Note:[ wechat:Y466551 | 可加勿骚扰,付费咨询 ]
论文信息
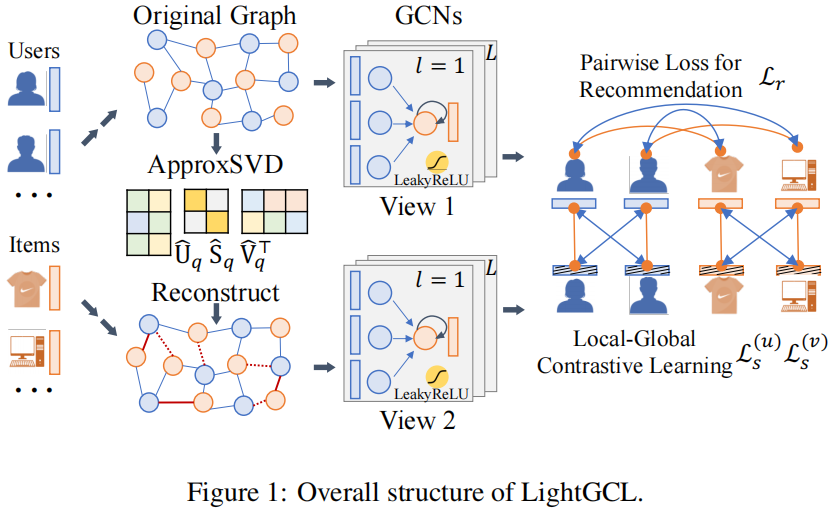
论文标题:LightGCL: Simple Yet Effective Graph Contrastive Learning for Recommendation
论文作者:Cai, Xuheng and Huang, Chao and Xia, Lianghao and Ren, Xubin
论文来源:2023 ICLR
论文地址:download
论文代码:download
视屏讲解:click
1 介绍
出发点:现有图对比推荐方法主要么对用户-项目交互图执行随机增强(例如,节点/边缘扰动),要么依赖于基于启发式的增强技术(例如,用户聚类)来生成对比视图。本文认为这些方法不能很好的保存图内部的语义结构,而且容易收到噪声的干扰;
贡献:
-
- 在本文中,我们通过设计一个轻量级和鲁棒的图对比学习框架来增强推荐系统,以解决与该任务相关的关键挑战;
- 我们提出了一种有效的对比学习范式用于图的增强。通过全球协作关系的注入,我们的模型可以缓解不准确的对比信号所带来的问题;
- 与现有的基于gcl的方法相比,我们的方法提高了训练效率;
- 在几个真实数据集上进行的大量实验证明了我们的LightGCL的性能优势。深入的分析证明了LightGCL的合理性和稳健性;
2 方法
2.1 模型框架
2.2 局部图依赖关系建模
使用一个 两层的 GCN 捕获用户-物品之间的局部关系:
z(u)i,l=σ(p(˜Ai,:)⋅E(v)l−1),z(v)j,l=σ(p(˜A:,j)⋅E(u)l−1)
最终的用户和物品嵌入表示如下(每层嵌入的加和):
e(u)i=∑Ll=0z(u)i,l,e(v)j=∑Ll=0z(v)j,l,ˆyi,j=e(u)⊤ie(v)j
2.3 高效的全局协作关系学习
为使图对比学习与全局结构学习一起进行推荐,引入 SVD 以便从全局的角度有效地提取重要的协作信号。
首先对归一化邻接矩阵进行 SVD 分解:
˜A=USV⊤
注意:U 和 V 分别是 I×I 和 J×J 的矩阵,S 是 I×J 的对角矩阵(主对角线为从大到小的奇异值);
由于最大的奇异值通常与矩阵的主成分相关联。因此,本文截断奇异值列表以保持大的奇异值值,并重构被截断的归一化邻接矩阵:
ˆA=UqSqV⊤q
注意:Uq∈RI×q、Vq∈RJ×q、Sq∈Rq×q;
优点:
①:通过识别对用户偏好表示很重要和可靠的 user-item 交互来强调图的主成分;
②:生成的新图结构通过考虑每个 user-item 对来保持全局协作信号;
g(u)i,l=σ(ˆAi,:⋅E(v)l−1),g(v)j,l=σ(ˆA:,j⋅E(u)l−1)
ˆUq,ˆSq,ˆV⊤q=ApproxSVD(˜A,q),ˆASVD=ˆUqˆSqˆV⊤q
G(u)l=σ(ˆASVDE(v)l−1)=σ(ˆUqˆSqˆV⊤qE(v)l−1);G(v)l=σ(ˆA⊤SVDE(u)l−1)=σ(ˆVqˆSqˆU⊤qE(u)l−1)
2.4 简化的局部-全局对比学习
传统方法:采用三视图范式,使用增强图之间的对比策略,而不使用原始图;
本文:认为,增强图之间的对比可能带来错误信息知道,可能是由于破坏了图结构,然而,在本文提出的方法中,增强图视图是通过全局协作关系创建的,这可以增强主视图的表示。
L(u)s=∑Ii=0∑Ll=0−logexp(s(z(u)i,l,g(u)i,l/τ))∑Ii′=0exp(s(z(u)i,l,g(u)i′,l)/τ)
推荐任务损失:
总损失:
L=Lr+λ1⋅(L(u)s+L(v)s)+λ2⋅‖Θ‖22
__EOF__
