-
基于VS2019编程实现的导弹惯性导航仿真导弹
题目内容及要求
导弹随飞机升空,在[30ºN,100ºE,1000m]的位置,以1200m/s的对地速度沿北向发射,保持匀速水平状态飞行100s,攻角、侧滑和滚转角均为零。假设导弹安装捷联式惯性导航系统,导航系统三轴指向和飞机本体一致,即捷联式惯性导航系统本体坐标系和导弹本体坐标系保持一致。惯性器件的采样周期为0.01s,,采用GNSS辅助INS,,输出周期为1s,试计算GNSS/INS组合导航输出数值。
A 导弹本体坐标系采用前上右体制,导航坐标系定义北天东坐标系。敏感测量数值包括比力、绝对角速度信息。导航输出飞行位置(经度、纬度、高度)、速度(北向、天向、东向)、姿态(俯仰、偏航和滚转)。
B导弹本体坐标系采用前上右体制,导航坐标系和惯性坐标系均定义为发射时刻的地面发射坐标系(该坐标系发射后处于静止状态),假设发射瞬间地球坐标系和地心惯性坐标系坐标轴重合。敏感测量数值包括比力、绝对角速度信息。导航输出飞行位置、速度(地面发射坐标系内的直角坐标和速度)、姿态(俯仰、偏航和滚转,本体系相对发射坐标系)。
1 要求:
a 基于捷联惯性系统,推导飞行器本体坐标系相对于导航坐标系的比力方程,建立比力和导航坐标系内运动加速度之间的关系模型;
b 基于捷联惯性系统,推导飞行器本体坐标系相对于导航坐标系的相对旋转角速度模型,建立陀螺仪测量的绝对旋转角速度和相对旋转角速度的关系模型;
c 建立基于捷联惯性系统的比力、绝对旋转角速度的线运动导航算法模型、角运动导航算法模型
d 算法可以自行更改飞行器初始飞行参数,比如初始姿态、位置和速度信息。
e 组合算法可采用输出或反馈修正,可自行确定。
f 完成基于位置组合、位置/速度组合的GNSS/INS卡尔曼滤波算法设计。算法至少包括四个模块,第一个模块输出标准运动信息,第二个模块模拟惯性器件测量误差和相应的捷联惯性系统计算,第三个模块输出模拟的GNSS测量信息,第四个模块完成组合/滤波计算。
g 编程完成仿真计算,输出三轴加速度计输出信息(比力信息)、三轴陀螺仪输出信息(绝对角速度信息)、INS导航信息、组合导航信息。2部分模型参数:
A 地球椭球模型WGS-84椭球,长半轴6378137m,扁率298.257223563,地球自转角速度7.292115×10-5 rad/s;重力加速度取恒定值9.8m/s2;
B 姿态坐标旋转顺序可采用但不限定231体制,只要算法封闭正确即可。
C 假设惯性器件测量误差包括一阶马尔科夫过程和白噪声,加速度计对应的一阶马尔科夫过程均方差为10-5g0(1σ)(此处单位不正确,但暂时按此考虑),时间常数为1h,对应白噪声均方差为10-6g0(1σ);本文转载自http://www.biyezuopin.vip/onews.asp?id=16769陀螺仪对应的一阶马尔科夫过程均方差为1º/h(1σ)(此处单位不正确,但暂时按此考虑),时间常数为1h,对应白噪声均方差为0.1 º/h(1σ)。GNSS的位置、速度测量精度分别为10m(1σ),0.1m/s(1σ)。INS初始位置、速度和姿态对准精度为10m(1σ),0.1m/s(1σ),0.1º(1σ)。
目录- 题目内容及要求 1
2部分模型参数: 2 - 模型建立 3
2.1 坐标系基准确定 3
2.2 比力方程推导 5
2.2.3 说明 5
2.3 姿态旋转角速度关系推导 5
2.3.3 说明 6
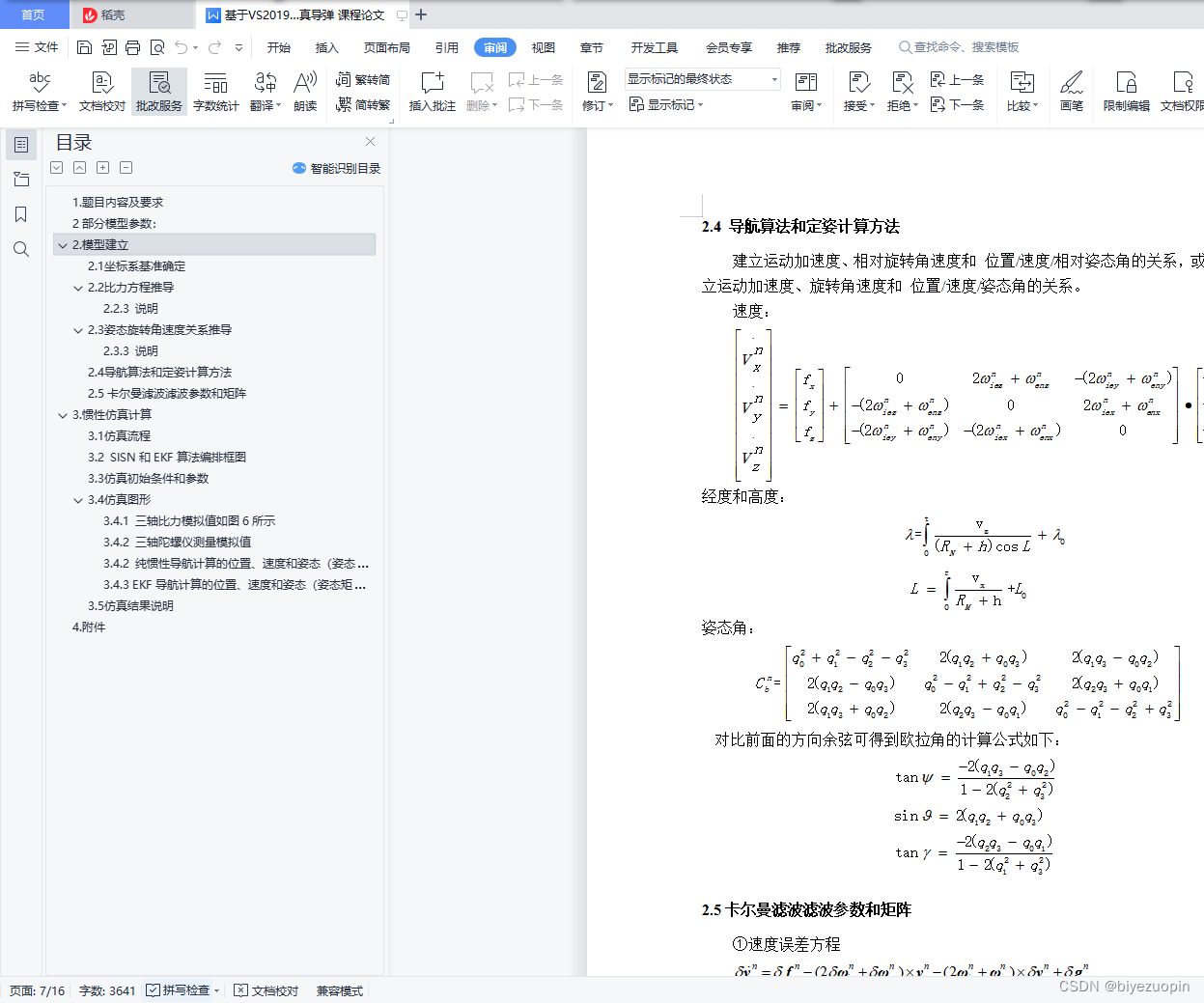
2.4 导航算法和定姿计算方法 6
2.5卡尔曼滤波滤波参数和矩阵 7 - 惯性仿真计算 10
3.1 仿真流程 10
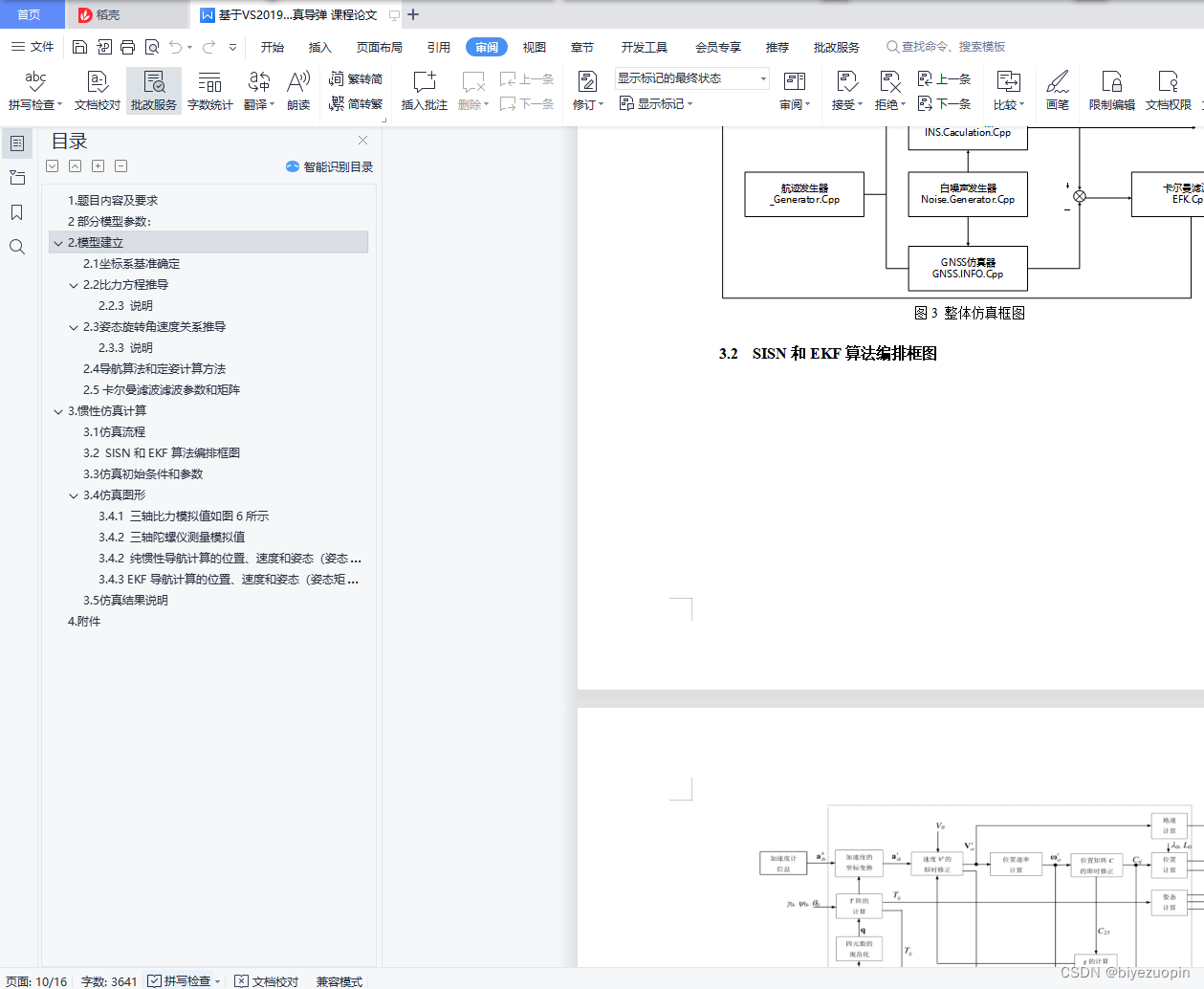
3.2 SISN和EKF算法编排框图 10
3.3 仿真初始条件和参数 11
3.4 仿真图形 12
3.4.1 三轴比力模拟值如图6所示 12
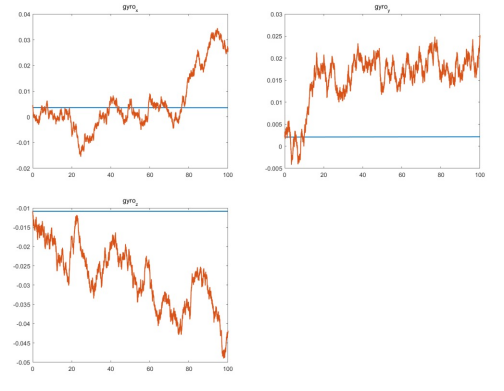
3.4.2 三轴陀螺仪测量模拟值 12
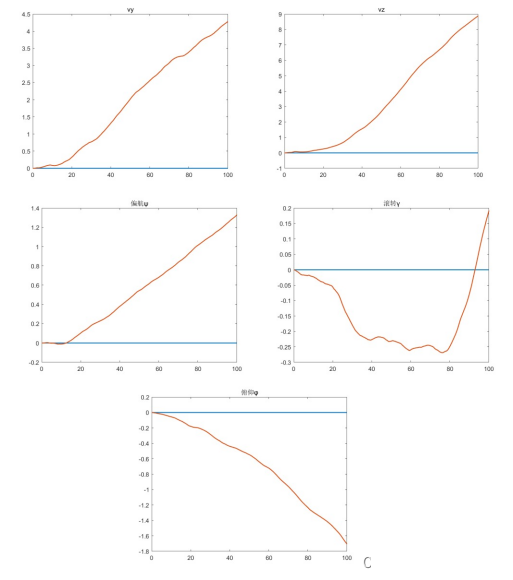
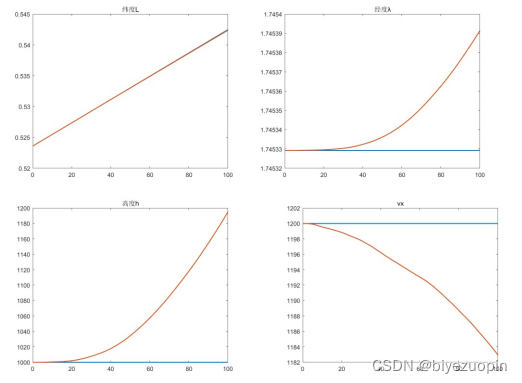
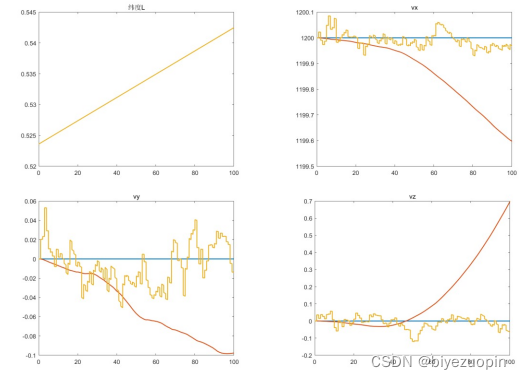
3.4.2 纯惯性导航计算的位置、速度和姿态(姿态矩阵) 13
3.4.3 EKF导航计算的位置、速度和姿态(姿态矩阵) 14
3.5 仿真结果说明 15 - 附件 15
#pragma once #include#include #include #include "math.h" #include //随机数 #include //C++ 矩阵计算工具 #include #include - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110


- 题目内容及要求 1
-
相关阅读:
计算机毕业设计ssm+vue基本微信小程序的垃圾分类系统
【Vue五分钟】 五分钟了解Vue组件的核心概念
Java中通过List中的stream流去匹配相同的字段去赋值,避免for循环去查询数据库进行赋值操作
TCP的可靠性之道:确认重传和流量控制
Arduino追光小车
ubuntu 22.04 配置 Prometheus 和 Grafana 服务器监控
ldc概述
2023CSPJ 旅游巴士 —— dijkstra
基于grafana+elk等开源组件的 云服务监控大屏架构
计算机提示vcomp120.dll丢失怎样修复,vcomp120.dll丢失的4个修复方法分享
- 原文地址:https://blog.csdn.net/sheziqiong/article/details/126946027
