-
什么是传递函数模型?
目录
传递函数模型的定义
传递函数模型使用多项式的比率来描述系统的输入和输出之间的关系。 模型阶数等于分母多项式的阶数。 分母多项式的根称为模型极点。 分子多项式的根称为模型零点。
传递函数模型的参数是它的极点、零点和传输延迟。
连续时间表示
在连续时间中,传递函数模型具有以下形式:
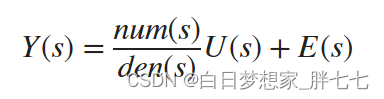
其中,Y(s)、U(s) 和 E(s) 分别表示输出、输入和噪声的拉普拉斯变换。 num(s) 和 den(s) 表示定义输入和输出之间关系的分子和分母多项式。
离散时间表示
在离散时间中,传递函数模型具有以下形式:
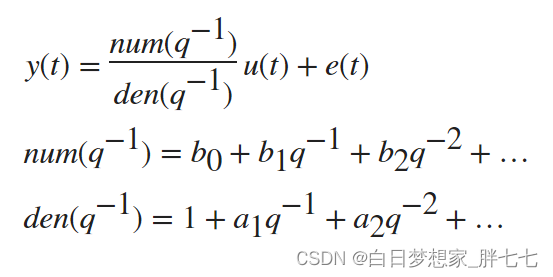
num(q^-1) 和 den(q^-1) 的根用滞后变量 q^-1 表示。
如果采用 Z 变换,则传递函数具有以下形式:
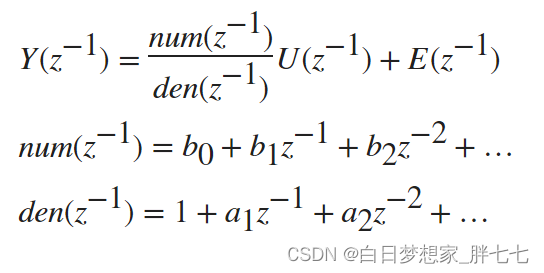
其中,Y(z-1)、U(z-1) 和 E(z-1) 分别表示输出、输入和噪声的 Z 变换。 z-1 是滞后算子的 Z 变换。
延迟
在连续时间中,输入和传输延迟的形式为:
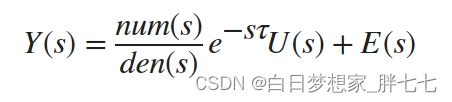
其中τ代表延迟。在离散时间:
其中 num 和 den 是滞后算子 q^(-1) 中的多项式。
多输入多输出模型
单输入单输出 (SISO) 连续传递函数的形式为
对应的传递函数模型可以表示为:
Y(s)=G(s)U(s)+E(s)
多输入多输出 (MIMO) 传递函数包含对应于系统中每个输入-输出对的 SISO 传递函数。 例如,具有两个输入和两个输出的连续时间传递函数模型具有以下形式:
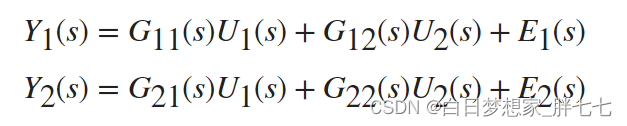
其中,Gij(s) 是第 i 个输出和第 j 个输入之间的 SISO 传递函数。 E1(s) 和 E2(s) 是对应于两个输出的噪声的拉普拉斯变换。
离散时间 MIMO 传递函数模型的表示是类似的。
-
相关阅读:
CSS 效果 圆形里一个文字居中
MongoDB是一个NoSQL数据库,有着多种不同的命令和操作。以下是一些常见的MongoDB命令:
【TiDB】一些很有意思的sql调优案例分享
【NI-DAQmx入门】NI-DAQmx之MATLAB/SIMULINK支持
AWS Systems Manager(SSM)
利用PPT导出一张高清图的方法,office与WPS只需要使用一个即可,我使用的是office。
基于STM32+华为云IOT设计的智能车库管理系统
ETL的数据挖掘方式
力扣647-回文字符串——中心扩展法
链表的简单描述及代码的简单实现
- 原文地址:https://blog.csdn.net/qq_38029916/article/details/126960644