d3d12龙书阅读----绘制几何体(下)
本节在上一节的基础上,对整个绘制过程进行优化,将绘制单个几何体的内容拓展到了多个几何体,同时对根签名进行了进一步地探索。
帧资源
在之前绘制每帧的结尾,我们都要使用flushingcommandqueue方法,要一直等待gpu执行完所有命令,才会继续绘制下一帧,此时cpu处于空闲时间,同时,在绘制每一帧的初始阶段,gpu要等待cpu提交命令,此时gpu处于空闲时间
解决上述问题的一种方法是:
构建以cpu每帧都要更新的资源为数组元素的环形数组,这些资源被称为帧资源,一般循环数组由3个帧资源元素构成
当gpu在处理上一帧的命令时,cpu可以为下一帧更新资源,并构建并提交相应的命令列表,如果环形数组有三个元素,则令cpu比gpu提前处理两帧,这样可以确保gpu持续工作
帧资源定义:
针对每个物体/几何体的常量缓冲区定义
目前存储的是每个物体的世界矩阵 即 模型矩阵 将物体从局部坐标系转换到世界坐标系 代表着物体的位置
struct ObjectConstants
{
DirectX::XMFLOAT4X4 World = MathHelper::Identity4x4();
};
针对每次渲染过程(rendering pass)所要用到的数据
比如 观察矩阵 投影矩阵 时间 等等
struct PassConstants
{
DirectX::XMFLOAT4X4 View = MathHelper::Identity4x4();
DirectX::XMFLOAT4X4 InvView = MathHelper::Identity4x4();
DirectX::XMFLOAT4X4 Proj = MathHelper::Identity4x4();
DirectX::XMFLOAT4X4 InvProj = MathHelper::Identity4x4();
DirectX::XMFLOAT4X4 ViewProj = MathHelper::Identity4x4();
DirectX::XMFLOAT4X4 InvViewProj = MathHelper::Identity4x4();
DirectX::XMFLOAT3 EyePosW = { 0.0f, 0.0f, 0.0f };
float cbPerObjectPad1 = 0.0f;
DirectX::XMFLOAT2 RenderTargetSize = { 0.0f, 0.0f };
DirectX::XMFLOAT2 InvRenderTargetSize = { 0.0f, 0.0f };
float NearZ = 0.0f;
float FarZ = 0.0f;
float TotalTime = 0.0f;
float DeltaTime = 0.0f;
};
顶点定义
struct Vertex
{
DirectX::XMFLOAT3 Pos;
DirectX::XMFLOAT4 Color;
};
存储cpu为一帧构建命令列表所需资源
struct FrameResource
{
public:
FrameResource(ID3D12Device* device, UINT passCount, UINT objectCount);
FrameResource(const FrameResource& rhs) = delete;
FrameResource& operator=(const FrameResource& rhs) = delete;
~FrameResource();
每一帧都要有自己的命令分配器
因为当上一帧的gpu还在处理命令时 我们不能重置命令分配器
Microsoft::WRL::ComPtr CmdListAlloc;
同理 每个帧资源也要有自己的常量缓冲区
std::unique_ptr> PassCB = nullptr;
std::unique_ptr> ObjectCB = nullptr;
围栏点可以帮助检测 gpu是否仍然使用着帧资源
UINT64 Fence = 0;
};
可以看到我们在帧资源中将常量缓冲区分为pass 与 object, 这是基于资源的更新频率对常量资源进行分组,每次渲染过程我们都要更新pass缓冲区,而对于object来说,只有当发生变化的时候才需要更新,具体代码我们待会再看。
回到cpu与gpu的同步上来,首先创建初始化帧资源数组:
void ShapesApp::BuildFrameResources()
{
for(int i = 0; i < gNumFrameResources; ++i)
{
mFrameResources.push_back(std::make_unique(md3dDevice.Get(),
1, (UINT)mAllRitems.size()));
其中1代表着一个帧资源1个pass缓冲区 第二个是所有渲染物体的数目
}
}
cpu端更新第n帧:
void ShapesApp::Update(const GameTimer& gt)
{
OnKeyboardInput(gt);
UpdateCamera(gt);
循环帧资源数组
mCurrFrameResourceIndex = (mCurrFrameResourceIndex + 1) % gNumFrameResources;
mCurrFrameResource = mFrameResources[mCurrFrameResourceIndex].get();
等待gpu完成围栏点之前的所有命令
if(mCurrFrameResource->Fence != 0 && mFence->GetCompletedValue() < mCurrFrameResource->Fence)
{
HANDLE eventHandle = CreateEventEx(nullptr, false, false, EVENT_ALL_ACCESS);
ThrowIfFailed(mFence->SetEventOnCompletion(mCurrFrameResource->Fence, eventHandle));
WaitForSingleObject(eventHandle, INFINITE);
CloseHandle(eventHandle);
}
更新常量缓冲区
UpdateObjectCBs(gt);
UpdateMainPassCB(gt);
}
绘制第n帧:
void ShapesApp::draw(const GameTimer& gt){
添加围栏值 将命令标记到此围栏点
mCurrFrameResource->Fence = ++mCurrentFence;
向命令队列中添加一条设置新围栏点的命令
由于这条命令要交给gpu处理,所以gpu处理完signal之前的所有命令之前,它不会设置新的围栏点
mCommandQueue->Signal(mFence.Get(), mCurrentFence);
}
其实这种方法也有着缺陷,如果gpu处理命令的速度大于cpu提交命令列表的速度,则还是要等待cpu,理想的情况是cpu处理帧的速度大于gpu,这样cpu可以有空闲时间来处理游戏逻辑的其它部分,此方法的最大好处是cpu可以持续向gpu提供数据
渲染项
渲染项是一个轻量型结构 用于存储绘制物体所需要数据:
struct RenderItem
{
RenderItem() = default;
世界矩阵
XMFLOAT4X4 World = MathHelper::Identity4x4();
// 一个脏标记用于记录是否需要更新物体缓冲区 因为每个帧资源都有各自独立的物体缓冲区 所以脏标记的数目要设置和帧资源数目一致
int NumFramesDirty = gNumFrameResources;
// 当前渲染项对应object缓冲区索引
UINT ObjCBIndex = -1;
该渲染项参与绘制的几何体
MeshGeometry* Geo = nullptr;
//图元拓扑类型
D3D12_PRIMITIVE_TOPOLOGY PrimitiveType = D3D_PRIMITIVE_TOPOLOGY_TRIANGLELIST;
// DrawIndexedInstanced 方法的参数
UINT IndexCount = 0;
UINT StartIndexLocation = 0;
int BaseVertexLocation = 0;
};
渲染项的具体使用之后介绍
渲染过程中用到的常量数据
我们需要更新hlsl中用到的cbuffer:
cbuffer cbPerObject : register(b0)
{
float4x4 gWorld;
};
cbuffer cbPass : register(b1)
{
float4x4 gView;
float4x4 gInvView;
float4x4 gProj;
float4x4 gInvProj;
float4x4 gViewProj;
float4x4 gInvViewProj;
float3 gEyePosW;
float cbPerObjectPad1;
float2 gRenderTargetSize;
float2 gInvRenderTargetSize;
float gNearZ;
float gFarZ;
float gTotalTime;
float gDeltaTime;
};
更新object缓冲区 与 pass缓冲区 这里利用了前一节介绍的uploadbuffer的方法 从cpu端更新数据:
void ShapesApp::UpdateObjectCBs(const GameTimer& gt)
{
auto currObjectCB = mCurrFrameResource->ObjectCB.get();
for(auto& e : mAllRitems)
{
每个帧资源都需要更新物体缓冲区
if(e->NumFramesDirty > 0)
{
XMMATRIX world = XMLoadFloat4x4(&e->World);
ObjectConstants objConstants;
XMStoreFloat4x4(&objConstants.World, XMMatrixTranspose(world));
currObjectCB->CopyData(e->ObjCBIndex, objConstants);
// Next FrameResource need to be updated too.
e->NumFramesDirty--;
}
}
}
void ShapesApp::UpdateMainPassCB(const GameTimer& gt)
{
XMMATRIX view = XMLoadFloat4x4(&mView);
XMMATRIX proj = XMLoadFloat4x4(&mProj);
XMMATRIX viewProj = XMMatrixMultiply(view, proj);
XMMATRIX invView = XMMatrixInverse(&XMMatrixDeterminant(view), view);
XMMATRIX invProj = XMMatrixInverse(&XMMatrixDeterminant(proj), proj);
XMMATRIX invViewProj = XMMatrixInverse(&XMMatrixDeterminant(viewProj), viewProj);
XMStoreFloat4x4(&mMainPassCB.View, XMMatrixTranspose(view));
XMStoreFloat4x4(&mMainPassCB.InvView, XMMatrixTranspose(invView));
XMStoreFloat4x4(&mMainPassCB.Proj, XMMatrixTranspose(proj));
XMStoreFloat4x4(&mMainPassCB.InvProj, XMMatrixTranspose(invProj));
XMStoreFloat4x4(&mMainPassCB.ViewProj, XMMatrixTranspose(viewProj));
XMStoreFloat4x4(&mMainPassCB.InvViewProj, XMMatrixTranspose(invViewProj));
mMainPassCB.EyePosW = mEyePos;
mMainPassCB.RenderTargetSize = XMFLOAT2((float)mClientWidth, (float)mClientHeight);
mMainPassCB.InvRenderTargetSize = XMFLOAT2(1.0f / mClientWidth, 1.0f / mClientHeight);
mMainPassCB.NearZ = 1.0f;
mMainPassCB.FarZ = 1000.0f;
mMainPassCB.TotalTime = gt.TotalTime();
mMainPassCB.DeltaTime = gt.DeltaTime();
auto currPassCB = mCurrFrameResource->PassCB.get();
currPassCB->CopyData(0, mMainPassCB);
}
绘制多种几何体
在这里就不再介绍柱体 球体 正方体的过程 设计到一些几何知识
直接进入几何体的绘制阶段
创建顶点与索引缓冲区
将所有几何体的顶点缓冲区 与 索引缓冲区,合成一个大的顶点缓冲区与 索引缓冲区,之后使用drawindexinstanced方法绘制 需要记录每个几何体起始索引 索引数 以及起始顶点
void ShapesApp::BuildShapeGeometry()
{
GeometryGenerator geoGen;
GeometryGenerator::MeshData box = geoGen.CreateBox(1.5f, 0.5f, 1.5f, 3);
GeometryGenerator::MeshData grid = geoGen.CreateGrid(20.0f, 30.0f, 60, 40);
GeometryGenerator::MeshData sphere = geoGen.CreateSphere(0.5f, 20, 20);
GeometryGenerator::MeshData cylinder = geoGen.CreateCylinder(0.5f, 0.3f, 3.0f, 20, 20);
// 计算各几何体的起始顶点
UINT boxVertexOffset = 0;
UINT gridVertexOffset = (UINT)box.Vertices.size();
UINT sphereVertexOffset = gridVertexOffset + (UINT)grid.Vertices.size();
UINT cylinderVertexOffset = sphereVertexOffset + (UINT)sphere.Vertices.size();
// 存储起始索引
UINT boxIndexOffset = 0;
UINT gridIndexOffset = (UINT)box.Indices32.size();
UINT sphereIndexOffset = gridIndexOffset + (UINT)grid.Indices32.size();
UINT cylinderIndexOffset = sphereIndexOffset + (UINT)sphere.Indices32.size();
定义各子网格结构体
SubmeshGeometry boxSubmesh;
boxSubmesh.IndexCount = (UINT)box.Indices32.size();
boxSubmesh.StartIndexLocation = boxIndexOffset;
boxSubmesh.BaseVertexLocation = boxVertexOffset;
SubmeshGeometry gridSubmesh;
gridSubmesh.IndexCount = (UINT)grid.Indices32.size();
gridSubmesh.StartIndexLocation = gridIndexOffset;
gridSubmesh.BaseVertexLocation = gridVertexOffset;
SubmeshGeometry sphereSubmesh;
sphereSubmesh.IndexCount = (UINT)sphere.Indices32.size();
sphereSubmesh.StartIndexLocation = sphereIndexOffset;
sphereSubmesh.BaseVertexLocation = sphereVertexOffset;
SubmeshGeometry cylinderSubmesh;
cylinderSubmesh.IndexCount = (UINT)cylinder.Indices32.size();
cylinderSubmesh.StartIndexLocation = cylinderIndexOffset;
cylinderSubmesh.BaseVertexLocation = cylinderVertexOffset;
将各顶点 各索引合并
子网格合并为一个大的meshgeometry
auto totalVertexCount =
box.Vertices.size() +
grid.Vertices.size() +
sphere.Vertices.size() +
cylinder.Vertices.size();
std::vector vertices(totalVertexCount);
UINT k = 0;
for(size_t i = 0; i < box.Vertices.size(); ++i, ++k)
{
vertices[k].Pos = box.Vertices[i].Position;
vertices[k].Color = XMFLOAT4(DirectX::Colors::DarkGreen);
}
for(size_t i = 0; i < grid.Vertices.size(); ++i, ++k)
{
vertices[k].Pos = grid.Vertices[i].Position;
vertices[k].Color = XMFLOAT4(DirectX::Colors::ForestGreen);
}
for(size_t i = 0; i < sphere.Vertices.size(); ++i, ++k)
{
vertices[k].Pos = sphere.Vertices[i].Position;
vertices[k].Color = XMFLOAT4(DirectX::Colors::Crimson);
}
for(size_t i = 0; i < cylinder.Vertices.size(); ++i, ++k)
{
vertices[k].Pos = cylinder.Vertices[i].Position;
vertices[k].Color = XMFLOAT4(DirectX::Colors::SteelBlue);
}
std::vector indices;
indices.insert(indices.end(), std::begin(box.GetIndices16()), std::end(box.GetIndices16()));
indices.insert(indices.end(), std::begin(grid.GetIndices16()), std::end(grid.GetIndices16()));
indices.insert(indices.end(), std::begin(sphere.GetIndices16()), std::end(sphere.GetIndices16()));
indices.insert(indices.end(), std::begin(cylinder.GetIndices16()), std::end(cylinder.GetIndices16()));
const UINT vbByteSize = (UINT)vertices.size() * sizeof(Vertex);
const UINT ibByteSize = (UINT)indices.size() * sizeof(std::uint16_t);
auto geo = std::make_unique();
geo->Name = "shapeGeo";
ThrowIfFailed(D3DCreateBlob(vbByteSize, &geo->VertexBufferCPU));
CopyMemory(geo->VertexBufferCPU->GetBufferPointer(), vertices.data(), vbByteSize);
ThrowIfFailed(D3DCreateBlob(ibByteSize, &geo->IndexBufferCPU));
CopyMemory(geo->IndexBufferCPU->GetBufferPointer(), indices.data(), ibByteSize);
geo->VertexBufferGPU = d3dUtil::CreateDefaultBuffer(md3dDevice.Get(),
mCommandList.Get(), vertices.data(), vbByteSize, geo->VertexBufferUploader);
geo->IndexBufferGPU = d3dUtil::CreateDefaultBuffer(md3dDevice.Get(),
mCommandList.Get(), indices.data(), ibByteSize, geo->IndexBufferUploader);
geo->VertexByteStride = sizeof(Vertex);
geo->VertexBufferByteSize = vbByteSize;
geo->IndexFormat = DXGI_FORMAT_R16_UINT;
geo->IndexBufferByteSize = ibByteSize;
geo->DrawArgs["box"] = boxSubmesh;
geo->DrawArgs["grid"] = gridSubmesh;
geo->DrawArgs["sphere"] = sphereSubmesh;
geo->DrawArgs["cylinder"] = cylinderSubmesh;
mGeometries[geo->Name] = std::move(geo);
}
定义具体渲染项
在完成构建几何体之后 我们根据上一步创建的meshgeometry 来提取submeshgeometry 然后 里面的信息 根据需要创建相应的渲染项 并填写相应的内容
void ShapesApp::BuildRenderItems()
{
auto boxRitem = std::make_unique();
XMStoreFloat4x4(&boxRitem->World, XMMatrixScaling(2.0f, 2.0f, 2.0f)*XMMatrixTranslation(0.0f, 0.5f, 0.0f));
boxRitem->ObjCBIndex = 0;
boxRitem->Geo = mGeometries["shapeGeo"].get();
boxRitem->PrimitiveType = D3D_PRIMITIVE_TOPOLOGY_TRIANGLELIST;
boxRitem->IndexCount = boxRitem->Geo->DrawArgs["box"].IndexCount;
boxRitem->StartIndexLocation = boxRitem->Geo->DrawArgs["box"].StartIndexLocation;
boxRitem->BaseVertexLocation = boxRitem->Geo->DrawArgs["box"].BaseVertexLocation;
mAllRitems.push_back(std::move(boxRitem));
auto gridRitem = std::make_unique();
gridRitem->World = MathHelper::Identity4x4();
gridRitem->ObjCBIndex = 1;
gridRitem->Geo = mGeometries["shapeGeo"].get();
gridRitem->PrimitiveType = D3D_PRIMITIVE_TOPOLOGY_TRIANGLELIST;
gridRitem->IndexCount = gridRitem->Geo->DrawArgs["grid"].IndexCount;
gridRitem->StartIndexLocation = gridRitem->Geo->DrawArgs["grid"].StartIndexLocation;
gridRitem->BaseVertexLocation = gridRitem->Geo->DrawArgs["grid"].BaseVertexLocation;
mAllRitems.push_back(std::move(gridRitem));
UINT objCBIndex = 2;
for(int i = 0; i < 5; ++i)
{
auto leftCylRitem = std::make_unique();
auto rightCylRitem = std::make_unique();
auto leftSphereRitem = std::make_unique();
auto rightSphereRitem = std::make_unique();
XMMATRIX leftCylWorld = XMMatrixTranslation(-5.0f, 1.5f, -10.0f + i*5.0f);
XMMATRIX rightCylWorld = XMMatrixTranslation(+5.0f, 1.5f, -10.0f + i*5.0f);
XMMATRIX leftSphereWorld = XMMatrixTranslation(-5.0f, 3.5f, -10.0f + i*5.0f);
XMMATRIX rightSphereWorld = XMMatrixTranslation(+5.0f, 3.5f, -10.0f + i*5.0f);
XMStoreFloat4x4(&leftCylRitem->World, rightCylWorld);
leftCylRitem->ObjCBIndex = objCBIndex++;
leftCylRitem->Geo = mGeometries["shapeGeo"].get();
leftCylRitem->PrimitiveType = D3D_PRIMITIVE_TOPOLOGY_TRIANGLELIST;
leftCylRitem->IndexCount = leftCylRitem->Geo->DrawArgs["cylinder"].IndexCount;
leftCylRitem->StartIndexLocation = leftCylRitem->Geo->DrawArgs["cylinder"].StartIndexLocation;
leftCylRitem->BaseVertexLocation = leftCylRitem->Geo->DrawArgs["cylinder"].BaseVertexLocation;
此处省略
}
for(auto& e : mAllRitems)
mOpaqueRitems.push_back(e.get());
}
定义常量缓冲区视图
之后由于我们现在有3个pass常量缓冲区 3n个object常量缓冲区 总共3n+3个常量缓冲区 所以就需要 3n+3个cbv 同时也要拓展描述符堆的大小:
void ShapesApp::BuildDescriptorHeaps()
{
UINT objCount = (UINT)mOpaqueRitems.size();
UINT numDescriptors = (objCount+1) * gNumFrameResources;
mPassCbvOffset = objCount * gNumFrameResources;
D3D12_DESCRIPTOR_HEAP_DESC cbvHeapDesc;
cbvHeapDesc.NumDescriptors = numDescriptors;
cbvHeapDesc.Type = D3D12_DESCRIPTOR_HEAP_TYPE_CBV_SRV_UAV;
cbvHeapDesc.Flags = D3D12_DESCRIPTOR_HEAP_FLAG_SHADER_VISIBLE;
cbvHeapDesc.NodeMask = 0;
ThrowIfFailed(md3dDevice->CreateDescriptorHeap(&cbvHeapDesc,
IID_PPV_ARGS(&mCbvHeap)));
}
void ShapesApp::BuildConstantBufferViews()
{
UINT objCBByteSize = d3dUtil::CalcConstantBufferByteSize(sizeof(ObjectConstants));
UINT objCount = (UINT)mOpaqueRitems.size();
每个帧资源中的每个object都需要一个cbv
for(int frameIndex = 0; frameIndex < gNumFrameResources; ++frameIndex)
{
auto objectCB = mFrameResources[frameIndex]->ObjectCB->Resource();
for(UINT i = 0; i < objCount; ++i)
{
D3D12_GPU_VIRTUAL_ADDRESS cbAddress = objectCB->GetGPUVirtualAddress();
// 每个物体的偏移
cbAddress += i*objCBByteSize;
// 计算在描述符堆中的偏移
int heapIndex = frameIndex*objCount + i;
auto handle = CD3DX12_CPU_DESCRIPTOR_HANDLE(mCbvHeap->GetCPUDescriptorHandleForHeapStart());
handle.Offset(heapIndex, mCbvSrvUavDescriptorSize);
D3D12_CONSTANT_BUFFER_VIEW_DESC cbvDesc;
cbvDesc.BufferLocation = cbAddress;
cbvDesc.SizeInBytes = objCBByteSize;
md3dDevice->CreateConstantBufferView(&cbvDesc, handle);
}
}
UINT passCBByteSize = d3dUtil::CalcConstantBufferByteSize(sizeof(PassConstants));
每个帧资源都要一个pass 描述符
for(int frameIndex = 0; frameIndex < gNumFrameResources; ++frameIndex)
{
auto passCB = mFrameResources[frameIndex]->PassCB->Resource();
D3D12_GPU_VIRTUAL_ADDRESS cbAddress = passCB->GetGPUVirtualAddress();
计算偏移
int heapIndex = mPassCbvOffset + frameIndex;
auto handle = CD3DX12_CPU_DESCRIPTOR_HANDLE(mCbvHeap->GetCPUDescriptorHandleForHeapStart());
handle.Offset(heapIndex, mCbvSrvUavDescriptorSize);
D3D12_CONSTANT_BUFFER_VIEW_DESC cbvDesc;
cbvDesc.BufferLocation = cbAddress;
cbvDesc.SizeInBytes = passCBByteSize;
md3dDevice->CreateConstantBufferView(&cbvDesc, handle);
}
}
绘制
最后一步是绘制每个渲染项 :
void ShapesApp::DrawRenderItems(ID3D12GraphicsCommandList* cmdList, const std::vector& ritems)
{
UINT objCBByteSize = d3dUtil::CalcConstantBufferByteSize(sizeof(ObjectConstants));
auto objectCB = mCurrFrameResource->ObjectCB->Resource();
for(size_t i = 0; i < ritems.size(); ++i)
{
auto ri = ritems[i];
cmdList->IASetVertexBuffers(0, 1, &ri->Geo->VertexBufferView());
cmdList->IASetIndexBuffer(&ri->Geo->IndexBufferView());
cmdList->IASetPrimitiveTopology(ri->PrimitiveType);
UINT cbvIndex = mCurrFrameResourceIndex*(UINT)mOpaqueRitems.size() + ri->ObjCBIndex;
auto cbvHandle = CD3DX12_GPU_DESCRIPTOR_HANDLE(mCbvHeap->GetGPUDescriptorHandleForHeapStart());
cbvHandle.Offset(cbvIndex, mCbvSrvUavDescriptorSize);
cmdList->SetGraphicsRootDescriptorTable(0, cbvHandle);
cmdList->DrawIndexedInstanced(ri->IndexCount, 1, ri->StartIndexLocation, ri->BaseVertexLocation, 0);
}
}
细探根签名
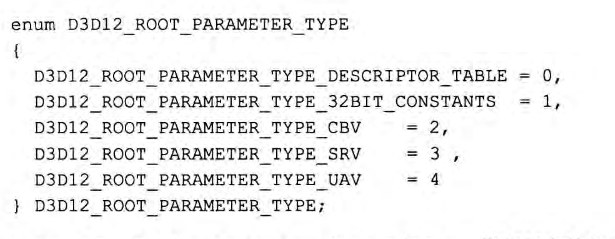
根签名由一系列根参数构成 根参数主要有以下三种类型

我们可以创建出任意组合的根签名 只要不超过64 DWORD大小 根常量使用方便 无需使用相应的常量缓冲区 与 cbv堆,但是假如我们使用根常量存储mvp矩阵,16个float元素需要16个DWORD 即需要16个根常量 大幅消耗了根签名的空间 所以在使用时我们要灵活组合
根签名结构体定义:
typedef struct D3D12_ROOT_PARAMETER
{
D3D12_ROOT_PARAMETER_TYPE ParameterType;
union
{
D3D12_ROOT_DESCRIPTOR_TABLE DescriptorTable;
D3D12_ROOT_CONSTANTS Constants;
D3D12_ROOT_DESCRIPTOR Descriptor;
} ;
D3D12_SHADER_VISIBILITY ShaderVisibility;
} D3D12_ROOT_PARAMETER;
其中ParameterType的定义是根参数的类型,包括描述符表,根常量,cbv根描述符,srv根描述符,uav根描述符:
ShaderVisibility代表着着色器可见性:

创建 DescriptorTable Constants Descriptor
DescriptorTable :
描述符表的定义可以借助CD3DX12_DESCRIPTOR_RANGE的init方法
struct CD3DX12_DESCRIPTOR_RANGE : public D3D12_DESCRIPTOR_RANGE
{
CD3DX12_DESCRIPTOR_RANGE() { }
explicit CD3DX12_DESCRIPTOR_RANGE(const D3D12_DESCRIPTOR_RANGE &o) :
D3D12_DESCRIPTOR_RANGE(o)
{}
CD3DX12_DESCRIPTOR_RANGE(
D3D12_DESCRIPTOR_RANGE_TYPE rangeType,
UINT numDescriptors,
UINT baseShaderRegister,
UINT registerSpace = 0,
UINT offsetInDescriptorsFromTableStart =
D3D12_DESCRIPTOR_RANGE_OFFSET_APPEND)
{
Init(rangeType, numDescriptors, baseShaderRegister, registerSpace, offsetInDescriptorsFromTableStart);
}
inline void Init(
D3D12_DESCRIPTOR_RANGE_TYPE rangeType,
UINT numDescriptors,
UINT baseShaderRegister,
UINT registerSpace = 0,
UINT offsetInDescriptorsFromTableStart =
D3D12_DESCRIPTOR_RANGE_OFFSET_APPEND)
{
Init(*this, rangeType, numDescriptors, baseShaderRegister, registerSpace, offsetInDescriptorsFromTableStart);
}
}
其中D3D12_DESCRIPTOR_RANGE_TYPE rangeType定义为:

numDescriptors代表着范围内描述符的数量
baseShaderRegister:

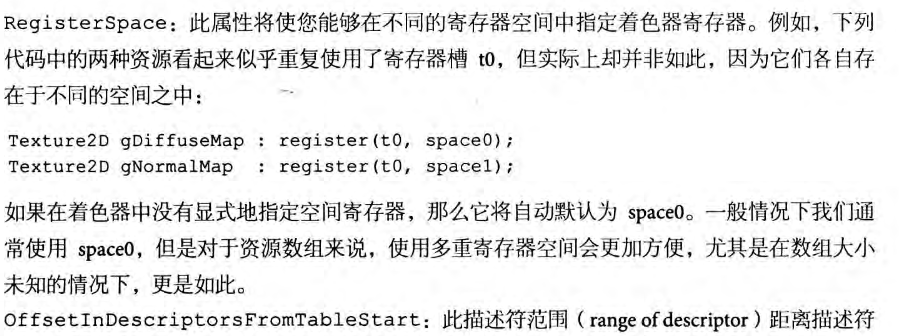
然后使用InitAsDescriptorTable创建 :
CD3DX12_DESCRIPTOR_RANGE cbvTable0;
cbvTable0.Init(D3D12_DESCRIPTOR_RANGE_TYPE_CBV, 1, 0);
CD3DX12_DESCRIPTOR_RANGE cbvTable1;
cbvTable1.Init(D3D12_DESCRIPTOR_RANGE_TYPE_CBV, 1, 1);
CD3DX12_ROOT_PARAMETER slotRootParameter[2];
slotRootParameter[0].InitAsDescriptorTable(1, &cbvTable0);
slotRootParameter[1].InitAsDescriptorTable(1, &cbvTable1);
根描述符与根常量的定义可以直接使用如下方法创建:
static inline void InitAsConstants(
_Out_ D3D12_ROOT_PARAMETER &rootParam,
UINT num32BitValues,
UINT shaderRegister,
UINT registerSpace = 0,
D3D12_SHADER_VISIBILITY visibility = D3D12_SHADER_VISIBILITY_ALL)
{
rootParam.ParameterType = D3D12_ROOT_PARAMETER_TYPE_32BIT_CONSTANTS;
rootParam.ShaderVisibility = visibility;
CD3DX12_ROOT_CONSTANTS::Init(rootParam.Constants, num32BitValues, shaderRegister, registerSpace);
}
static inline void InitAsConstantBufferView(
_Out_ D3D12_ROOT_PARAMETER &rootParam,
UINT shaderRegister,
UINT registerSpace = 0,
D3D12_SHADER_VISIBILITY visibility = D3D12_SHADER_VISIBILITY_ALL)
{
rootParam.ParameterType = D3D12_ROOT_PARAMETER_TYPE_CBV;
rootParam.ShaderVisibility = visibility;
CD3DX12_ROOT_DESCRIPTOR::Init(rootParam.Descriptor, shaderRegister, registerSpace);
}
例子:


不同类型的根签名绑定着色器寄存器
将不同类型的根签名绑定着色器寄存器需要使用不同的命令:
根常量:ID3D12GraphicsCommandList::SetComputeRoot32BitConstants
https://learn.microsoft.com/zh-cn/windows/win32/api/d3d12/nf-d3d12-id3d12graphicscommandlist-setcomputeroot32bitconstants
根描述符:ID3D12GraphicsCommandList::SetComputeRootConstantBufferView
https://learn.microsoft.com/zh-cn/windows/win32/api/d3d12/nf-d3d12-id3d12graphicscommandlist-setcomputerootconstantbufferview
描述符表:ID3D12GraphicsCommandList::SetComputeRootDescriptorTable
https://learn.microsoft.com/zh-cn/windows/win32/api/d3d12/nf-d3d12-id3d12graphicscommandlist-setcomputerootdescriptortable
其中根常量与根描述符都不需要涉及描述符堆