-
codesys自由编码器
1编码器作用:
用于位置处理。

2它的属性: SMC_FreeEncoder.diEncoderPosition 【DINT】 int32
SMC_FreeEncoder_1.diEncoderPosition := GVL.电位器1;


SMC_FreeEncoder.diEncoderPosition:=hsi_cnt.diCurCountValue; //编码器位置3位置显示:

- 这样给编码器 1000【脉冲当量】 ,编码器转1圈
- SMC_FreeEncoder_1.diEncoderPosition := 1000; // 脉冲当量


- 【模数】和【有限】是2选1
- 选了模数后,只有【移动距离mm】和【圈数】有效。
- 默认 移动360.00mm为一圈
【默认一圈是360.00毫米】 SMC_FreeEncoder.diEncoderPosition:=360; // 【int32】

给它赋值,它就能旋转。每过360毫米就转完一圈。
但这并不是自己想要的,以导程5.00mm【毫米】为例,需要如下调整:

如果想设置【5】让它转一圈:

模数:转一圈对应的值。// 这个只用来【可视化】的显示。
如果想设置【5万】让它转一圈:SMC_FreeEncoder.diEncoderPosition:=50000; // 【int32】
【增量】与【应用的单元】的比值是 diEncoderPosition与【实际值】的比值。
 电子齿轮比可以简化的【50000:5】等于【10000:1】
电子齿轮比可以简化的【50000:5】等于【10000:1】注:5万对应坐标5.00毫米 //.diEncoderPosition:=50000;
- 当给编码器赋值位置时,发现编码器不动,原因是默认 16#20000 不对。
- 要按实际情况赋值。我一般是1万【脉冲当量】对应1mm毫米长度。
4一般以高速输入脉冲计来标记编码器位置:

- // QQ750273008 // 禾川Q---高速计数器
- // 硬件引脚:【A】【B】【Z】【锁存】 // Falling下降沿
- // 功能:【比较】【脉冲密度】【锁存】【重载】 //[Z]引脚用于重载值刷新
- // 输出:【密度值】【当前计数值】【锁存值】【计数器状态字】
- hsi_cnt(
- //【1】通道
- wDriveID:= 0, //【WORD】通道0~7,hsi_cnt到【hsi_cnt_7】
- //【2】计数总开关
- bCounterEnable:= 1 , //【BOOL】计数器功能使能位,高电平有效
- diCntMinValue:= -1000, //【DINT】 【当前计数值最小值 】
- diCntMaxValue:= 999, //【DINT】 【当前计数值最大值 】
- // 计数模式
- wCountMode:= 2#0011,//【模式3】 //【WORD】计数模式与计数极性设置, bit[3] : 计数极性配置 ,bit[2:0] : 计数模式配置
- //[0]AB脉冲1倍速【A高电平时:B上升沿加,B下降沿减】
- //[1]AB脉冲2倍速
- //[2]AB脉冲4倍速
- //[3]【B脉冲加,A脉冲减 】 // 1相位2输入脚【上升沿】
- //[4]B脉冲,【引脚A低加高减】 // 1相位1硬件模式输入脚【B负责脉冲,A负责加减方向】
- //[5]B脉冲,【bSoftDirection】低加高减 // 1相位1软件模式输入脚
- bSoftDirection:= , //【BOOL】计数模式[5]时有效,低加高减
- //【3】比较值事件
- bEventEnable:=0 , //【BOOL】比较事件触发使能位,高电平有效 【产品打包计数】
- diEventCmpValue:= , //【DINT】比较值【比较计数值】,diEventCmpValue==diCurCountValue时, 将触发计数器比较一致事件
- //【4】脉冲密度
- bDspdEnable:=1 , //【BOOL】脉冲密度使能位,高电平有效,,,脉冲密度测量,单位时间设置【单位ms】
- wMeasureUnitTime:=1000 , //【WORD】脉冲密度测量,单位时间设置【单位ms】 // 单位时间内,获取脉冲数量
- //【5】锁存引脚 【和】Z脉冲脚
- bLatchEnable:=1 , //【BOOL】锁存开关,高电平有效,硬件脚触发,标记计数位置
- wHardTrgMethod:=2#010001 , //【WORD】硬件触发端子,bit[6:4]: Latch【锁存端子】检查设置 ,bit[2:0]: 【Z相端子】检查设置
- // [0]边沿检测失能
- // [1]上升沿触发有效 【0001】
- // [2]下降沿触发有效 【0010】
- // [3]升降沿触发有效
- //【注:】Z脉冲用于刷新重载值
- bSoftPreTrg:= , //【BOOL】触发【重载】 当该位由0->1时,diSoftPreValue将被写入到diCurCountValue
- //【重载值】:填编码器圈脉冲
- diSoftPreValue:=1000 , //【DINT】计数【重载值】 ,当前计数预置值,Z相或【bSoftPreTrg】预置触发后, 该数值将被写入diCurCountValue
- BZport_sel:= 6, //【BYTE】 Z相端子选择
- // 0 : X0将被选择作为Z相端子
- // 1 : X1将被选择作为Z相端子
- // ........
- // 15 : X15将被选择作为Z相端子
- Blatch_sel:= 7, //【BYTE】 锁存端子选择
- // 0 : X0将被选择作为【锁存】端子
- // 1 : X1将被选择作为【锁存】端子
- // ........
- // 15 : X15将被选择作为【锁存】端子 // 16为其他端子
- //【6】备用
- wCmpoutCtrlword:= , //【WORD】 // 预留,v103版本支持
- // 【7】 状态字
- wStatus_clr:= , //【WORD】状态位清除字
- // bit0 预留
- // bit1 预留
- // bit2 锁存完成标记清除
- // bit3 硬件预置数触发完成标记清除
- // bit4 软件预置数触发完成标记清除
- // bit5 计数器下溢标记清除
- // bit6 计数器上溢标记清除
- // bit7 预留
- // bit8 比较中断触发标记清除
- // bit9 脉冲密度测量完成标记清除
- //
- bTabCmpEnable:= , //【BOOL】
- wStartNum:= , //【WORD】
- wEndNum:= , //【WORD】
- //========================================
- // C1脉冲密度:DINT;
- // C2当前计数值:DINT;
- // C3锁存值:DINT;
- // C4计数器状态字:WORD;
- diDspdFreqValue=> C1脉冲密度, //【DINT】 脉冲密度测量值
- diCurCountValue=> C2当前计数值 , //【DINT】 当前计数值
- diLatchData=> C3锁存值, //【DINT】 锁存值
- wCounterStatus=> C4计数器状态字); //【WORD】 计数器状态字
- //bit0: 计数器工作状态
- //bit1: 预留
- //bit2: 锁存完成标记
- //bit3: 硬件预置数触发完成
- //bit4: 软件预置数触发完成
- //bit5: 计数器下溢标记
- //bit6: 计数器上溢标记
- //bit7: 当前计数方向
- //bit8: 比较中断触发标记
- //bit9: 脉冲密度测量完成标记
- //
- //
- SMC_FreeEncoder.diEncoderPosition:=hsi_cnt.diCurCountValue; //编码器位置
- //SMC_FreeEncoder.diEncoderPosition:=GVL.电位器1;
禾川的高速输入确实比较难用。不如汇川那样图形化编程。

【注】 wHardTrgMethod:=2#00010001 , // 上升沿触发

5位置同步:【带虚轴】

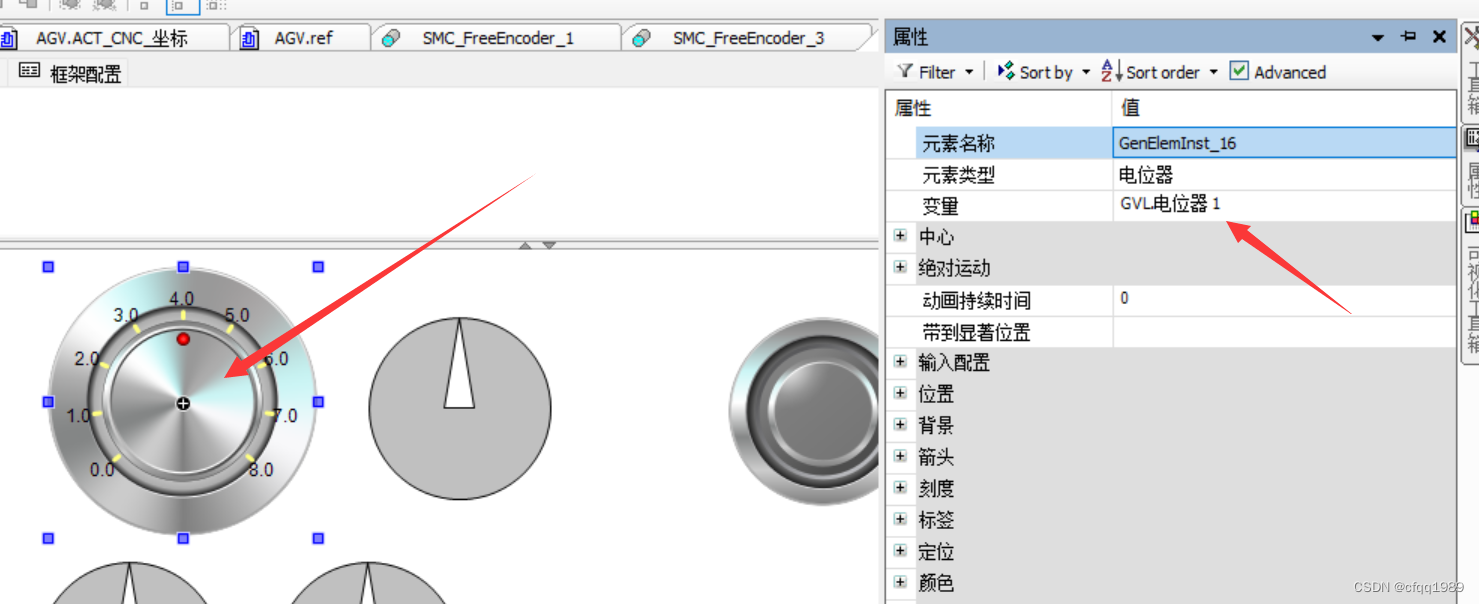
6电位器控制编码器:

设置一圈值:
- 绑定控件后,默认走360.00转一圈
- 可以设置5.00转一圈【可以实现导程5mm同步】

比例缩放:这个用于编码器转一圈,发给下位机的脉冲当量。
3编码器带虚轴:





- 自由编码器的一圈:填采集的一圈脉冲量。【比如 手轮100脉】
- 虚轴A的一圈:填编码器的一圈【虚轴A要设置成模数】
- 虚轴B的一圈:这里用齿轮比。因为2个虚轴之间可以实现电子齿轮比。【虚轴B要设置成有限】
-
相关阅读:
vpp安装与使用
Ubuntu服务器配置qq邮箱发送信息
C语言的头文件
Spring Cloud Stream 消息驱动基础入门与实践总结
cv::solvePnP使用方法及注意点详解(OpenCV/C++)
libvirt vcpu热插拔报错:failed to find appropriate hotpluggable vcpus
5.Maven实战 --- 坐标和依赖
JVM的默认内存是怎么分配的?
如何使用U盘重装系统?
kettle从入门到精通 第六十六课 ETL之kettle kettle阻塞教程,轻松获取最后一行数据,so easy
- 原文地址:https://blog.csdn.net/cfqq1989/article/details/132923644
