-
PIE-engine 教程 ——随机森林监督分类案例(河北安国市为例)
本次举一个简答的案例,通过对一个县级市进行监督分类采样,然后进行耕地、林地、园地和其它的划分,除此之外,我们还需要掌握随机样本点的采集,混淆矩阵以及精度计算等问题。首先我们看一下随机样本点的选取函数:
sampleRegions(collection,properties,scale,projection,tileScale,geometries)
从Image中随机采样,返回结果是一个FeatureCollection,FeatureCollection下的每一个Feature中存储采样点的相应波段的信息
方法参数:
- image(Image)
Image实例。
- collection(FeatureCollection)
样本点,需要包括分类字段
- properties(List)
采样保留字段集合
- scale(Float)
图像采样比例尺
- projection(String)
未启用
- tileScale(Float)
未启用
- geometries(Boolean)
未启用
返回值:Image
pie.Classifier.rTrees(options)
随机森林分类方法分类器
方法参数:
- Classifier(Classifier)
监督分类分类器实例
- options(Object)
参数对象
返回值:Classifier
随机森林的悬链样本
train(features,classProperty,inputProperties,subsampling,subsamplingSeed)
监督分类分类器训练
方法参数:
- Classifier(Classifier)
监督分类分类器实例
- features(FeatureCollection)
样本点
- classProperty(String)
分类类别字段
- inputProperties(List)
分类计算字段
- subsampling(Float)
未启用
- subsamplingSeed(nt)
未启用
返回值:Classifier
分类后影像进行平滑去噪处理,这里默认用到的半径为3
focal_min(radius,kernelType,iterations,units,kernel)
形态学腐蚀算法。
方法参数:
- image(Image)
Image实例。
- radius(Number)
半径,默认3。
- kernelType(String)
计算核的类型,默认circle。
- iterations(Number)
计算循环的次数,默认为1
- units(String)
计算采用的单位,默认为pixel
- kernel(Kernel)
计算采用的核。
返回值:Image
focal_max(radius,kernelType,iterations,units,kernel)
形态学膨胀算法。
方法参数:
- image(Image)
Image实例。
- radius(Number)
半径,默认3。
- kernelType(String)
计算核的类型,默认circle。
- iterations(Number)
计算循环的次数,默认为1
- units(String)
计算采用的单位,默认为pixel
- kernel(Kernel)
计算采用的核。
返回值:Image
confusionMatrix()
计算监督分类分类器结果的混淆矩阵
方法参数:
- Classifier(Classifier)
监督分类分类器实例
返回值:ConfusionMatrix
classify(classifier,outputName)
按照之前设定的监督分类器,进行分类,并给出名称
进行监督分类,返回结果为分类后的影像
方法参数:
- image(Image)
Image实例。
- classifier(Classifier)
监督分类分类器
- outputName(String)
分类影像的波段名称,“classfiy”为默认值
返回值:Image
errorMatrix(actual,predicted,order)
通过比较FeatureCollection的两列(一列包含实际值,另一列包含预测值),计算FeatureCollection的二维错误矩阵,其中数值从0开始。矩阵的轴0(行)对应于实际值,轴1(列)对应于预测值。
方法参数:
- featureCollection(FeatureCollection)
FeatureCollection实例
- actual(String)
包含实际值的属性的名称。
- predicted(String)
包含预测值的属性的名称。
- order(List)
未启用
返回值:ConfusionMatrix
acc()
混合矩阵的精确度计算结果
方法参数:
- ConfusionMatrix(Object)
混合矩阵对象
返回值:Number
kappa()
返回混合矩阵的kappa系数
方法参数:
- ConfusionMatrix(Object)
混合矩阵对象
代码:
- /**
- * @File : 安国市耕林园地随机森林监督分类
- * @Time : 2022/3/1
- * @Author : piesat
- * @Version : 1.0
- * @Contact : 400-890-0662
- * @License : (C)Copyright 航天宏图信息技术股份有限公司
- * @Desc : 安国市耕林园地随机森林监督分类
- */
- var imageCollection0 = pie.ImageCollection("GF2/L1A/Fusion");
- var featureCollection0 = pie.FeatureCollection("NGCC/CHINA_COUNTY_BOUNDARY");
- var imageCollection0 = pie.ImageCollection("NGCC/GLOBELAND30");
- // 耕、林、园地分类
- // 1.加载研究区-安国市行政边界
- var anguo = pie
- .FeatureCollection("NGCC/CHINA_COUNTY_BOUNDARY")
- .filter(pie.Filter.eq("name", "安国市"))
- .first()
- .geometry();
- Map.centerObject(anguo, 10);
- Map.addLayer(anguo, { color: "red", fillColor: "00000000", width: 2 }, "anguo");
- // 2.加载栅格影像
- // 数据说明:image为保存于云端、计算好的sentinel合成的NDVI多时序波段数据.
- //images_Anguo_City数据中B1、B2、B3为Sentinel的三个波段,B4-B11计算好的sentinel合成的NDVI多时序波段数据
- var bands = ["B4", "B5", "B6", "B7", "B8", "B9", "B10", "B11"];
- var image = pie
- .Image("user/pieadmin/public/Raster/images_Anguo_City")
- .select(bands)
- .multiply(10000);
- print("img", image);
- // 加载显示一个波段2020.7.6_NDVI
- var image0 = pie.Image("user/pieadmin/public/Raster/images_Anguo_City");
- Map.addLayer(image0.select("B4"), { min: -1, max: 1 }, "2020.7.6_NDVI", false);
- // Sentinel2数据显示
- var image_vis = pie
- .Image("user/pieadmin/public/Raster/images_Anguo_City")
- .select(["B1", "B2", "B3"]);
- var visParam = { min: 0, max: 3000, bands: ["B1", "B2", "B3"] };
- Map.addLayer(
- image_vis.select(["B1", "B2", "B3"]),
- visParam,
- "Sentinel2_image",
- false
- );
- // 3.point为样本点,0为耕地,1为林地,2为园地,3为其他地物.
- var point = pie.FeatureCollection(
- "user/pieadmin/public/shape/Training_Points_Anguo_City"
- );
- Map.addLayer(point, { color: "Red" }, "points");
- // print(point)
- // 获取训练样本
- var training = image.sampleRegions(point, ["landcover"], 10, "", "", true);
- // Map.addLayer(training, {color: "FAFAD2"}, "trainingpoints");
- var withRandom = pie.FeatureCollection("user/HaorenWang/withRandom");
- var trainPartition = withRandom.filter(pie.Filter.lte("random", 0.7));
- var testPartition = withRandom.filter(pie.Filter.gt("random", 0.7));
- Map.addLayer(trainPartition, { color: "red" }, "training");
- Map.addLayer(testPartition, { color: "blue" }, "validation");
- print("withRandom", withRandom);
- print("training", trainPartition);
- print("validation", testPartition);
- // 4.构建分类器,利用70%数据进行训练.30%数据进行测试
- // 构建随机森林Random Forest
- var classifer = pie.Classifier.rTrees().train(
- trainPartition,
- "landcover",
- bands
- );
- // 5.进行分类
- var class_image1 = image.classify(classifer);
- // 分类后处理:平滑影像,进行开闭运算剔除噪声影响.
- var class_image2 = class_image1.focal_min(2).focal_max(2);
- // var kernel= pie.Kernel().mean(3)
- // class_image2 = class_image1.convolve(kernel)
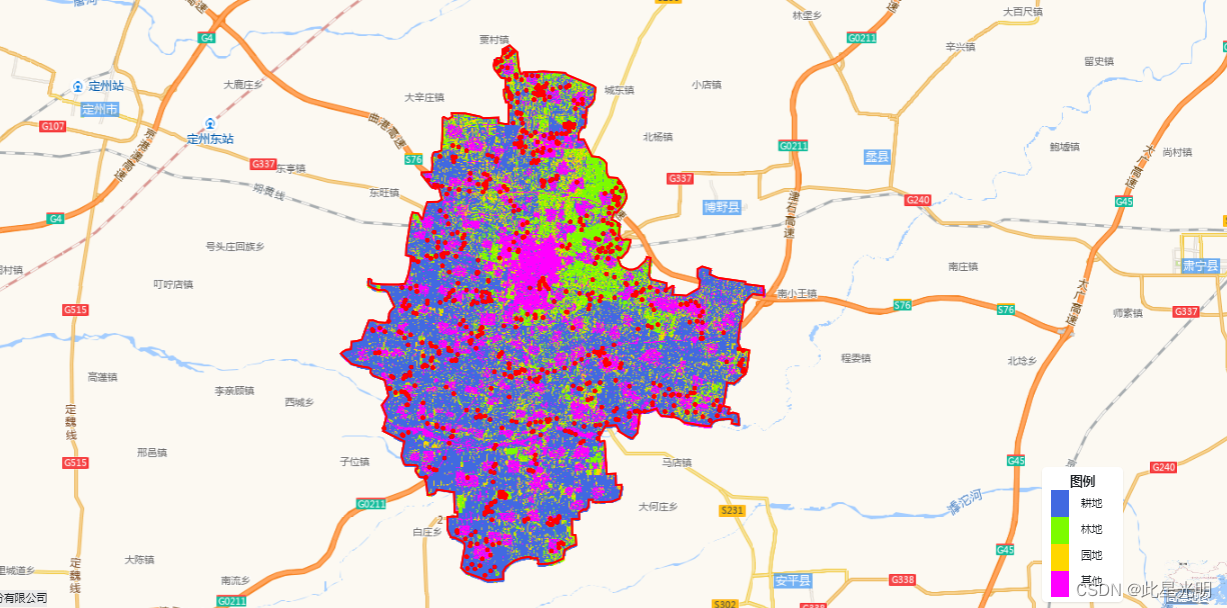
- // 分类结果显示. 蓝色为耕地,绿色为林地,黄色为园地,紫色为其他.
- var visParam = {
- opacity: 1,
- uniqueValue: "0,1,2,3",
- palette: "#4169E1,#7CFC00,#FFD700,#FF00FF",
- };
- //加载分类结果
- Map.addLayer(class_image1, visParam, "class_image1");
- //加载分类后处理结果
- Map.addLayer(class_image2, visParam, "class_image2");
- //6.精度验证
- var matrix = classifer.confusionMatrix();
- print("matrix", matrix);
- // 评估训练样本的精度.
- var checkM = classifer.confusionMatrix();
- print("训练矩阵-ACC系数:", checkM.acc());
- print("训练矩阵-Kappa系数:", checkM.kappa());
- // 评估验证样本的精度.
- var predictResult = testPartition.classify(classifer, "classification");
- var errorM = predictResult.errorMatrix("landcover", "classification");
- print("验证矩阵-ACC系数:", errorM.acc());
- print("验证矩阵-Kappa系数:", errorM.kappa());
- // 7.添加图例
- var data = {
- title: "图例",
- colors: ["#4169E1", "#7CFC00", "#FFD700", "#FF00FF"],
- labels: ["耕地", "林地", "园地", "其他"],
- step: 1, // 将每个单位色块均分为30个
- isvertical: true,
- };
- var style = {
- right: "140px", // 图例框的右侧与屏幕最右端的距离
- bottom: "10px", // 图例框的底侧与屏幕底端的距离
- height: "150px", // 图例框的纵向高度
- width: "90px", // 图例框的横向长度
- };
- var legend = ui.Legend(data, style);
- Map.addUI(legend);
- //导出影像
- Export.image({
- image: class_image2,
- description: "Classified_Image_by_filter",
- region: anguo,
- scale: 10,
- });
返回值:Number
训练精度结果:

这里大家需要注意的是,因为在这里并没有进行影像的计算,而是直接从云端调用已经裁剪和设定好的影像,所以这里并不能更换研究区,如果想要进行研究区的更换,需要自己重写sentinel影像以及NDVI的计算。
-
相关阅读:
数据容器分类总结
云计算安全的新挑战:零信任架构的应用
[Linux] Linux下多Tomcat部署
力扣(LeetCode)6. Z 字形变换(C++)
[LeetCode][54]【学习日记】螺旋遍历二维数组
传奇脚本中提到的WIL序号是什么?在哪查看WIL序号?
java-php-net-python-基于的相册软件的设计与实现计算机毕业设计程序
开源WebRTC库放大器模式在采集桌面图像时遇到的DPI缩放与内存泄漏问题排查
WindowsServer域控的安装与卸载
Vue 的h()
- 原文地址:https://blog.csdn.net/qq_31988139/article/details/127007651