-
计算机物联网控制11月9日第五章-重要5.3数控技术基础 *涉及到了真正的控制算法* 5.4PID控制算法
目录
5.3数控技术基础
5.3.-1概述
1.基本概念
数字控制(NC):用数字化信号对机床运动及其加工过程进行控制的一种方法;
数控系统:采用了数控技术的控制系统;
数控设备:采用了数控系统的设备;
计算机数控系统(CNC):以计算机为核心的数控系统。
2.数控系统构成

5.3-2数控原理
1.曲线分段

——将如图所示曲线分割成若干段,可以是直线段,也可以是曲线段,图中分割成了三段即
 、
、 和
和 ;
;——把a、b、c、d四点坐标记下来并送给计算机。图形分割原则应保证险段所连的曲线与原图形误差在允许范围内;
——由图可见,显然采用
 比
比 要精确得多。
要精确得多。2.插值(或插补)
插值(或插补) :当给定a、b、c、d各点坐标x和y值之后,求得各坐标值间的中间值的数值;
直线插补:给定的两个基点之间用一条近似直线来逼近;
二次曲线插补:在给定的两个基点之间用一条近似曲线来逼近。
3.绘图或加工
——把插补运算过程中定出的各中间点,以脉冲信号形式去控制x、y方向上的步进电机,带动绘图笔、刀具等,绘出图形或加工所要求轮廓;
——每一个脉冲信号代表步进电机走一步,即绘图笔或刀具在x或y方向移动一个位置;
——对应于每个脉冲移动的相对位置称为脉冲当量,又称为步长,通常用
 和
和 表示,且一般取
表示,且一般取 。
。
5.3-3数控系统分类
1.按控制方式分类
点位控制数控系统:点位控制最简单,其运动轨迹没有特殊要求,运动时又不加工,它的控制电路只要具有记忆和和比较功能即可,不需要插补运算。
直线控制数系统:和点位控制相比,直线控制要进行直线加工,控制电路要复杂一些。
轮廓数控制系统:要控制刀具准确完成复杂的曲线运动,故控制电路复杂,且需要进行一系列的 插补计算和判断。
2.按系统结构分类
开环数控系统
——早期数控机床采用的数控系统,执行机构多采用步进电机或脉冲马达。数控系统将零件程序处理后,输出指令脉冲信号,驱动步进电动机,控制机床工作台移动。
——这种驱动方式不设置检测元件,指令脉冲送出后,没有反馈信息,容易掌握,调试维修方便,但控制精度和速度受到限制。

全闭环数控系统
——接受数控系统驱动指令同时,还接受工作台上检测元件测出的实际位置反馈信息,比较后根据差值进行修正,消除因传动系统误差引起的误差。
——可获得高的加工精度,由于包含很多机械传动环节,会影响伺服系统的调节参数。因此全闭环系统的设计和调整都有较大困难,处理不好常会造成系统不稳定。主要用于高精度机床。

半闭环数控系统
将测量元件从工作台移到执行机构端,由于工作台不在控制环里,测量元件安装在执行机构端,环路短,刚性好,容易获得稳定的控制特性,广泛应用于各类连续控制的数控机床上。

5.3-4运动控制系统
5.4数字PID控制算法
5.4-1标准数字PID控制算法
proportional(比例)、integral(积分)、differential(微分)三者的缩写,在过程控制中,按误差信号的比例、积分和微分进行控制的调节器,简称PID调节器,是技术成熟、应用最为广泛的一种调节器。
1.标准的PID

 模拟调节器的比例增益;
模拟调节器的比例增益; 积分时间;
积分时间; 微分时间;
微分时间; 为偏差 e=0 时调节器的出,又称为稳态工作点。
为偏差 e=0 时调节器的出,又称为稳态工作点。2.采样周期与控制周期的概念
模拟PID调节规律的离散化
在控制器的采样时刻t=KT时:

因此PID的数字算式如下式:
 数字PID又可写成:(又称PID位置算式)
数字PID又可写成:(又称PID位置算式)

 称为积分系数;
称为积分系数; 称为微分系数。
称为微分系数。PID位置算式的问题:由积分项的存在所产生:

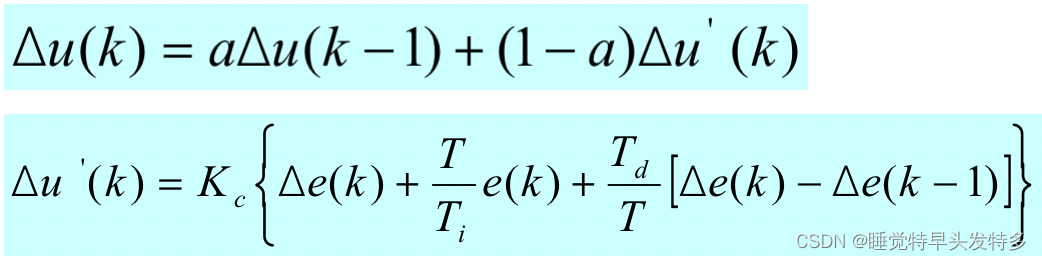
3.PID增量算式

另一种形式:

增量PID算法的优点:
(1)编程简单
(2)数据可以递推使用
(3)占用内存少
(4)速度快
求得K 采样时刻计算机的实际输出控制量为:

5.4-2数字PID控制算法的改进
实际微分PID控制算法
微分的作用
理想微分的PID算法
1.理想微分PID与实际微分PID
——在单位阶跃输入时,它们输出的控制作用:

——其区别在于实际微分多了个一节惯性环节

因为
 为理想PID的输出,
为理想PID的输出, 是一阶惯性环节。
是一阶惯性环节。故:

——经计算,可得实际微分位置型控制算式:

——实际微分增量型控制算式:
实际微分的其它形式:
Gf(s)为一阶超前/一阶滞后环节,或将理想微分作用改为微分/一阶惯性环节。
2.微分先行PID控制算法("测量值微分")
出发点:避免因给定值变化给控制系统带来超调量过大、调节阀动作剧烈的冲击。
特点:只对测量值(被控量)进行微分, 而不对偏差微分, 也即对给定值无微分作用。
偏差计算:
正作用:e(k)=y(k)-r(k)
反作用:e(k)=r(k)-y(k)

微分先行PID控制算法示意图

3.积分分离PID算法
提出背景:积分作用会产生较大超调和振荡
基本思想
当|e(k)|>A时,用P或PD控制;
当|e(k)|<=A时,用PI或PID控制。
注意:
(1)A值要适当选取;
(2)Kc应根据积分作用是否起作用而变化。
积分分离PID算法示意图

4.遇限切除积分PID算法
——执行机构机械性能与物理性能的约束
——积分饱和
——该算法是抑制积分饱和的方法之一
基本思想:一旦计算出的控制量u(k)进入饱和区,一方面对控制量输出值限幅;另一方面增加判别程序,算法中只执行削弱积分饱和项的积分运算,而停止增大积分饱和项的运算。
5.提高积分项积分的精度
积分项的作用:比较重要
提高积分项的运算精度的方法:
初始方法:

改进方法:

模拟调节器实现的微分作用
理想微分作用的实际缺陷
实际微分作用
5.4-3数字PID控制的参数整定
1.整定过程
先按模拟PID控制参数整定方法来选择,然后在适当调整,并考虑采用周期对整定参数的影响
2.采样周期的确定(一般规律)

稳定边界法(临界比例度法)
 动态特性法(响应曲线法)
动态特性法(响应曲线法) 

3.基于偏差积分指标最小的整定参数法
常用三种指标:

最佳整定参数应使这些积分指标最小,不同积分指标所对应的系统输出被控变量响应曲线稍有差别。
一般情况下,ISE指标的超调量大,上升时间快;IAE指标的超调量适中,上升时间稍快;ITAE指标的超调量小,调整时间也短。
4.试凑法
一般规律:
——增大比例系数Kc一般将加快系统的响应,使系统的稳定性变差。
——减小积分时间Ti,将使系统的稳定性变差,使余差(静差)消除加快。
——增大微分时间Td,将使系统的响应加快,但对扰动有敏感的响应,可使系统稳定性变差。
试凑时,可参考上述参数对控制过程的影响趋势,对参数实行先比例,后积分,最后微分的整定步骤。
整定步骤:
(1)首先整定比例部分。将比例系数由小变大,观察相应响应,直到得到反应较快,超调较小的响应曲线。若系统静差较小,满足要求可采用纯比例控制。
(2)如果纯比例控制有较大余差,则需要加入积分作用。积分时间从大变小,同时调整比例增益,使系统保持良好的动态性能,反复调整比例增益和积分时间,以得到满意的动态性能。
(3)若使用比例积分控制,反复调整仍达不到满意的效果,则可加入微分环节。在整定时,微分时间从小变大,相应调整比例增益和积分时间,逐步试凑,以得到满意的动态性能。
常用口诀:
参数整定找最佳,从小到大顺序查
先是比例后积分,最后再把微分加
曲线振荡很频繁,比例度盘要放大
曲线漂浮绕大湾,比例度盘往小扳
曲线偏离回复慢,积分时间往下降
曲线波动周期长,积分时间再加长
曲线振荡频率快,先把微分降下来
动差大来波动慢,微分时间应加长
理想曲线两个波,前高后低4比1
一看二调多分析,调节质量不会低
5.一些图像
比例增益对控制系统过渡过程的影响

积分时间对控制系统过渡过程的影响

微分时间对控制系统过渡过程的影响

纯比例控制参数整定

比例积分控制参数整定

PID控制参数整定1

PID控制参数整定2

6.其他先进的自动整定方法
基于继电反馈控制(relay feed back control)
基于模式识别(pattern recognition)
基于专家系统原理(expert system)
-
相关阅读:
ICP算法加速优化--多线程和GPU
多线程python实现和多线程有序性
35.浅谈贪心算法
小白从CentOS7到安装CDH6.3.2入坑实操指北(一)
Emmet语法
戴尔科技集团通过多云数据保护和安全创新增强网络弹性
python面向对象
React 从入门到实战 一一开发环境基础搭建(小白篇)
Yolov8有效涨点:YOLOv8-AM,添加多种注意力模块提高检测精度,含代码,超详细
将一个(768,1)的张量转换为(1024,)
- 原文地址:https://blog.csdn.net/m0_57656758/article/details/127765385