-
e2studio瑞萨笔记——ADC单次扫描多渠道
一.搭建工程
二.配置
1.时钟设置

2.uart配置
点击Stacks->New Stack->Connectivity->UART on r_sci_uart

(1)uart配置属性

Name g_uart9 名字
Channnel 9 通道
Data Bits 8bits 数据位
Parity None 无校验
Baud Rate 115200 波特率
Callback user_uart_callback 回调函数
TXD9 P109 串口发送端口
RXD9 P110 串口接收端口
(2)回调函数 user_uart_callback()
发送完毕可以用UART_EVENT_TX_COMPLETE进行判断
- volatile bool uart_send_complete_flag = false;
- void user_uart_callback (uart_callback_args_t * p_args)
- {
- if(p_args->event == UART_EVENT_TX_COMPLETE)
- {
- uart_send_complete_flag = true;
- }
- }
(3)设置e2studio堆栈
(4)e2studio的重定向printf()设置

C++ 构建->设置->GNU ARM Cross C Linker->Miscellaneous去掉Other linker flags中的 “–specs=rdimon.specs”
勾选了Use float with nano printf(-u _printf_float),才能使用浮点
(5)printf输出重定向到串口
- #ifdef __GNUC__ //串口重定向
- #define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
- #else
- #define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
- #endif
- PUTCHAR_PROTOTYPE
- {
- err = R_SCI_UART_Write(&g_uart9_ctrl, (uint8_t *)&ch, 1);
- if(FSP_SUCCESS != err) __BKPT();
- while(uart_send_complete_flag == false){}
- uart_send_complete_flag = false;
- return ch;
- }
- int _write(int fd,char *pBuffer,int size)
- {
- for(int i=0;i{__io_putchar(*pBuffer++);}return size;}
3.ADC配置
点击Stacks->New Stack->Driver->Analog -> ADC Driver on r_adc。

(1)ADC属性配置

Name g_adc0 ADC名称
Resolution 12-Bit 精度
Alignment Right 对齐方式
Mode Single Scan 单次扫描
Channel 选择模拟信号接入的通道
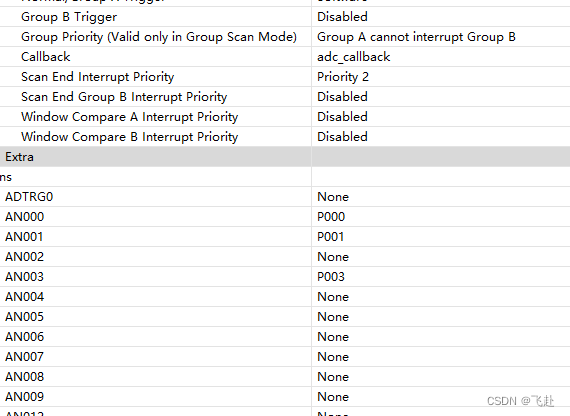
Callback adc_callback 回调函数,ADC每次转换完之后都会进入
Scan End interrupt Priority Priority 2 ADC优先级
AN000 P000 ADC所选通道
R_ADC_Open()函数原型
- R_ADC_Open()
- fsp_err_t R_ADC_Open(
- adc_ctrl_t * p_ctrl,
- adc_cfg_t const*const p_cfg
- )
- 为整个外设设置操作模式,触发源,中断优先级和配置。如果启用了中断,该函数将注册一个回调函数指针,以便在扫描完成时,通知用户。
- return value:
- FSP_SUCCESS 模块已准备好可以使用
- FSP_ERR_ASSERTION 输入参数无效
- FSP_ERR_ALREADY_OPEN 实例控制结构体已经打开
- FSP_ERR_IRQ_BSP_DISABLED 提供了回调,但是中断却没有使能
- FSP_ERR_IP_CHANNEL_NOT_PRESENT 所请求的单元在MCU上不存在
- FSP_ERR_INVALID_HW_CONDITION ADC时钟至少为1 MHZ
故可以用R_ADC_Open()函数进行配置,开启和初始化ADC模式
- /* Initializes the module. */
- err = R_ADC_Open(&g_adc0_ctrl, &g_adc0_cfg);
- /* Handle any errors. This function should be defined by the user. */
- assert(FSP_SUCCESS == err);
R_ADC_ScanCfg()函数原型
- R_ADC_ScanCfg()
- fsp_err_t R_ADC_ScanCfg(
- adc_ctrl* p_ctrl,
- void const *const p_channel_cfg
- )
- 配置ADC扫描参数,通道特定设置是在这个函数中设置的,通过指针将adc_channel_cfg_t传递给p_channel_cfg.
- note
- 如果adc_channel_cfg_t::priority_group_a设置为ADC_GROUP_A_GROUP_B_CONTINUOUS_SCAN,则启动B组扫描
- return value
- FSP_SUCCESS 成功
- FSP_ERR_ASSERTION 输入的参数无效
- FSP_ERR_NOT_OPEN 单元没有打开
配置ADC扫描参数,赋能ADC通道。在此函数中设置通道特定设置。
R_ADC_ScanStart()函数原型
- R_ADC_ScanStart()
- fsp_err_t R_ADC_ScanStart(adc_ctrl_t * p_ctrl)
- 启动软件扫描或启动扫描的硬件触发器,这取决于触发器在R_ADC_Open调用中的配置方法。如果该单元被配置为ELC或外部硬件触发,那么该功能允许触发信号到达ADC单元,该函数不能控制触发器本身的生成,如果该单元被配置为软件触发,则该功能启动软件触发扫描先决条件。
- 先决条件:
- 在开始扫描之前,在R_ADC_Open之后调用R_ADC_Scancfg
- 在支持校准的mcu上,调用R_ADC_Calibrate并等待校准完成后再开始扫描
- 返回值:
- FSP_SUCCESS 扫描已启动(软件触发)或启动硬件触发
- FSP_ERR_ASSERTION 输入参数无效
- FSP_ERR_NOT_OPEN 单元未打开
- FSP_ERR_IN_USE 另一个扫描仍在进行中(软件触发)
启动扫描,若设置为单次扫描,没扫描完一次都需要重新开启。
- /* Enable scan triggering from ELC events. */
- (void) R_ADC_ScanStart(&g_adc0_ctrl);
回调函数adc_callback ()
每次扫描完之后都会进入回调函数中。
- volatile bool scan_complete_flag = false;
- void adc_callback (adc_callback_args_t * p_args)
- {
- //宏将告知编译器回调函数不使用参数 p_args,从而避免编译器发出警告,
- FSP_PARAMETER_NOT_USED(p_args);
- scan_complete_flag = true;
- }
故需要在扫描时候在主程序中等待其扫描完毕。
- scan_complete_flag = false;
- while (!scan_complete_flag)
- {
- /* Wait for callback to set flag. */
- }
R_ADC_Read()函数原型
- R_ADC_Read()
- fsp_err_t R_ADC_Read(
- adc_ctrl_t* p_ctrl,
- adc_channel const reg_id,
- uint16_t *const p_data
- )
- 从单个通道或传感器读取转换结果
- FSP_SUCCESS 读取提供的p_data的数据
- FSP_ERR_ASSERTION 输入参数无效
- FSP_ERR_NOT_OPEN 单元未打开
- err =R_ADC_Read(&g_adc0_ctrl, ADC_CHANNEL_0, &adc_data1);
- assert(FSP_SUCCESS == err);
- a1=(double)(adc_data1/4095.0)*3.3;
4.多通道设置
通道配置要注意通道数,配置错误可能会读取错误。
实例:
- #include "hal_data.h"
- #include
- FSP_CPP_HEADER
- void R_BSP_WarmStart(bsp_warm_start_event_t event);
- void adc_callback(adc_callback_args_t *p_args);
- int __io_putchar(int ch);
- FSP_CPP_FOOTER
- fsp_err_t err = FSP_SUCCESS;
- unsigned char send_buff[100];
- volatile bool uart_send_complete_flag = false;
- /* Callback function */
- void user_uart_callback(uart_callback_args_t *p_args)
- {
- /* TODO: add your own code here */
- if(p_args->event == UART_EVENT_TX_COMPLETE)
- {
- uart_send_complete_flag = true;
- }
- }
- #ifdef __GNUC__ //串口重定向
- #define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
- #else
- #define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
- #endif
- PUTCHAR_PROTOTYPE
- {
- err = R_SCI_UART_Write(&g_uart9_ctrl, (uint8_t *)&ch, 1);
- if(FSP_SUCCESS != err) __BKPT();
- while(uart_send_complete_flag == false){}
- uart_send_complete_flag = false;
- return ch;
- }
- int _write(int fd,char *pBuffer,int size)
- {
- for(int i=0;i{__io_putchar(*pBuffer++);}return size;}volatile bool scan_complete_flag = false;/* Callback function */void adc_callback(adc_callback_args_t *p_args){/* TODO: add your own code here *///宏将告知编译器回调函数不使用参数 p_args,从而避免编译器发出警告,FSP_PARAMETER_NOT_USED(p_args);scan_complete_flag = true;}void hal_entry(void){/* TODO: add your own code here */err = R_SCI_UART_Open(&g_uart9_ctrl, &g_uart9_cfg);assert(FSP_SUCCESS == err);err = R_ADC_Open(&g_adc0_ctrl, &g_adc0_cfg);assert(FSP_SUCCESS == err);err = R_ADC_ScanCfg(&g_adc0_ctrl, &g_adc0_channel_cfg);assert(FSP_SUCCESS == err);printf("hello\n");uint16_t adc_data0=0;uint16_t adc_data1=0;uint16_t adc_data3=0;double a0,a1,a3;while(1){/* Enable scan triggering from ELC events. */(void) R_ADC_ScanStart(&g_adc0_ctrl);scan_complete_flag = false;while (!scan_complete_flag){/* Wait for callback to set flag. */}err = R_ADC_Read(&g_adc0_ctrl, ADC_CHANNEL_0, &adc_data0);assert(FSP_SUCCESS == err);a0=(double)(adc_data0/4095.0)*3.3;err = R_ADC_Read(&g_adc0_ctrl, ADC_CHANNEL_1, &adc_data1);assert(FSP_SUCCESS == err);a1=(double)(adc_data1/4095.0)*3.3;err = R_ADC_Read(&g_adc0_ctrl, ADC_CHANNEL_3, &adc_data3);assert(FSP_SUCCESS == err);a3=(double)(adc_data3/4095.0)*3.3;printf("%d,a0=%f\n",adc_data0,a0);printf("%d,a1=%f\n",adc_data1,a1);printf("%d,a3=%f\n",adc_data3,a3);R_BSP_SoftwareDelay (1000, BSP_DELAY_UNITS_MILLISECONDS);}#if BSP_TZ_SECURE_BUILD/* Enter non-secure code */R_BSP_NonSecureEnter();#endif}
-
相关阅读:
【每日一题Day46】LC1796字符串中第二大的数字 | 模拟
作业比赛编号 : 1276 - 2022年春季学期《算法分析与设计》练习14
Springboot 国际化
现代 CSS 指南 -- at-rule 规则扫盲
第七周笔记
使用Inno Setup 制作软件安装包详细教程(与开发语言无关)
Redis的四种模式:单机、主从、哨兵、集群
【周阳-JUC入门】【02】Callable_ForkJoin_异步回调
心里明白,面上糊涂
硬盘数据丢失怎么办?电脑硬盘恢复,3个步骤
- 原文地址:https://blog.csdn.net/fuyuyf/article/details/127085711