-
【zeno】为zeno增加子模块/新节点的最小化的例子
说明
本文旨在建立一个zeno的最小化的自定义节点(子模块)。
最终,你将看见自己新建的子节点
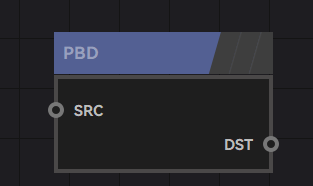
这里我建立的子模块名字为PBD1. git设置
自己fork一下zeno,然后把源换成自己的远程仓库,然后自己新建一个branch
这是为了保证自己随意写BUG(bushi),不影响其他部分。2. 在projects的目录下面新建文件夹并添加3个文件

其下有这PBD.h PBD.cpp, CMakeLists.txt, .gitignore四个文件
(gitignore只是用来告诉git哪些不需要纳入版本管理的,就不讲了)3. 在projects/PBD/CMakeLists.txt中写

增加这一行target_sources(zeno PRIVATE PBD.cpp PBD.h)- 1
没错就这一行
4. 在projects/CMakeLists.txt中增加


没错就增加这一行5. 在PBD.h和PBD.cpp中写自己的类
我们最终要的是编译出一个新的节点
一个模板
PBD.h
#pragma once #if defined (_MSC_VER) #undef max #undef min #define NOMINMAX #endif // disable some warnings on Windows #if defined (_MSC_VER) __pragma(warning (push)) __pragma(warning (disable : 4244)) __pragma(warning (disable : 4457)) __pragma(warning (disable : 4458)) __pragma(warning (disable : 4389)) __pragma(warning (disable : 4996)) #elif defined (__GNUC__) _Pragma("GCC diagnostic push") _Pragma("GCC diagnostic ignored \"-Wconversion\"") _Pragma("GCC diagnostic ignored \"-Wsign-compare\"") _Pragma("GCC diagnostic ignored \"-Wshadow\"") #endif //============================================================= class PBD { public: PBD(); }; #if defined (_MSC_VER) __pragma(warning (pop)) #elif defined (__GNUC__) _Pragma("GCC diagnostic pop") #endif- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
PBD.cpp
#include- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
解释一下:
zeno.h这个头文件包含了大部分所需要的工具类然后在zeno这个命名空间里写两部分:
- 类PBD的方法定义
- 类PBD在GUI中对应的节点
类PBD:
zeno写类用的是struct而不是class(其实也没啥大区别,不知道为什么他们这么用)
然后继承INode类(前面的zeno::也是命名空间)
然后重写一个虚函数apply对应节点
采用ZENDEFNODE这个宏。来将后台代码绑定到GUI上6. 开启CMake编译宏
更改build/CMakeCache.txt
或者利用VS Code的CMake插件编译


编译运行和最终效果
编译运行
选择如下配置,然后点击运行(那个三角形)

结果
按tab建立节点发现节点

建立子节点如下
-
相关阅读:
【因果推断python】41_异质干预效应1
webpack学习
淘宝扭蛋机小程序:现在是否是最佳开发时机?
动作捕捉系统用于苹果采摘机器人
Python 中的类与继承
使用 Python 和 OpenCV 制作反应游戏
Google Earth Engine APP(GEE)—查看亚马逊平原的1984——至今的每一景影像
已知起始点坐标、目的地方位角,计算沿着测地线飞行一定距离到达的目的地坐标
基于人脸识别的情绪社区(Python+Django+Mysql+Keras,tensorflow)
毕业设计-基于Unity的餐厅经营游戏的设计与开发(附源码、开题报告、论文、答辩PPT、演示视频,带数据库)
- 原文地址:https://blog.csdn.net/weixin_43940314/article/details/126165936
