-
Turtlebot3-burger入门教程#foxy版#-雷达测试
系列文章目录
- Turtlebot3-burger入门教程#foxy版#-目录
- Turtlebot3-burger入门教程#foxy版#-硬件清单
- Turtlebot3-burger入门教程#foxy版#-软件清单
- Turtlebot3-burger入门教程#foxy版#-PC安装
- Turtlebot3-burger入门教程#foxy版#-树莓派4安装
- Turtlebot3-burger入门教程#foxy版#-OpenCR安装
- Turtlebot3-burger入门教程#foxy版#-网络设置
- Turtlebot3-burger入门教程#foxy版#-雷达测试
- Turtlebot3-burger入门教程#foxy版#-键盘控制
- Turtlebot3-burger入门教程#foxy版#-cartographer建图
- Turtlebot3-burger入门教程#foxy版#-slam toolbox建图
- Turtlebot3-burger入门教程#foxy版#-自主导航
说明:
- 本教程主要介绍如何测试雷达
相关设备
- TB3套件:采购地址
操作步骤
- [Turtlebot] 启动雷达
$ ros2 launch hls_lfcd_lds_driver hlds_laser.launch.py- [Remote PC] 启动RViz2
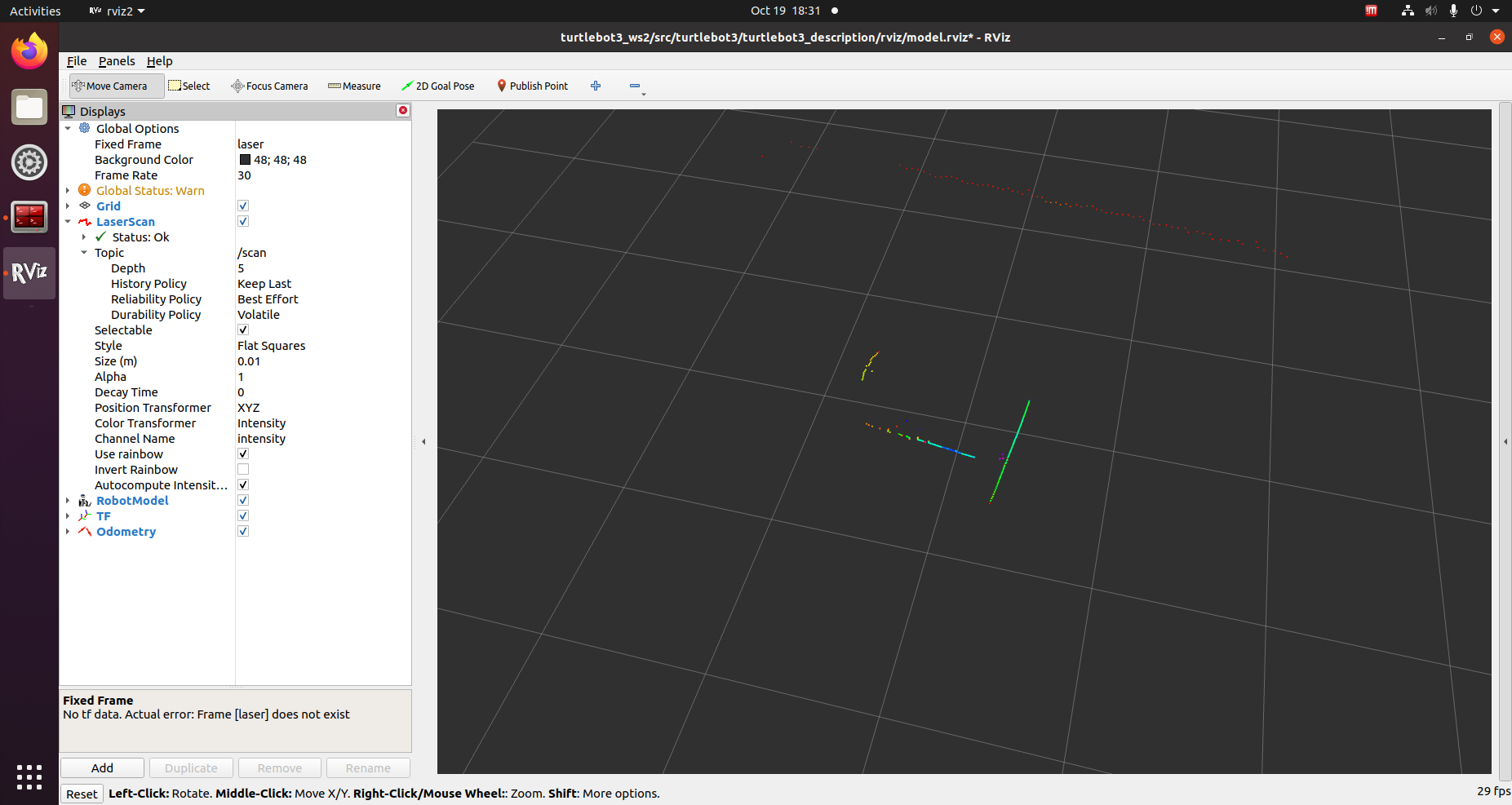
$ cd && rviz2 -d `colcon list --packages-select turtlebot3_description --paths-only`/rviz/model.rviz- 将RViz2左侧边栏的
Displays窗口的Fixed Frame一项的值改为laser,效果如下图所示
-
相关阅读:
使用Oracle自带SqlPlus导入导出数据库脚本
竞赛选题 深度学习卫星遥感图像检测与识别 -opencv python 目标检测
实测 ubuntu 20.04 使用 lidar_imu_calib 功能包 进行 激光雷达与imu标定
开源在线客服系统源码微信小程序
大数据环境搭建 —— VMware Workstation 安装详细教程
【SpringBoot】Spring常用注解总结
问卷答案的整理
.Net core web api 上传图片代码
Rstudio开不开了怎么办?R is taking longer to start than usual
Java开发:多线程编程
- 原文地址:https://blog.csdn.net/ncnynl/article/details/125800698