-
通过PWM实现呼吸灯
前言
- 硬件:stm32f103c8t6 核心板
- 软件:STM32CubeMX 6.4.0
- 软件:keil5 mdk
- 软件:野火串口调试助手
一、PWM是什么?
脉冲宽度调制(PWM)是一种对模拟信号电平进行数字编码的方法。广泛应用于电机控制、灯光的亮度调节、功率控制等领域。
原理:PWM就是对逆变电路开关器件的通断进行控制,使输出端得到一系列幅值相等的脉冲,用这些脉冲来代替正弦波或所需要的波形。也可以这样理解,PWM是一种对模拟信号电平进行数字编码的方法。通过高分辨率计数器的使用,方波的占空比被调制用来对一个具体模拟信号的电平进行编码。PWM信号仍然是数字的,因为在给定的任何时刻,满幅值的直流供电要么完全有(ON),要么完全无(OFF)。电压或电流源是以一种通(ON)或断(OFF)的重复脉冲序列被加到模拟负载上去的。只要带宽足够,任何模拟值都可以使用 PWM 进行编码。
二、配置项目
这里默认你已经创建了一个STMCube项目。新手点这里->:
https://blog.csdn.net/qq_52215423/article/details/127464515-
时钟RCC配置,将HSE选为外部晶振模式
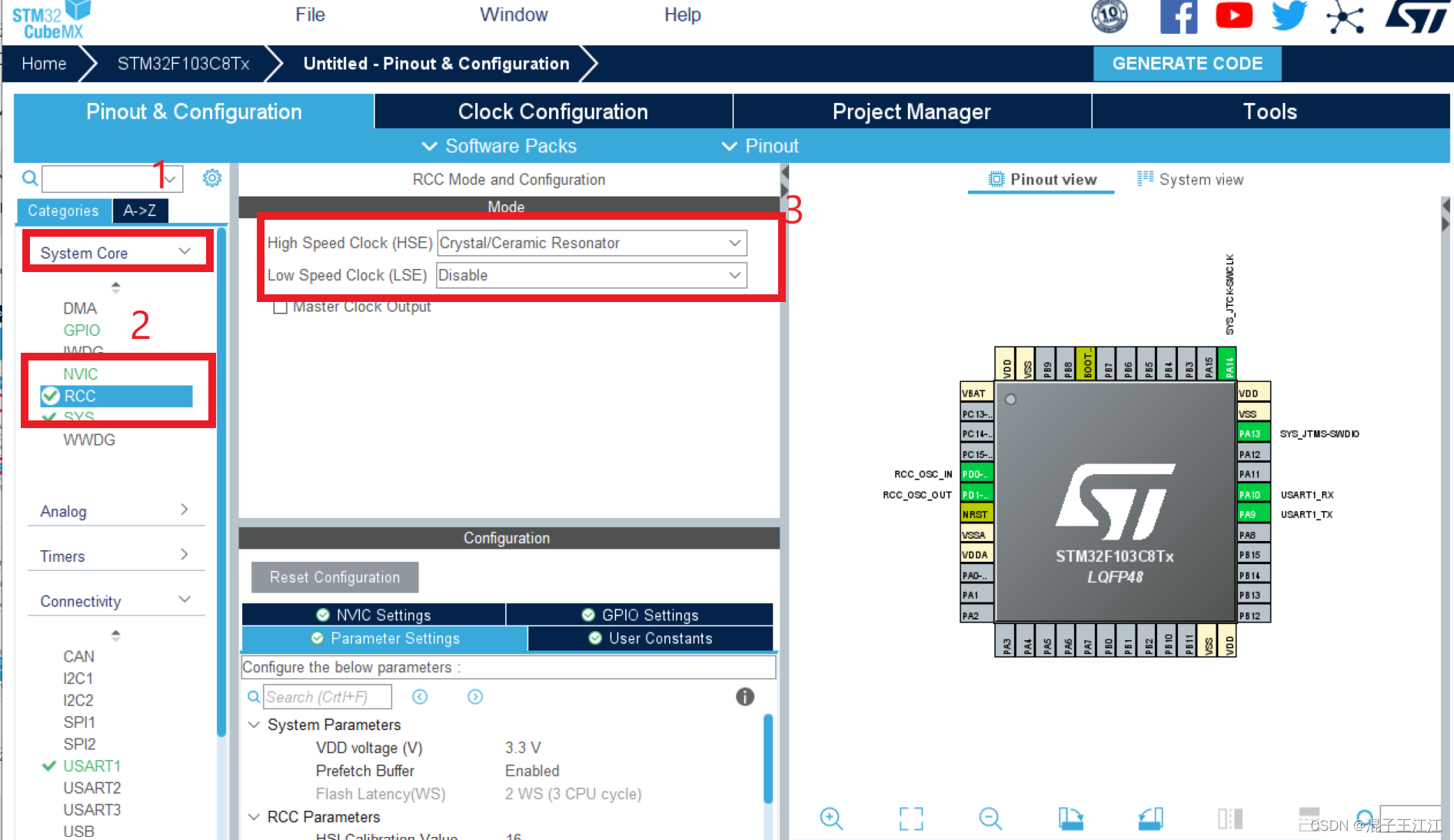
-
SYS设置,选择Serial Wire模式。

-
配置定时器3
勾选Internal Clock(内部时钟)
通道1选择:PWM Generation CH1(PWM输出通道1)
Prtscaler (定时器分频系数) : 71
Counter Mode(计数模式):Up(向上计数模式)
Counter Period(自动重装载值) : 500,其他默认设置占空比初始值为10,其实这里不写也没影响

- 配置定时器4

在设置完定时器三和定时器四之后,右边的芯片图发生改变,那分别是tim3-ch1和time4_ch1对应的管脚。理解这里对后面的接线有帮助。
- 时钟树设置
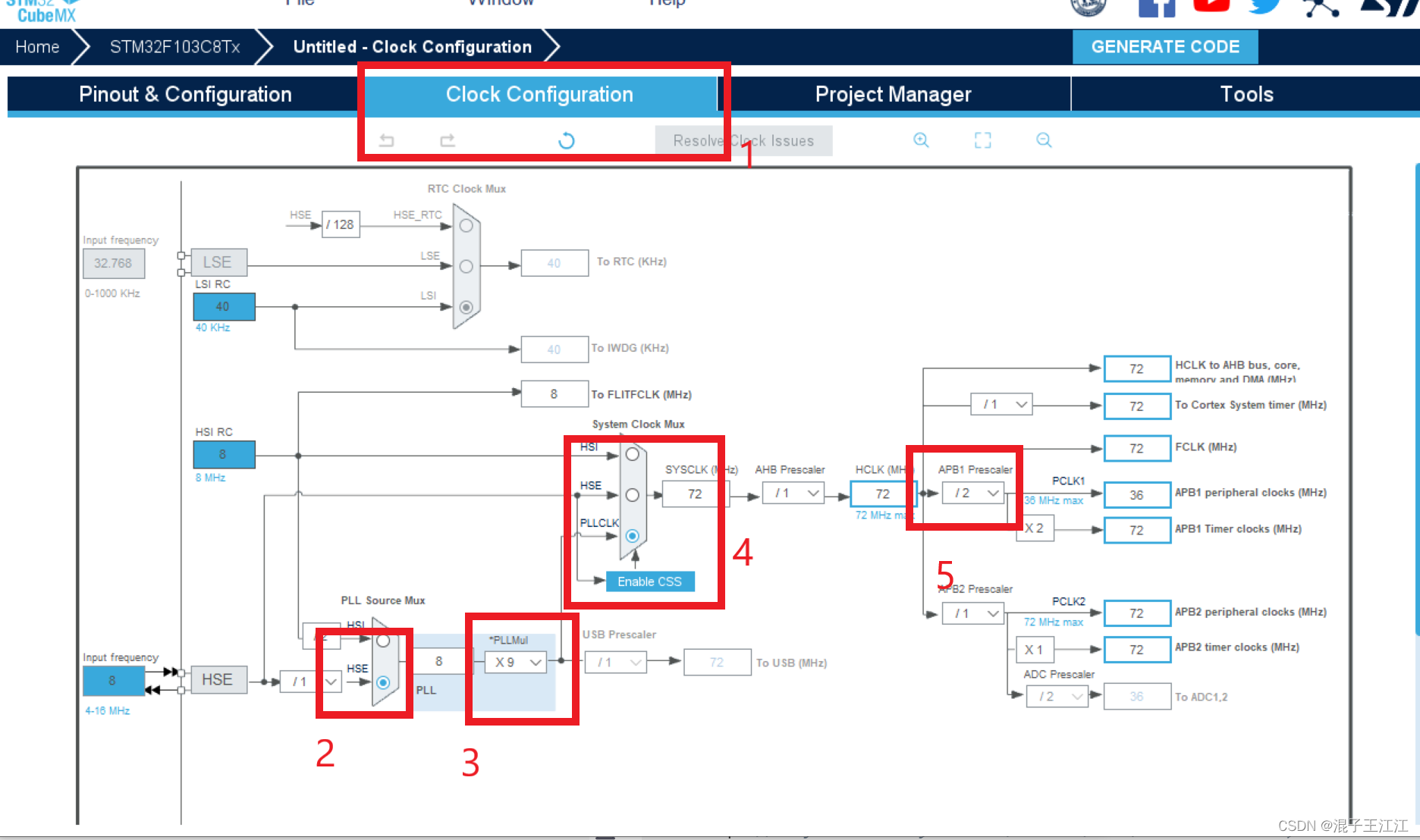
设置工程路径、工程名,最后导出文件。使用keil打开并进行编写。
三、配置代码
- 在main.c文件中定义一个全局变量,初始化为10
uint16_t duty_num = 10;
**- 在main函数里添加下面代码:**用于开启定时器的通道
HAL_TIM_PWM_Start(&htim3,TIM_CHANNEL_1); HAL_TIM_PWM_Start(&htim4,TIM_CHANNEL_1);- 1
- 2
- 3
- 在while循环里添加:
HAL_Delay(50); duty_num = duty_num + 10; if(duty_num > 500) { duty_num = 0; } __HAL_TIM_SetCompare(&htim3, TIM_CHANNEL_1, duty_num); __HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_1, duty_num); HAL_Delay(50);- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
四、效果
QQ视频20221107210905
五、总结
实验来讲相对比较简单,简单了解PWM。还有就是知道了最小开发板上已经焊接的LED灯的输出为PC13管脚。
六、参考资料
http://www.mcublog.cn/stm32/2021_01/stm32cubemx-pwm-huxideng/
-
相关阅读:
1 评价类算法:层次分析法笔记(附Python代码)
面试笔试题之Linux部分58题(第二部分)
unity基础 常用的API及脚本模板
创建型设计模式
MySQL高级SQL语句
Flutter文章汇总
数据结构基本概念-Java常用算法
我的创作纪念日———C/C++之动态内存管理
手写Promise.all/race/any/settled方法
Linux之I2C驱动
- 原文地址:https://blog.csdn.net/qq_52215423/article/details/127738361