-
矩阵低秩与图像去噪去码等应用
0、前言
在读论文时,通道会提到一个“低秩”的概念,于是在粗略研究后记下该篇。
1、矩阵与秩
我们在线性代数中学习过矩阵的秩,说白了就是非相关性,比如有方程组:
{ 2 x + 3 y = 13 3 x + 4 y = 18 6 x + 8 y = 36⎩ ⎨ ⎧2x+3y=133x+4y=186x+8y=36{ 2 x + 3 y = 13 3 x + 4 y = 18 6 x + 8 y = 36
我们解方程组的时候就发现,通过方程1和2就能解出来,并且方程3和方程2就是一回事,通过方程2就能表示方程3, 所以方程2和3存在相关性,而真正能描述这个方程组的就只有方程1和2。如果用线性代数的矩阵来解方程,将系数写成矩阵,那么矩阵的秩就是2:
∣ 2 3 13 3 4 18 6 8 36 ∣∣ ∣236348131836∣ ∣| 2 3 13 3 4 18 6 8 36 | 如此看来,矩阵的秩就是指非相关性,我们已知上面这个矩阵的秩=2,代表真正有用的只有两个,那也意味着,这个矩阵能够投影到更低维的线性子空间,用两个向量就能完全表达了:
∣ 2 3 13 3 4 18 ∣∣ ∣23341318∣ ∣| 2 3 13 3 4 18 | 推广之,如果矩阵之间各行的相关性很强,那么就表示这个矩阵实际可以投影到更低维的线性子空间,也就是用几个向量就可以完全表达了,它就是低秩的。
2、低秩矩阵
低秩是指矩阵的秩比较小,而矩阵的低秩性是指矩阵的秩相对矩阵的行数或列数而言很小。
(也就是矩阵B是低秩的是说B的秩比B的行或列数要小,而不是说B的秩比A的秩要小)低秩与稀疏。低秩是指矩阵的秩较小,稀疏是指矩阵中非零元素的个数少。如果对矩阵进行奇异值分解,并把其所有奇异值排列为一个向量,那么这个向量的稀疏性便对应于该矩阵的低秩性
3、低秩与图像
在生活中很多东西都是相关的有联系的,所以实际中低秩是更常见的。比如若将图像看成一个矩阵,那么它的基的数量越少,基对应的线性无关向量数量就越少,矩阵的秩就越小。当它远远小于矩阵的大小的时候,图像就是低秩的。利用这种冗余信息可以对确实图像信息进行恢复,可以将多出来的噪声信息进行去除,还可以对错误的图像信息进行恢复。
图像处理中,rank(秩)可以理解为图像所包含的信息的丰富程度,在现实生活中,一张图片大部分是相似的。比如一张大草原的图片可以理解为,草原是由很多草组成的,而草是相似的,所以如果全是草,那么这张图所包含的信息量是很少的的,因为可以理解为草是草的复制品。而图中的蒙古包,人,马之类的则可以理解为图片所包含的信息,实际上,相对于只有草的草原图片和有草和蒙古包的草原图片,后者的秩是较高的。也就是说,图片中比较突兀的成分,比如蒙古包,比如人像照片中的红眼亮点,会增加图像矩阵的秩。而现实生活中一张不错的图片的秩其实是比较低的,如果图像的秩比较高,往往是因为图像中的噪声比较严重。比如拍照的时候ISO感光度设置过高造成噪点太过泛滥之类的。所以,图像处理的低秩性其实可以拿来去除照片中的噪点,电影中的雨丝也可以通过低秩表达的方式来去除。
这里可以这样理解,如1节中的秩=2的矩阵:
∣ 2 3 13 3 4 18 6 8 36 ∣∣ ∣236348131836∣ ∣| 2 3 13 3 4 18 6 8 36 |
将其理解一张清晰的图片,那么如果有噪声干扰,那么每个值都会随机增减小的数值:
∣ 2.1 2.9 13.3 3.5 4.2 18.1 6.4 7.6 36.5 ∣∣ ∣2.13.56.42.94.27.613.318.136.5∣ ∣| 2.1 2.9 13.3 3.5 4.2 18.1 6.4 7.6 36.5 | 至此秩=3,所以添加噪声后秩可能会增加(图像的秩很小,比如101行中1行独立和100行相关,添加白噪声后,100个相关变成不相干几乎是必然的,所以秩变小的几率有但是极小)。所以如果一个图片的秩很大,可以猜测存在噪声等问题,从而作为先验去噪等
4、低秩恢复算法
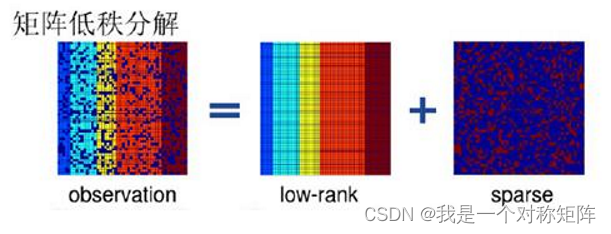
一幅清晰的自然图像其数据矩阵往往是低秩或者近似低秩的,但存在随机幅值任意大但是分布稀疏的误差破坏了原有数据的低秩性。低秩矩阵恢复是将退化图像看做一组低维数据加上噪声形成的,因此退化前的数据就可以通过低秩矩阵来逼近。
设B为模糊图像,根据低秩分解有B=I+N,其中矩阵I为清晰图像,是低秩的。矩阵N为噪声具有稀疏性。剩下的就是如何从退化的矩阵B中分解出矩阵低秩的I,这就是数学问题了。
所以低秩在图像上的应用就很广泛:

-
相关阅读:
【JavaSE】Comparable接口和Comparator接口
图像处理:推导Canny边缘检测算法
使用SPARK进行特征工程
JAVA培训之数据库表关联关系
【AIGC核心技术剖析】研究报告分享与汇总
会议邀请 | 思腾合力邀您共赴PRCV 2023第六届中国模式识别与计算机视觉大会
AIX360-CEMExplainer: MNIST Example
可爱女生图片到期了,怎么办?当前是把Python爬虫升级到【可爱头像】站
674. 最长连续递增序列 718. 最长重复子数组 1143.最长公共子序列 1035.不相交的线
Linux定时器
- 原文地址:https://blog.csdn.net/qq_40243750/article/details/126991079