-
双目立体视觉
#理想模型图

其中: b 为基线,即两个相机原点之间的距离 ;
fl和fr 分别为左右相机的焦距,理想的双目相机fl=fr=f ;
cl和cr 分别为左右相机的光心,理想的双目相机cl=cr ;
xl和xr 分别为空间中的一点P投影在左右相机的图像中的横坐标 ;

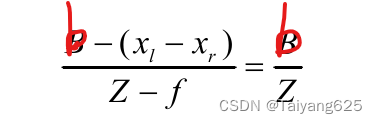
则根据几何关系,可以得到:

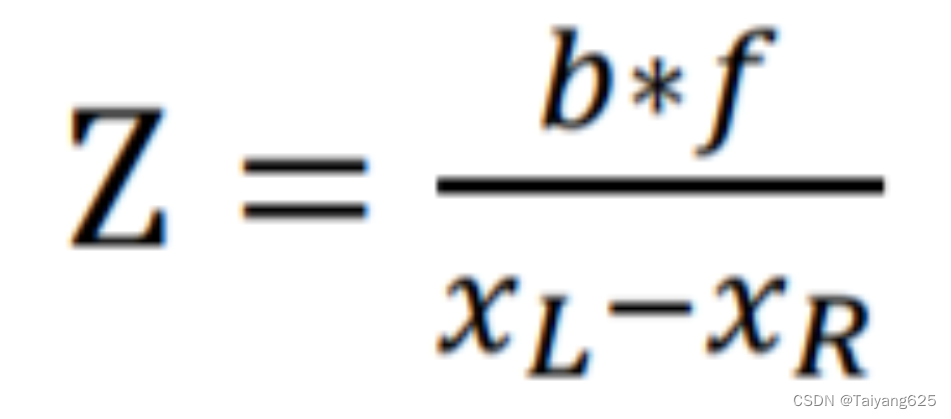
整理得:


视差原理

两个相机的投影中心的连线的距离为 b,也叫做基线,三维空间任意一点 P 在左相机的成像点为 PL,在右相机的成像点为PR。根据光的直线传播的原理可知,三维空间点 P 就是两个相机的投影中心点与成像点连线的交点。线段𝑥L和𝑥R分别是左右相机成像点到左成像面的距离,
则点 P 在左右相机的视差可以定义如下:

两个成像点PL和PR之间的距离为:

根据相似三角形理论可以得出:
则可以得到点 P 到投影中心平面的距离Z:
-
相关阅读:
Qt 为Android app添加系统签名
49 二叉树的最近公共祖先
中文编程软件视频推荐,自学编程电脑推荐,中文编程开发语言工具下载
ST‐LINK V2 使用说明(安装,调试,烧录)
浅谈 Raft 分布式一致性协议|图解 Raft
网络安全(黑客)自学
ChatGLM系列八:微调医疗问答系统
ArduinoUNO实战-第二十一章-通过调整电位器来改变9克舵机的角度
半个月时间把MySQL重新巩固了一遍,梳理了一篇几万字 “超硬核” 文章!
计算机毕业设计论文_s2sh+mysql问卷调查系统|投票项目源码
- 原文地址:https://blog.csdn.net/Taiyang625/article/details/132836853