-
ROS报错:joint-state-publisher报错
- [WARN] [1664518996.207303]: The 'use_gui' parameter was specified, which is deprecated. We'll attempt to find and run the GUI, but if this fails you should install the 'joint_state_publisher_gui' package instead and run that. This backwards compatibility option will be removed in Noetic.
- [ERROR] [1664518996.208012]: Could not find the GUI, install the 'joint_state_publisher_gui' package
- [joint_state_publisher-2] process has died [pid 45929, exit code 1, cmd /opt/ros/melodic/lib/joint_state_publisher/joint_state_publisher __name:=joint_state_publisher __log:=/home/rosmelodic/.ros/log/5db3fa96-4088-11ed-89d6-000c2969e545/joint_state_publisher-2.log].
- log file: /home/rosmelodic/.ros/log/5db3fa96-4088-11ed-89d6-000c2969e545/joint_state_publisher-2*.log
问题出现原因:
找到想要打开的launch文件,里面用到了一个关节状态的一个发布者。
roslaunch xarm_description xarm7_rviz_display.launch这条命令打开的是一个演示文件,常常用来在moveit配置助手配置完一个机械臂后,进行检查看配置的正确性。
出现关节空间发布者问题,关节空间状态会出错,其中图中标识处会标红。
确定完问题,开始解决。
- "1.0"?>
- <launch>
- <arg name="limited" default="True" doc="If true, limits joint range (-PI, PI) on all joints." />
- <arg name="add_gripper" default="false" doc="If true, will load xarm5 with gripper from UFACTORY attached." />
- <arg name="joint_state_source" default="[/joint_states]" />
- <arg name="joint_state_publisher_gui" default="true" />
- <include file="$(find xarm_description)/launch/xarm7_upload.launch" >
- <arg name="limited" value="$(arg limited)"/>
- <arg name="add_gripper" value="$(arg add_gripper)" />
- include>
- <node name="joint_state_publisher_gui" pkg="joint_state_publisher_gui" type="joint_state_publisher_gui">
- <param name="use_gui" value="$(arg joint_state_publisher_gui)"/>
- <rosparam param="source_list" subst_value="True">$(arg joint_state_source)rosparam>
- node>
- <node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" />
- <arg name="config" default="true" />
- <arg unless="$(arg config)" name="command_args" value="" />
- <arg if="$(arg config)" name="command_args" value="-d $(find xarm_description)/launch/display.rviz" />
- <node name="rviz" pkg="rviz" type="rviz" args="$(arg command_args)" output="screen"/>
- launch>
解决:在这个位置,moveit!自动生成的一般都会出现这个问题,没有_gui,将其填上。
<node name="joint_state_publisher_gui" pkg="joint_state_publisher_gui" type="joint_state_publisher_gui">再次运行,仍会报错。
- ERROR: cannot launch node of type [joint_state_publisher_gui/joint_state_publisher_gui]: joint_state_publisher_gui
- ROS path [0]=/opt/ros/melodic/share/ros
- ROS path [1]=/home/rosmelodic/catkin_ws/src
- ROS path [2]=/opt/ros/melodic/share
出现无法启动这个类型的节点,同时下面给出了ros_melodic根目录的路径。
解决:安装需要的插件。
sudo apt-get install ros-melodic-joint-state-publisher-gui再次运行。
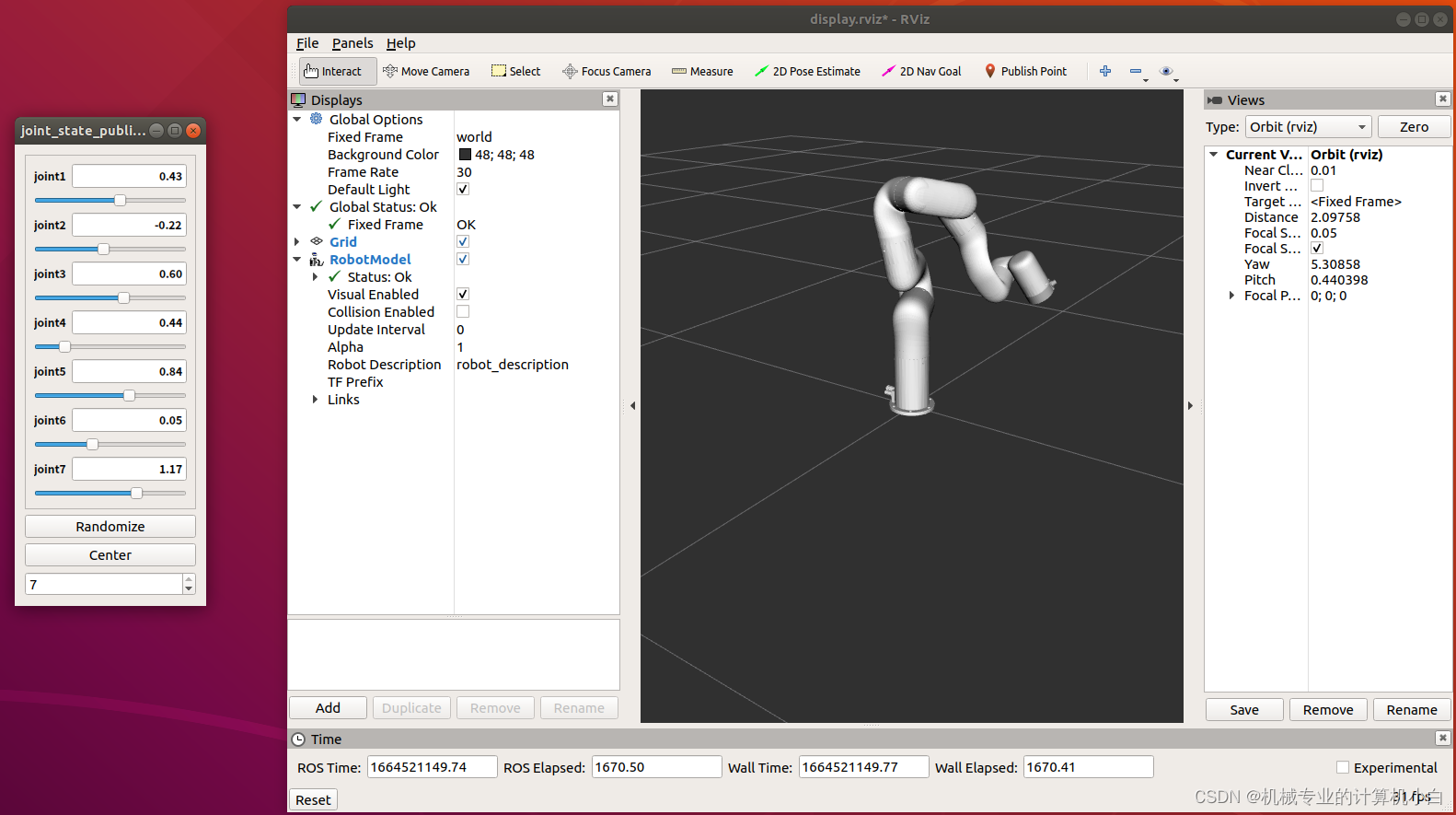
右侧为可以控制关节空间状态的插件,左侧是rviz在展示(display)机械臂,也正是这个launch文件的功能 。
-
相关阅读:
工艺防错指导、可视化工具管理——SunTorque智能扭矩系统
ElasticSearch性能原理拆解
基于天鹰算法优化概率神经网络PNN的分类预测 - 附代码
铁死亡细胞实验相关抑制剂、激动剂
[项目管理-22]:项目中开环、闭环、安全、监控四种沟通模型:UDP/TCP/SCTP/PID模型
列表元素
如何快速为团队打造自己的组件库(下)—— 基于 element-ui 为团队打造自己的组件库
Spring全家桶 源码 入门系列(一) --------容器与 bean
Python---正则表达式
STL常用容器——deque容器的使用
- 原文地址:https://blog.csdn.net/wzfafabga/article/details/127123248