-
QT实现凸凹边形等距缩放
参考:https://blog.csdn.net/weixin_39383896/article/details/99615371和https://blog.csdn.net/qq_15821883/article/details/117421400
在几位大佬的算法上做了一些优化和一些bug修复。


代码逻辑思路:
1、获取向量AB、BC的坐标。
2、计算向量AB、BC的长度。
3、根据点乘获取cosθ大小。
4、根据cosθ大小判断夹角为钝角还是锐角。
5、如果小于等于90度,根据缩放距离、夹角和等间距求缩放后的点位置。
6、如果大于90度,根据叉积公式判断多边形为凸边形还是凹变形。
7、判断凸凹边形后,根据缩放距离、夹角和等间距求缩放后的点位置。
实现结果:
凹多边形
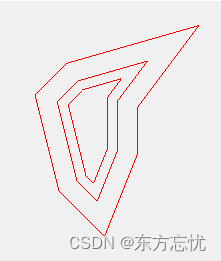

凸多边形


Qt实现代码:
QVector<QPointF> UTool::calcPoint(const QVector<QPointF> &datas, double sec_dis) { QVector<double> x; QVector<double> y; int number = datas.size(); if (number < 3) { return QVector<QPointF>(); } for (int i = 0; i < number; ++i) { x.append(datas[i].x()); y.append(datas[i].y()); } QVector<QPointF> points; for (int i = 0; i < number; ++i) { // 向量AB double x1 = x[i % number] - x[(i - 1 + number) % number]; double y1 = y[i % number] - y[(i - 1 + number) % number]; // 向量BC double x2 = x[i % number] - x[(i + 1)% number]; double y2 = y[i % number] - y[(i + 1)% number]; // 求线段的长度 double d1 = sqrt(x1*x1 + y1 * y1); double d2 = sqrt(x2*x2 + y2 * y2); // 点乘 double ab = x1 * x2 + y1 * y2; // cosθ = A * B / (|A| * |B|) double cosA = ab / (d1 * d2); // 求sinA double sinA; if (cosA > 0) // 表示夹角0-90度 锐角 { // 判断凹凸点(叉积) double P1P3_x = x[(i + 1) % number] - x[i]; double P1P3_y = y[(i + 1) % number] - y[i]; double P1P2_x = x[i] - x[(i - 1 + number) % number]; double P1P2_y = y[i] - y[(i - 1 + number) % number]; double P = (P1P3_y*P1P2_x) - (P1P3_x*P1P2_y); double dv1 = sec_dis / sinA; if (P > 0) { sinA = -sqrt(1 - cosA * cosA); dv1 = -sec_dis / sinA; } else { sinA = -sqrt(1 - cosA * cosA); dv1 = sec_dis / sinA; } // # 向量V1,V2的坐标 double v1_x = (dv1 / d1) * x1; double v1_y = (dv1 / d1) * y1; double v2_x = (dv1 / d2) * x2; double v2_y = (dv1 / d2) * y2; double PiQi_x = v1_x + v2_x; double PiQi_y = v1_y + v2_y; double Qi_x = PiQi_x + x[i]; double Qi_y = PiQi_y + y[i]; points.append(QPointF(Qi_x, Qi_y)); } else if(cosA < 0) // 钝角 钝角分为外钝角和 内钝角 { // 判断凹凸点(叉积) double P1P3_x = x[(i + 1) % number] - x[i]; double P1P3_y = y[(i + 1) % number] - y[i]; double P1P2_x = x[i] - x[(i - 1 + number) % number]; double P1P2_y = y[i] - y[(i - 1 + number) % number]; double P = (P1P3_y*P1P2_x) - (P1P3_x*P1P2_y); // 为凹 if (P < 0) { sinA = -sqrt(1 - cosA * cosA); double dv1 = sec_dis / sinA; double v1_x = (dv1 / d1) * x1; double v1_y = (dv1 / d1) * y1; double v2_x = (dv1 / d2) * x2; double v2_y = (dv1 / d2) * y2; double PiQi_x = v1_x + v2_x; double PiQi_y = v1_y + v2_y; double Qi_x = PiQi_x + x[i]; double Qi_y = PiQi_y + y[i]; points.append(QPointF(Qi_x, Qi_y)); } else if (P > 0) // 为凸 { sinA = -sqrt(1 - cosA * cosA); double dv1 = -sec_dis / sinA; double v1_x = (dv1 / d1) * x1; double v1_y = (dv1 / d1) * y1; double v2_x = (dv1 / d2) * x2; double v2_y = (dv1 / d2) * y2; double PiQi_x = v1_x + v2_x; double PiQi_y = v1_y + v2_y; double Qi_x = PiQi_x + x[i]; double Qi_y = PiQi_y + y[i]; points.append(QPointF(Qi_x, Qi_y)); } else // error { return QVector<QPointF>(); } } else if(cosA == 0) { // 判断凹凸点(叉积) double P1P3_x = x[(i + 1) % number] - x[i]; double P1P3_y = y[(i + 1) % number] - y[i]; double P1P2_x = x[i] - x[(i - 1 + number) % number]; double P1P2_y = y[i] - y[(i - 1 + number) % number]; double P = (P1P3_y*P1P2_x) - (P1P3_x*P1P2_y); double dv1; if (P > 0) { sinA = -sqrt(1 - cosA * cosA); dv1 = -sec_dis / sinA; } else { sinA = -sqrt(1 - cosA * cosA); dv1 = sec_dis / sinA; } double v1_x = (dv1 / d1) * x1; double v1_y = (dv1 / d1) * y1; double v2_x = (dv1 / d2) * x2; double v2_y = (dv1 / d2) * y2; double PiQi_x = v1_x + v2_x; double PiQi_y = v1_y + v2_y; double Qi_x = PiQi_x + x[i]; double Qi_y = PiQi_y + y[i]; points.append(QPointF(Qi_x, Qi_y)); } } return points; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
-
相关阅读:
【C++】数组和指针的爱恨情仇。。。
大企业与小企业在信息安全体系建设中的区别
超分辨率重建DRCN
儿童三轮自行车外观及结构设计(lunwen+任务书+开题+文综+翻译及原文+三维模型)
免费听歌软件,音乐搜索APP:掌中的音乐宝库,为您的音乐生活增添色彩
C#winform导出DataGridView数据到Excel表
一些 Conda 的常用命令
(附源码)计算机毕业设计SSM基于的防疫隔离服务系统
【七】http服务器开发--客户端请求格式和服务器响应格式
pdfh5在线预览pdf文件
- 原文地址:https://blog.csdn.net/weixin_43246170/article/details/133877167