1. 概述
在进行二维空间几何运算的之前,往往会用包围盒进行快速碰撞检测,从而筛掉一些无法碰撞到的可能。而在三维中,比较常用的就是包围球了。当然,如何计算包围球是一个问题。
2. 详论
2.1. naive算法
一个最简单的思路就是,计算空间顶点在X、Y、Z方向上的最大值和最小值,那么就可以得到8个顶点组成的包围盒。取包围球中心为包围盒中心点,而包围球半径有的人认为可以取中心点到八个顶点的最大距离——这样其实并不严密。最好还是计算中心点到所有顶点距离的最大值:
void BoundingSphere::GetBoundingSphereNative(const std::vector& pointList)
{
if (pointList.empty())
{
return;
}
Vec3d minPoint(DBL_MAX, DBL_MAX, DBL_MAX);
Vec3d maxPoint(-DBL_MAX, -DBL_MAX, -DBL_MAX);
size_t vertexCount = pointList.size();
for (size_t vi = 0; vi < vertexCount; vi++)
{
if (minPoint.x() > pointList[vi].x())
{
minPoint.x() = pointList[vi].x();
}
if (minPoint.y() > pointList[vi].y())
{
minPoint.y() = pointList[vi].y();
}
if (minPoint.z() > pointList[vi].z())
{
minPoint.z() = pointList[vi].z();
}
if (maxPoint.x() < pointList[vi].x())
{
maxPoint.x() = pointList[vi].x();
}
if (maxPoint.y() < pointList[vi].y())
{
maxPoint.y() = pointList[vi].y();
}
if (maxPoint.z() < pointList[vi].z())
{
maxPoint.z() = pointList[vi].z();
}
}
Vec3d naiveCenter = (maxPoint + minPoint) / 2;
double naiveRadius = 0;
for (size_t vi = 0; vi < vertexCount; vi++)
{
naiveRadius = std::max(naiveRadius, (pointList[vi] - naiveCenter).length());
}
data = { naiveCenter.x(), naiveCenter.y(), naiveCenter.z(), naiveRadius };
}
这个算法的思路比较简单,所以称之为naive算法。
2.2. ritter算法
另外一种算法是一个名为ritter提出来的,所以称为ritter算法。
首先计算出X方向上距离最远的两个点,Y方向上距离最远的两个点以及Z方向上距离最远的两个点。以这三个距离最远的范围作为初始直径,这三个距离的中心点作为初始球心。
然后依次遍历所有点,判断点是否在这个包围球内。如果不在,则更新包围球。如下图所示:
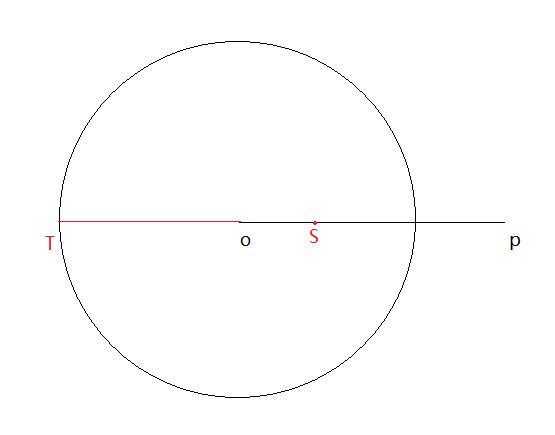
如果点P在我们的之前得到的包围球之外,那么延长点P与球心O的直线与球相较于T点,很显然,新的直径应该是点T与点P的一半:
令点T与点P的中心点为S,也就是新的球心位置。关键就是求向量\(\overrightarrow{OS}\),从而将球心O移动到新的球心S。
显然,向量\(\overrightarrow{OS}\)的距离还是很好求的,只新的包围球半径与之前包围球的半径之差:
而向量\(\overrightarrow{OP}\)是已知的,根据向量关系,可求得:
最后将之前的球心O移动向量\(\overrightarrow{OS}\),就是新的包围球的球心位置了。
具体的算法代码实现:
void BoundingSphere::GetBoundingSphereRitter(const std::vector& pointList)
{
//
Vec3d minPoint(DBL_MAX, DBL_MAX, DBL_MAX);
Vec3d maxPoint(-DBL_MAX, -DBL_MAX, -DBL_MAX);
size_t minX = 0, minY = 0, minZ = 0;
size_t maxX = 0, maxY = 0, maxZ = 0;
size_t vertexCount = pointList.size();
for (size_t vi = 0; vi < vertexCount; vi++)
{
if (minPoint.x() > pointList[vi].x())
{
minPoint.x() = pointList[vi].x();
minX = vi;
}
if (minPoint.y() > pointList[vi].y())
{
minPoint.y() = pointList[vi].y();
minY = vi;
}
if (minPoint.z() > pointList[vi].z())
{
minPoint.z() = pointList[vi].z();
minZ = vi;
}
if (maxPoint.x() < pointList[vi].x())
{
maxPoint.x() = pointList[vi].x();
maxX = vi;
}
if (maxPoint.y() < pointList[vi].y())
{
maxPoint.y() = pointList[vi].y();
maxY = vi;
}
if (maxPoint.z() < pointList[vi].z())
{
maxPoint.z() = pointList[vi].z();
maxZ = vi;
}
}
//
double maxLength2 = (pointList[maxX] - pointList[minX]).length2();
Vec3d min = pointList[minX];
Vec3d max = pointList[maxX];
{
double yMaxLength2 = (pointList[maxY] - pointList[minY]).length2();
if (maxLength2 < yMaxLength2)
{
maxLength2 = yMaxLength2;
min = pointList[minY];
max = pointList[maxY];
}
double zMaxLength2 = (pointList[maxZ] - pointList[minZ]).length2();
if (maxLength2 < zMaxLength2)
{
maxLength2 = zMaxLength2;
min = pointList[minZ];
max = pointList[maxZ];
}
}
//
Vec3d ritterCenter = (min + max) / 2;
double ritterRadius = sqrt(maxLength2) / 2;
for (size_t i = 0; i < vertexCount; i++)
{
Vec3d d = pointList[i] - ritterCenter;
double dist2 = d.length2();
if (dist2 > ritterRadius * ritterRadius)
{
double dist = sqrt(dist2);
double newRadious = (dist + ritterRadius) * 0.5;
double k = (newRadious - ritterRadius) / dist;
ritterRadius = newRadious;
Vec3d temp = d * k;
ritterCenter = ritterCenter + temp;
}
}
data = { ritterCenter.x(), ritterCenter.y(), ritterCenter.z(), ritterRadius };
}
2.3. 其他
理论上来说,ritter算法的实现要优于naive算法,能够得到更加贴合的包围球。当然理论只是理论,具体的实现还要看最终的效果。根据文献2中所说,经过Cesium的比对测试,19%的情况下,ritter算法的效果比naive算法差;11%的情况下,ritter算法的效果会比naive算法好。所以在Cesium中,包围球的实现是把两者都实现了一遍,然后取半径较小的结果。