-
人工智能轨道交通行业周刊-第9期(2022.8.8-8.14)
0 前言
近期在阅读公众号的过程中,看到两篇眼前一亮的文章,在正文中均有链接。
第一篇是关于地铁车辆巡检机器人。在大铁领域,有TFDS(货车动态图像检测系统)、TEDS(动车组车辆故障图像检测系统)等系统,也有机房巡检机器人系统等,但尚无类似于上海地铁应用的车辆巡检机器人。个人认为,该机器人是适合走向标准化,替代人巡检的一个好的尝试,也会是未来一个容易快速应用的方向。
第二篇是关于接触网融冰装置的实验。在北方,接触网挂冰是一件令人头疼的事情,目前主要采用人工敲打的方式去冰,效率低下。而长沙轨道集团研制的该系统,或许可以改变既有的管理手段。
1 整理涉及公众号名单
1.1 行业类
- RT轨道交通
- 中关村轨道交通产业服务平台
- 人民铁道
- 世界轨道交通资讯网
- 铁路信号技术交流
- 北京铁路
- 轨道交通网
- 上榜
- 铁路视点
- ITS World
- 轨道交通联盟VSTR
- 铁路与城市轨道交通RailMetro
- 轨道世界
- 铁路那些事
1.2 人工智能类
- 江大白
- NVIDIA英伟达企业解决方案
- 机器学习算法工程师
- 糙科技
- 新智元
- AI科技评论
- 智东西
- CV技术指南
- 量子位
- 我爱计算机视觉
- 极视平台
- 人工智能学家
- AI前线
- 当交通遇上机器学习
2 轨道技术
(1)【聪明 灵活 憨态可掬】地铁智能机器人“接班”传统车辆巡检
导读:上海地铁试点的智能车辆巡检机器人瓦力,结合图像识别处理技术,能对车底关键检测点精确成像,智能判断车底关键部件状态。多自由度的机械臂以及机械臂前端的2D与3D图像采集单元,能实现多角度检测,并依靠机器视觉技术实现对目标缺陷的分析判定。能够替代对车下、车侧零部件检查几乎全覆盖,异物检测准确率达到98%

(2)国内城市轨道交通首次正线接触网直流融冰装置载流温升试验成功
导读:在北方的冬天,地铁或高铁接触网极易出现结冰现象,目前主要采用人工敲冰的方式进行去除,人力投入大,实时性差。长沙市轨道交通集团研制的地铁移动式接触网直流融冰装置,通过试验检验了地铁移动式接触网直流融冰装置的操作可行性,为探索和解决城市轨道交通架空接触网防冰冻及融冰问题提供了更多有价值的借鉴经验。

(3) 北醒:为轨道交通领域提供高性能三维激光雷达及解决方案
导读:北醒研制的轨道交通行业的长距3D激光雷达,满足轨道交通行业对高性能、高可靠性、严苛测试标准等多方面需求。可应用于多种部署场景,如列车车端及轨旁、站厅、站台、段场等。通过获取高清图像级3D点云,实现目标检测、识别及远距离追踪等功能。

3 AI技术
导读:本文从模型部署的角度,讲解了多种方式,面对不同的需求时如何选择部署方案,比如在嵌入式端如何部署?在服务器端如何部署?在移动端如何部署?如何进行模型压缩?

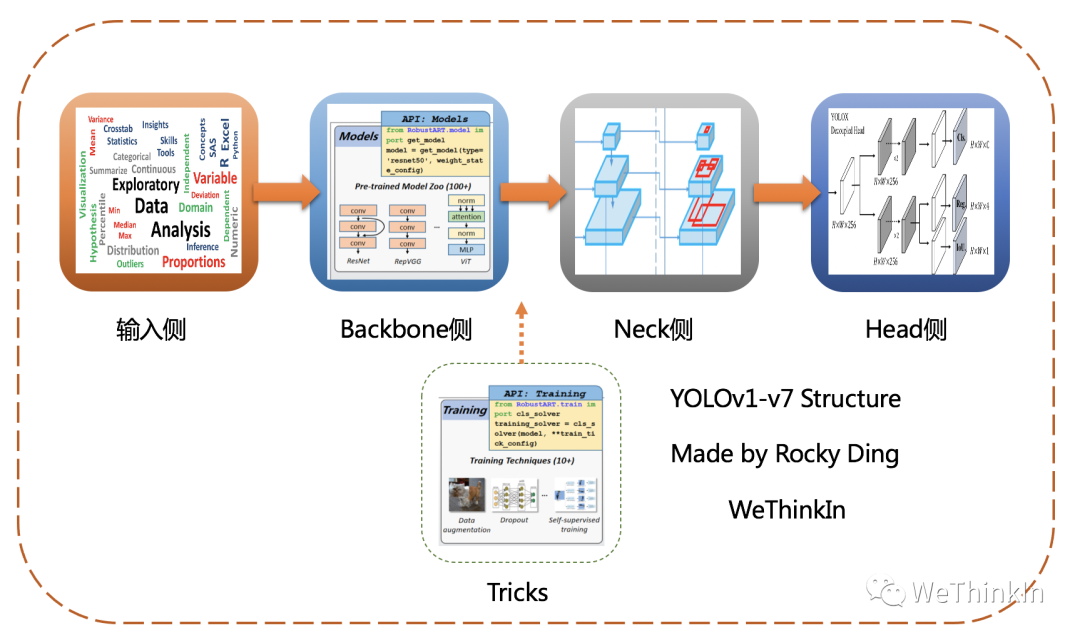
(2)深入浅出YOLOv1-v7目标检测算法,Neck层解析全面综述,值得学习!
导读:在目标检测领域,YOLO系列是部署应用最多的一种网络。Neck层是YOLO目标检测中,非常重要的部分,本文从YOLOv1到YOLOv7,对于每种Neck层进行了对比和讲解,希望对大家学习目标检测会有帮助!
导读: 什么是工程研究?什么是好的研究?AI 研究应该在哪里做?本文作者提供了一些角度,可以借鉴。
4 拓展阅读
导读:什么是低运量轨道交通?郑州、广州、西安、济南、合肥等地分别出台相关规划,京津冀、长三角、粤港澳大湾区等地区要科学发展城际铁路,构建城市群轨道交通网络。
导读:9号上午,北京地铁2号线朝阳门站(开往建国门方向)一乘客自行翻越站台门进入运营轨道正线。逝者已矣,大概是遇到了难以过去的坎。从轨道交通从业者的角度而言,能否优化屏蔽门系统,提高安全管理,才是这起事故给我们引发的思考。
导读:党的十八大以来,在科技创新的强力驱动下,中国高铁事业飞速发展,从引进、消化、吸收再创新到自主创新,高铁技术现在已经领跑世界,高铁成为我国自主创新的一个成功范例。回望中国高铁发展进程,中国标准动车组的研制成功,是一座重要里程碑。目前,纳入国家“十四五”规划纲要重点工程之一的CR450科技创新工程全面展开。

-
相关阅读:
2022杭电多校第三场 K题 Taxi
Net 高级调试之五:如何在托管函数上设置断点
C# 全局热键和键盘钩子都用于监听和响应按键事件,但它们有不同的用途和实现方式
如何压缩图片大小?图片压缩到200k以下跟我学
python+pytest接口自动化之token关联登录
探索Go语言在机器学习领域的应用局限与前景
计算机毕业设计(附源码)python幼儿英语学习平台的
GPT系列论文解读:GPT-2
亚马逊一分钟1000+的僵尸链接获取只需三步
fault-localization-data下载配置
- 原文地址:https://blog.csdn.net/zong596568821xp/article/details/126321142
