P_xesti{1,1} = P_pred_0; %初始估计方差阵
state_dim = 3;
L_sample = 2 * state_dim +1;
SigmaPoints = zeros(3, L_sample);
SigmaWeight = zeros(1, L_sample);
GammaPoints = zeros(3, L_sample);
ChiPoints = zeros(1, L_sample);
%*******************************%
% 画图输出 均值方差估计散点图
%*******************************%
%输入与测量输出图
k = 1:1:N;
LineWidth = 1.5;
%square error
figure;
plot(k,X_state_real(3,:),'r',k,X_state_esti(3,:),'b--','linewidth',LineWidth);
%set(gcf,'Position',[200 200 400 300]);
%axis([xmin xmax ymin ymax])设置坐标轴在指定的区间
% axis normal
% axis([ -10 N 0 6 ])
ylabel('$x_3$','FontSize',8)
xlabel('time(sec)','FontSize',8)
%设置坐标轴刻度字体名称,大小
set(gca,'FontName','Helvetica','FontSize',8)
legend('real state','estimated state','Location','best');
legend('Real state 3','Estimation state 3','Location','best');
figure;
plot(k,X_state_real(2,:),'r',k,X_state_esti(2,:),'b--','linewidth',LineWidth);
%set(gcf,'Position',[200 200 400 300]);
%axis([xmin xmax ymin ymax])设置坐标轴在指定的区间
% axis normal
% axis([ -10 N 0 6 ])
ylabel('$x_3$','FontSize',8)
xlabel('time(sec)','FontSize',8)
%设置坐标轴刻度字体名称,大小
set(gca,'FontName','Helvetica','FontSize',8)
legend('real state','estimated state','Location','best');
legend('Real state 2','Estimation state 2','Location','best');
figure;
plot(k,X_state_real(1,:),'r',k,X_state_esti(1,:),'b--','linewidth',LineWidth);
%set(gcf,'Position',[200 200 400 300]);
%axis([xmin xmax ymin ymax])设置坐标轴在指定的区间
% axis normal
% axis([ -10 N 0 6 ])
ylabel('$x_3$','FontSize',8)
xlabel('time(sec)','FontSize',8)
%设置坐标轴刻度字体名称,大小
set(gca,'FontName','Helvetica','FontSize',8)
legend('real state','estimated state','Location','best');
legend('Real state 1','Estimation state 1','Location','best');
3 运行结果
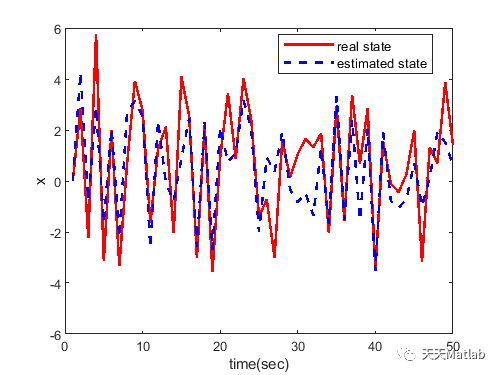

4 参考文献
[1]陈林. 一种基于卡尔曼滤波的运动目标跟踪方法[J]. 舰船电子对抗, 2011, 034(003):67-70.
[2]王雯洁, 汪非易, 赵航芳. 基于分布式传感器能量比的水下运动目标扩展卡尔曼滤波跟踪方法:, 2018.
博主简介:擅长智能优化算法、神经网络预测、信号处理、元胞自动机、图像处理、路径规划、无人机、雷达通信、无线传感器等多种领域的Matlab仿真,相关matlab代码问题可私信交流。
部分理论引用网络文献,若有侵权联系博主删除。
-
相关阅读:
OpenHarmony 3.1 Beta版本关键特性解析——分布式DeviceProfile
思科C9300交换机Bundle模式转换为Install模式
纳尼?华为首席架构师只用434页笔记,就将网络协议给拿下了
Lua CallbackHell优化
mybatis-plus使用sql的date_format()函数来查询数据
全链路追踪体验—最简陋TraceId的生成
弘辽科技:拼多多商家如何自己提升销量?提升销量需要注意什么?
springboot视图渲染技术
[WPF] 如何实现文字描边
深入探讨医保购药APP的技术架构与设计思路
- 原文地址:https://blog.csdn.net/qq_59747472/article/details/126698615