-
Linux驱动开发(八)---树莓派SR04驱动开发
前文回顾
《Linux驱动开发(一)—环境搭建与hello world》
《Linux驱动开发(二)—驱动与设备的分离设计》
《Linux驱动开发(三)—设备树》
《Linux驱动开发(四)—树莓派内核编译》
《Linux驱动开发(五)—树莓派设备树配合驱动开发》
《Linux驱动开发(六)—树莓派配合硬件进行字符驱动开发》
《Linux驱动开发(七)—树莓派按键驱动开发》继续宣传一下韦老师的视频
70天30节Linux驱动开发快速入门系列课程【实战教学、技术讨论、直播答疑】

后面的内容,就开始以实际设备进行驱动学习,学习为各种传感器,总线设备等进行驱动编写,熟悉驱动开发过程。SR04
卡姿兰大眼睛

这是一款超声波测距传感器,共有四个引脚,VCC和GND就不说了,Trip是触发信号,Echo是回响信号

1、Trig引脚接收至少10us的高电平信号,用于触发超声波模块工作;
2、模块会自动发送8个40KHz的方波信号,自动检测是否有信号返回;
3、有信号返回,通过Echo引脚连接单片机的I/O口输出一高电平,高电平持续时间T就是超声波从发射到返回的时间;
4、声音在空气中的传播速度为340米/秒,即可计算出所测的距离:D = 340*T/2。原理是很简单的。

驱动原理
这里就需要用到两个GPIO,一个负责Trip,发出触发信号,一个负责Echo,接收Echo高电平信号,并计算高电平时间。
这里的Trip简单,持续一个大于10us的高电平即可,Echo引脚,我们需要监听上下边沿,然后计算出中间的时间,这里就需要用到中断。通过中断得到两个时间点,然后计算差值,传给用户。
其实前面两个大眼睛,其实一个是嘴巴,一个是耳朵。一个喊一个听。

设备树
设备树的编写如下

这里定义了两个引脚,17和是18,用来分别接Trip和Echo。
读取方法就是通过gpiod_get_index,可以读取多个引脚的描述信息(handle)。struct gpio_desc *trip, *echo; trip= gpiod_get_index(dev, "sr04", 0, GPIOD_OUT_HIGH); echo= gpiod_get_index(dev, "sr04", 1, GPIOD_OUT_HIGH);- 1
- 2
- 3
也可以分开定义不同的名字,看个人喜好罢了。

驱动编写第一步—测试硬件及中断
模块加载卸载部分就不说了,没什么好注意的,从probe函数开始说起吧。
首先定一个结构,用来存储gpio的信息,描述信息,终端信息。struct sr04_gpios{ struct gpio_desc *trip; struct gpio_desc *echo; int echo_irq; } ; struct sr04_gpios my_sr04_gpios;- 1
- 2
- 3
- 4
- 5
- 6
- 7
然后probe函数中。获取引脚描述和中断,并且注册中断,采用上下边沿触发
static int mysr04_probe(struct platform_device *pdev) { printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__); //读取关键引脚描述信息 my_sr04_gpios.trip= gpiod_get_index(&pdev->dev, "sr04", 0, GPIOD_OUT_HIGH); my_sr04_gpios.echo= gpiod_get_index(&pdev->dev, "sr04", 1, GPIOD_OUT_HIGH); //配置方向 gpiod_direction_output(my_sr04_gpios.trip,0); gpiod_direction_input(my_sr04_gpios.echo); //获取中断 my_sr04_gpios.echo_irq = gpiod_to_irq(my_sr04_gpios.echo); //注册中断 request_irq(my_sr04_gpios.echo_irq, my_sr04_echo_isr, IRQF_TRIGGER_RISING | IRQF_TRIGGER_FALLING, "mysr04_irq", NULL);//IRQF_TRIGGER_RISING | IRQF_TRIGGER_FALLING /* 注册file_operations */ major = register_chrdev(0, "pgg_sr04", &gpio_button_drv); mysr04_class = class_create(THIS_MODULE, "mysr04_class"); if (IS_ERR(mysr04_class)) { printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__); unregister_chrdev(major, "pgg_sr04"); return PTR_ERR(mysr04_class); } device_create(mysr04_class, NULL, MKDEV(major, 0), NULL, "pgg_sr04"); /* /dev/pgg_sr04 */ return 0; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37

同理,remove函数中反向操作
static int mysr04_remove(struct platform_device *pdev) { printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__); device_destroy(mysr04_class, MKDEV(major, 0)); class_destroy(mysr04_class); unregister_chrdev(major, "pgg_sr04"); gpiod_put(my_sr04_gpios.trip); gpiod_put(my_sr04_gpios.echo); free_irq(my_sr04_gpios.echo_irq,NULL); return 0; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
中断函数中,我们先调试一下,看看是否能收到上下边沿的终端信息。所以简单的添加一个打印
static irqreturn_t my_sr04_echo_isr(int irq, void *dev_id) { printk("revice irq %d\n", irq); return IRQ_HANDLED; }- 1
- 2
- 3
- 4
- 5
然后,我们在read函数中,将trip引脚拉高100us。随后等待看看能否收到两次中断。
static ssize_t gpio_button_drv_read (struct file *file, char __user *buf, size_t size, loff_t *offset) { printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__); gpiod_set_value(my_sr04_gpios.trip,1); udelay(100); gpiod_set_value(my_sr04_gpios.trip,0); return 0; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
用户侧程序
int main(int argc, char **argv) { int fd; char buf[1024]; int len; int ret; /* 1. 判断参数 */ if (argc < 2) { printf("Usage: %s -w\n" , argv[0]); printf(" %s -r\n", argv[0]); return -1; } /* 2. 打开文件 */ fd = open("/dev/pgg_sr04", O_RDWR); if (fd == -1) { printf("can not open file /dev/pgg_sr04\n"); return -1; } printf("open file /dev/pgg_sr04 ok\n"); /* 3. 写文件或读文件 */ if ((0 == strcmp(argv[1], "-w")) && (argc == 3)) { len = strlen(argv[2]) + 1; len = len < 1024 ? len : 1024; ret = write(fd, argv[2], len); printf("write driver: %d\n", ret); } else { len = read(fd, buf, 1024); printf("read driver: %d\n", len); buf[1023] = '\0'; printf("APP read : %s\n", buf); } close(fd); return 0; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
开始试验,更新DTD,上传ko,用户程序编译
pgg@raspberrypi:~/work/dirver $ sudo insmod mysr04.ko pgg@raspberrypi:~/work/dirver $ gcc -o mysr04_user mysr04_user.c pgg@raspberrypi:~/work/dirver $ sudo ./mysr04_user -r open file /dev/pgg_sr04 ok read driver: 0 APP read : pgg@raspberrypi:~/work/dirver $ dmesg [ 477.269477] drivers/char/mysr04.c gpio_button_drv_read line 49 [ 477.271846] revice irq 200 [ 477.271888] revice irq 200 pgg@raspberrypi:~/work/dirver $ dmesg -d -T [三 7月 27 09:15:17 2022 < 0.000000>] drivers/char/mysr04.c gpio_button_drv_read line 49 [三 7月 27 09:15:17 2022 < 0.002369>] revice irq 200 [三 7月 27 09:15:17 2022 < 0.000042>] revice irq 200- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
果然是收到了两次中断。看来思路差不多。

驱动编写第二步—计算时间差值
继续优化。来计算一下两次中断的时间间隔。我们在中断中计算下时间差
static irqreturn_t my_sr04_echo_isr(int irq, void *dev_id) { int val = gpiod_get_value(my_sr04_gpios.echo); if (val) /* 上升沿 */ { /* 1. 记录数据 */ a = ktime_get_ns(); printk("revice irq up a=%llu\n",a); } else /* 下降沿 */ { b = ktime_get_ns(); printk("revice irq down b=%llu\n",b); printk("revice irq %llu\n",b-a); } return IRQ_HANDLED; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
pgg@raspberrypi:~/work/dirver $ sudo ./mysr04_user -r open file /dev/pgg_sr04 ok read driver: 0 APP read : pgg@raspberrypi:~/work/dirver $ sudo dmesg [ 4987.578948] drivers/char/mysr04.c gpio_button_drv_read line 51 [ 4987.581316] revice irq up a=4987648598062 [ 4987.581979] revice irq down b=4987649263185 [ 4987.581994] revice irq 665123 [ 5067.627410] drivers/char/mysr04.c gpio_button_drv_read line 51 [ 5067.629782] revice irq up a=5067699231916 [ 5067.630045] revice irq down b=5067699497079 [ 5067.630059] revice irq 265163 [ 5126.754375] drivers/char/mysr04.c gpio_button_drv_read line 51 [ 5126.756742] revice irq up a=5126827662096 [ 5126.767534] revice irq down b=5126838453813 [ 5126.767564] revice irq 10791717- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
[ 4987.581994] revice irq 665123这里是一个挡板,计算距离大概是10几厘米
[ 5067.630059] revice irq 265163这里是用手遮挡,大概三厘米左右
[ 5126.767564] revice irq 10791717 这里是计算到房顶的距离,大概1.8米。
感觉误差还是有的。暂时不管他。

驱动编写第三步—休眠唤醒
没事,先把整体完成,在用户侧直接返回时间差。还是通过休眠唤醒方式,传出数据。
中断函数,仅保留获得时间戳,然后唤醒read.static irqreturn_t my_sr04_echo_isr(int irq, void *dev_id) { int val = gpiod_get_value(my_sr04_gpios.echo); if (val) /* 上升沿 */ { a = ktime_get_ns(); } else /* 下降沿 */ { b = ktime_get_ns(); dataready = 1; wake_up_interruptible(&mysr04_wait); } return IRQ_HANDLED; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
读取函数中,传出计算出来的时间差
static ssize_t mysr0_drv_read (struct file *file, char __user *buf, size_t size, loff_t *offset) { char result[64]={0}; int reslen=0; static u64 c=0; printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__); a=0; b=0; dataready = 0; gpiod_set_value(my_sr04_gpios.trip,1); udelay(100); gpiod_set_value(my_sr04_gpios.trip,0); wait_event_interruptible(mysr04_wait, dataready); dataready = 0; c = b-a; sprintf(result,"%llu",c); reslen=strlen(result)+1; copy_to_user(buf, result, reslen); return reslen; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
注意这里的时间返回是纳秒。

驱动测试
用户侧函数,读取时间差,转化为long,然后再计算出距离。
int main(int argc, char **argv) { int fd; char buf[1024]; int len; int ret; /* 1. 判断参数 */ if (argc < 2) { printf(" %s -r\n", argv[0]); return -1; } /* 2. 打开文件 */ fd = open("/dev/pgg_sr04", O_RDWR); if (fd == -1) { printf("can not open file /dev/pgg_sr04\n"); return -1; } //printf("open file /dev/pgg_sr04 ok\n"); /* 3. 写文件或读文件 */ if ((0 == strcmp(argv[1], "-r")) && (argc == 2)) { len = read(fd, buf, 1024); buf[1023] = '\0'; printf("driver read : %s\n", buf); long res= strtol(buf, NULL, 0); double resm=0.00000017*((double)res); printf("sr04 距离 : %lf 米\n", resm); } else { printf(" %s -r\n", argv[0]); } close(fd); return 0; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
来吧展示

pgg@raspberrypi:~/work/dirver $ sudo ./mysr04_user -r driver read : 647500 sr04 距离 : 0.110075 米- 1
- 2
- 3
知识点
今天的知识点比较复杂,也比较多。
时间延迟
时间延迟分为了忙等待或者睡眠等待。前者死等,后者让出CPU,根据情况不同,分开使用。
可参考Leon_George《Linux内核中的延时函数详解》时间获取
内核中获取时间的函数如下
函数 功能 ktime_get_ns() 获取内核启动到现在的时间,在挂起时会暂停 ktime_get_boottime_ns() 获取内核启动到现在的时间,不受挂起影响,是绝对时间 ktime_get_real_ns() 获取Unix时间(1970年)到现在的时间,可能涉及闰秒更新,用得比较少 ktime_get_raw_ns() 类似ktime_get_ns(),不涉及闰秒更新,用得比较少 注意时间的类型,可能是u64,所以输出的时候,用%llu。

内核可用的字符操作函数
用户侧和内核用的字符串操作函数有所区别,详细可以参考墨染锦年syx的《linux 内核库函数》
可不要傻乎乎的直接调用用户侧之前的那些函数啊。

关键函数返回值判断
内核中有一些函数调用的时候,必须检查返回值,否则会报错,例如
static inline int __must_check request_irq(unsigned int irq, irq_handler_t handler, unsigned long flags, const char *name, void *dev) { return request_threaded_irq(irq, handler, NULL, flags, name, dev); }- 1
- 2
- 3
- 4
- 5
- 6
如果你没有检查,编译的时候,会提醒
warning: ignoring return value of ‘request_irq’, declared with attribute warn_unused_result [-Wunused-result]- 1

函数返回值
在error-base.h中定义了如下基础错误,在开发过程中,可以适当使用。
#ifndef _ASM_GENERIC_ERRNO_BASE_H #define _ASM_GENERIC_ERRNO_BASE_H #define EPERM 1 /* Operation not permitted */ #define ENOENT 2 /* No such file or directory */ #define ESRCH 3 /* No such process */ #define EINTR 4 /* Interrupted system call */ #define EIO 5 /* I/O error */ #define ENXIO 6 /* No such device or address */ #define E2BIG 7 /* Argument list too long */ #define ENOEXEC 8 /* Exec format error */ #define EBADF 9 /* Bad file number */ #define ECHILD 10 /* No child processes */ #define EAGAIN 11 /* Try again */ #define ENOMEM 12 /* Out of memory */ #define EACCES 13 /* Permission denied */ #define EFAULT 14 /* Bad address */ #define ENOTBLK 15 /* Block device required */ #define EBUSY 16 /* Device or resource busy */ #define EEXIST 17 /* File exists */ #define EXDEV 18 /* Cross-device link */ #define ENODEV 19 /* No such device */ #define ENOTDIR 20 /* Not a directory */ #define EISDIR 21 /* Is a directory */ #define EINVAL 22 /* Invalid argument */ #define ENFILE 23 /* File table overflow */ #define EMFILE 24 /* Too many open files */ #define ENOTTY 25 /* Not a typewriter */ #define ETXTBSY 26 /* Text file busy */ #define EFBIG 27 /* File too large */ #define ENOSPC 28 /* No space left on device */ #define ESPIPE 29 /* Illegal seek */ #define EROFS 30 /* Read-only file system */ #define EMLINK 31 /* Too many links */ #define EPIPE 32 /* Broken pipe */ #define EDOM 33 /* Math argument out of domain of func */ #define ERANGE 34 /* Math result not representable */ #endif- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
查看中断信息
通过命令
cat /proc/interrupts- 1
可以查看注册过的中断信息。

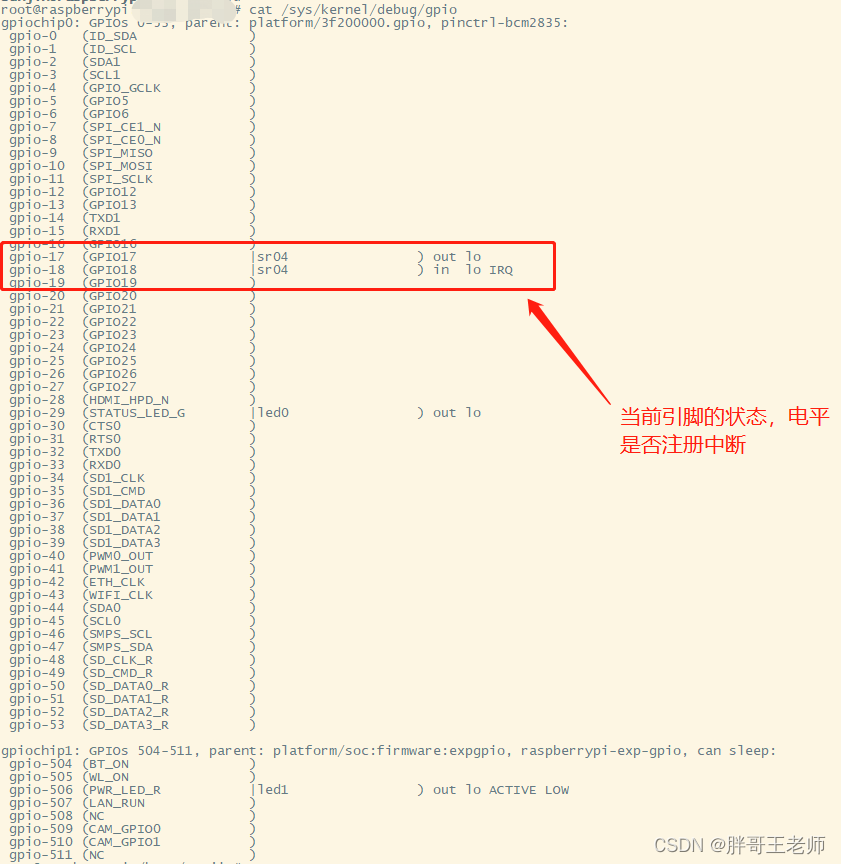
查看gpio信息
在root用户下,通过命令
cat /sys/kernel/debug/gpio- 1
可以查看当前各个GPIO的状态,电平,以及是否注册中断
最后注意
最后要注意的就是这个模块,VCC要用5V,开始接的3.3,怎么算时间都不对

结束语
男生的快乐真的就是很简单,能有自己的地方玩会游戏就好啊。

这马上就到七夕了,男生都喜欢电子产品,可不要直接送南孚电池啊。

-
相关阅读:
Live800:避开客服雷区,提升客服转化
推进数据要素化,数据云为何是“加速器”?
377. 组合总和 Ⅳ【完全背包】求排列数:外层for背包,内层for物品;求组合数:外层for物品,内层for背包;
AP5101C 高压线性恒流 LED电源驱动IC 3D打印机显示灯驱动器
springcloud整合nacos实现服务注册
【21天算法挑战赛】排序算法——希尔排序
1224. 最大相等频率(数组)
电脑键盘功能基础知识汇总
基于LSM树的存储机制简述
百度Mysql面试题总结
- 原文地址:https://blog.csdn.net/baidu_19348579/article/details/126006690