-
从零开始学定位 --- 使用kaist数据集进行LIO-SAM建图
之前的文章只是将数据的雷达在rviz中进行可视化了,并没有实际用起来。
这篇文章将使用Kaist Urban08 数据使用LIO-SAM进行三维点云地图的构建。
1 clone 工程
仓库的地址是
https://github.com/xiangli0608/Learning_localization_from_scratch_ws
代码已经写好,直接编译就可以了。由于放入了LIO_SAM,所以需要依赖 gtsam 4.0.2 。
2 bag的转录
之前说过可以用 file_player的形式将数据放出来,但是没有通过bag播放数据方便。所以这一步先将kaist数据集转成bag文件。
转录使用的工具是 kaist2bag,这个工具已经放在工程里了,可以直接用,在 src/kaist_tool/kaist2bag。
这是别人的开源项目,这里直接用了,首先感谢一下这个老哥。
kaist2bag/README.md 里有说怎么进行使用,这里简单说明一下。
2.1 修改路径
首先更改 src/kaist_tool/kaist2bag/config/config.ymal
将前2行进行更改, dataset是数据集的路径,save_to是新生成的bag保存的路径
dataset: "/home/touchair/kaist_urban_dataset/urban08" save_to: "/home/touchair/kaist_urban_dataset/urban08/bag"- 1
- 2
在这个config里还可以进行是否输出某些topic的选择。
2.2 生成bag
之后通过如下命令执行launch
roslaunch kaist2bag kaist2bag.launch执行之后程序会运行一段时间,运行结束之后会在 svae_to 文件夹生成很多个bag, 每个topic一个bag。
接下来就是对这些bag进行合并。
2.3 合并bag
上个步骤生成的bag是一个topic一个bag,所以想要跑的话需要将这些bag合并一下。
合并的命令为
rosrun kaist2bag mergebag.py merged.bag...
merged.bag是最后输出的bag,以及之后的bag的名称,是需要合并的bag,这里可以使用绝对路径也可以使用相对路径。 通过这步,咱就将kaist的数据集转成了bag。
这一部分参考了勇哥知乎上的文章
KAIST数据集转换为rosbag https://zhuanlan.zhihu.com/p/5447667903 运行LIO-SAM进行建图
3.1 修改bag名字
需要将bag的名字修改到 src/mapping/LIO-SAM/launch/run.launch 中的 bag_filename 变量中。
3.2 运行LIO-SAM
之后运行lio-sam,运行之前别忘了要source一下。
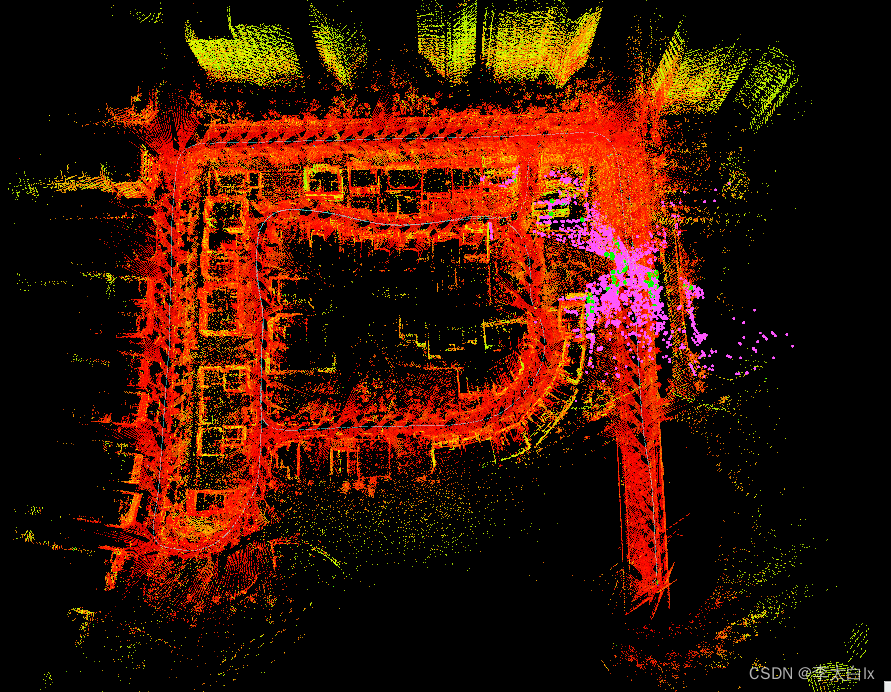
roslaunch lio_sam run.launch之后就会出现已经配置好的rviz界面,如下所示:
4 输出轨迹进行evo评估
想要评估建图效果,可以用建图的轨迹与数据集提供的真值做对比,进行精度分析。
代码里目前实现了输出轨迹文件的功能。evo需要的是txt格式的轨迹,数据集提供的真值是csv格式的,所以需要做一下转换。
4.1 将kaist数据集提供的真值转成tum格式
这一步需要安装依赖项
pip3 install numpy scipy
已经填写在 install_dependence.sh 文件中。
执行步骤为./src/scripts/kaist2evo.py -p /media/trunk/Trunk/0-LX/Kaist/Urban08-p 后边接的是数据集的文件夹,之后可以加 -o 加输出轨迹文件的地址。
执行之后会在Urban08文件夹下生成2个txt文件,分别是 tum_ground_truth.txt 与 tum_vrs_gps.txt。
- tum_ground_truth.txt 是将 global_pose.csv 转成的tum格式的轨迹文件
- tum_vrs_gps.txt 是将 sensor_data/vrs_gps.csv 转成的tum格式的轨迹文件
当然,这个我已经转好了,放在了 src/doc/ground_truth 文件夹下,不再需要自己转了。
4.2 进行evo轨迹对比
当lio-sam结束建图之后,会在 Downloads/LOAM 文件夹下生成pcd地图,同时会在 src/doc/mapping_results 文件夹下生成 tum 格式的轨迹文件。
然后将 src/doc/ground_truth/tum_ground_truth.txt 与 src/doc/mapping_results/tum_lio_sam_pose.txt 这两个文件,分别填在 src/scripts/evo.sh 的 txt1 与 txt2 中
在执行
src/scripts/evo.sh即可绘制轨迹图,ape图,rpe图。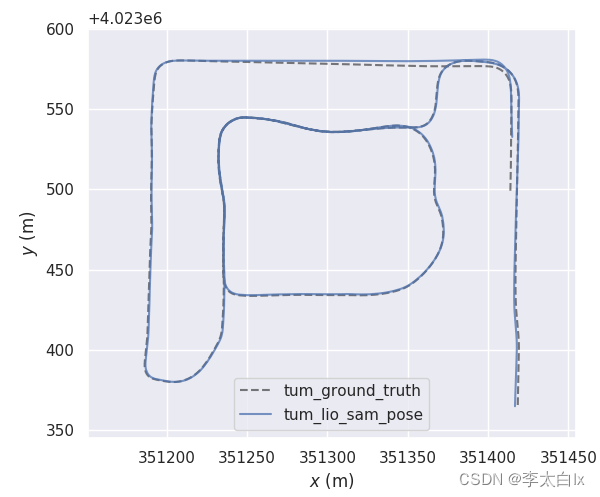
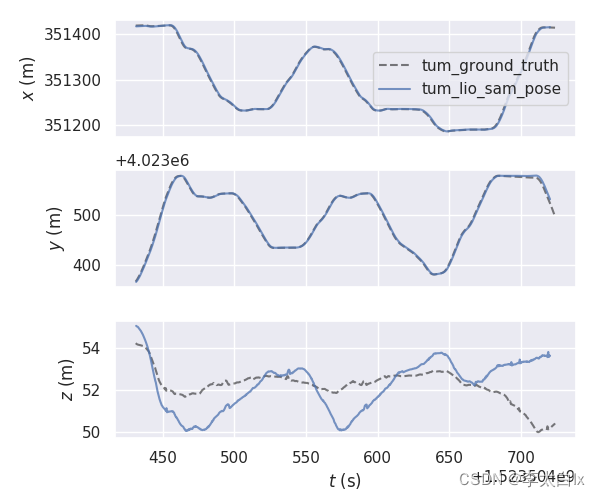
可以看到,z方向上还是偏差比较大的,之后存在改进空间。5 代码的改动内容
5.1 添加ring字段
由于lio-sam需要ring字段的数据,但是Kaist数据集中的vlp并没有这个字段,这时ring字段可以自己算一下再添加到点云中。
float angle; uint16_t ring; while (!file.eof()) { PointXYZIR point; file.read(reinterpret_cast<char *>(&point.x), sizeof(float)); file.read(reinterpret_cast<char *>(&point.y), sizeof(float)); file.read(reinterpret_cast<char *>(&point.z), sizeof(float)); file.read(reinterpret_cast<char *>(&point.intensity), sizeof(float)); // 先计算角度,根据角度得到ring,然后将ring添加到点云中 angle = atan2(point.z, sqrt(point.x * point.x + point.y * point.y)) / M_PI * 180 + 15; ring = round(angle / 2); point.ring = ring; pcl_cloud.points.push_back(point); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
5.2 注释掉lio-sam中time字段检查
暂时将lio-sam中的time字段检查给注释掉了。每个点的时间戳现在还没有考虑好怎么做。
没有time字段,自然也就没有做运动畸变去除。运动畸变去除这里也注释掉了。
5.3 订阅左右2个雷达数据
KAIST数据集有两个激光雷达,左右对称分布,且安装位置和地面有一定倾斜,但是IMU安装位置是平行于地面的。
之前lio-sam原版代码只订阅一个点云都话题。当只使用Kaist数据集的1个点云数据进行建图的效果不太好,所以将lio-sam改成订阅2个点云话题了。
具体的代码处理逻辑如下:
- 订阅2个雷达数据
- 将左右激光雷达通过lidar到IMU的外参转换到IMU系下,以减少其他坐标转换带来的影响
- 再完成2个点云的合并得到一个range image
具体代码改动如下所示
回调从1个回调 cloudHandler,改成了 pointCloudLeftHandler 与 pointCloudRightHandler 2个回调
右雷达为辅雷达,其回调如下所示。
void pointCloudRightHandler(const sensor_msgs::PointCloud2ConstPtr &rightPointCloud) { std::lock_guard<std::mutex> lock1(veloLock); cachePointCloudRightQueue.push_back(*rightPointCloud); if (cachePointCloudRightQueue.size() < 5) { return; } currentPointCloudRightMsg = std::move(cachePointCloudRightQueue.front()); cachePointCloudRightQueue.pop_front(); pcl::moveFromROSMsg(currentPointCloudRightMsg, *pointCloudRightIn); if (pointCloudRightIn->is_dense == false) { ROS_ERROR("Point cloud is not in dense format, please remove NaN points first!"); ros::shutdown(); } pcl::PointCloud<PointXYZIRT>::Ptr pointCloudOut(new pcl::PointCloud<PointXYZIRT>()); pointCloudOut = transformPointCloud(pointCloudRightIn, rightLidarToImu); pointCloudRightQueue.push_back(pointCloudOut); return; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
先进行数据的缓存,然后转成pcl格式,再调用transformPointCloud函数将雷达从雷达坐标系下转到imu坐标系下。
左侧点云为主雷达,就是之前lio-sam的雷达回调,但是多了个先转到imu坐标系下,与点云合并这2个操作。
其中合并点云的代码如下所示
void mergePointCloud() { std::lock_guard<std::mutex> lock1(veloLock); if(pointCloudLeftQueue.size() > 3 && pointCloudRightQueue.size() > 3) { pointCloudLeft = std::move(pointCloudLeftQueue.front()); pointCloudLeftQueue.pop_front(); pointCloudRight = std::move(pointCloudRightQueue.front()); pointCloudRightQueue.pop_front(); *pointCloudFull = *pointCloudLeft + *pointCloudRight; } else { ROS_DEBUG("Waiting for point cloud data ..."); return; } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
5.5 EKF节点替换
原版的LIO-SAM使用EKF节点输出gps数据转换的Odometry。
现在修改成使用原始GNSS的数据,进行转换,输出里程计以供mapOptmization节点使用。
转换的顺序如下:LLA --> ECEF --> ENU,坐标系示意图如下
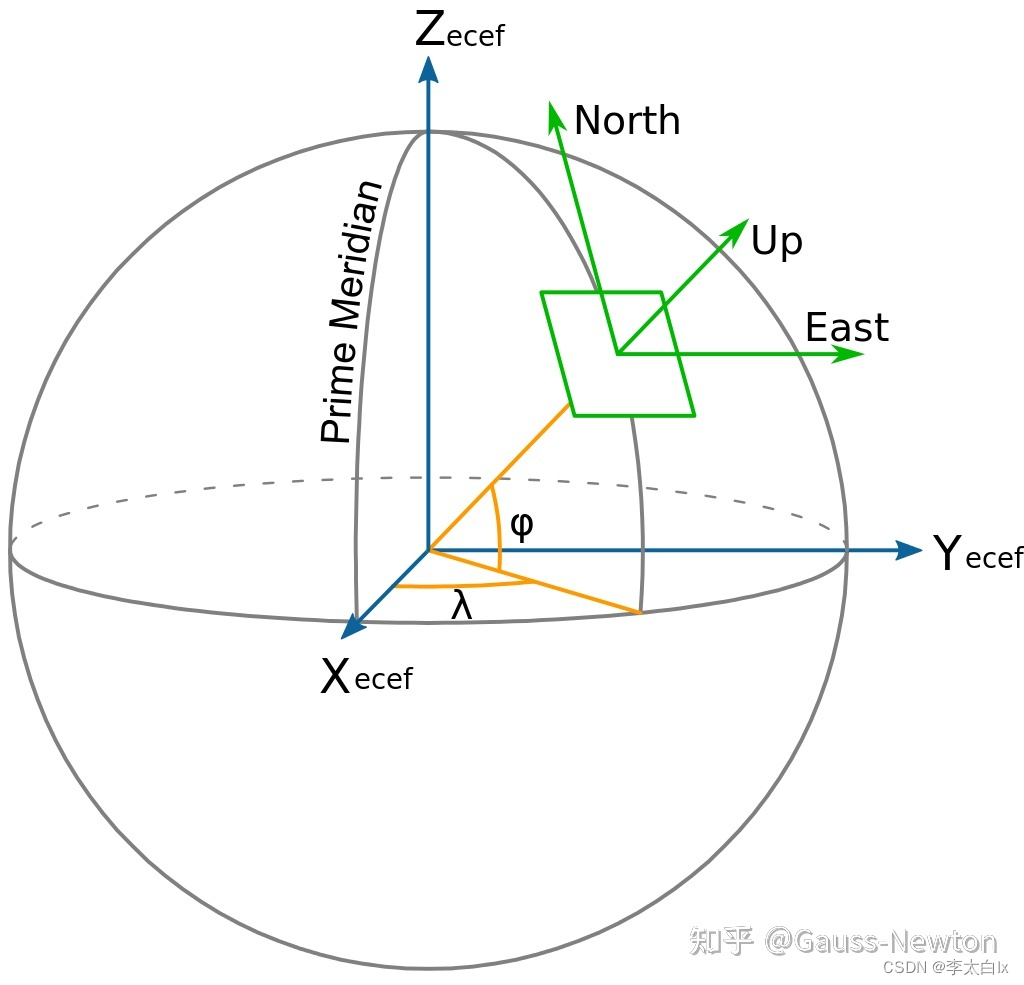
最终得到ENU系下的gps坐标,代码如下// convert LLA to XYZ Eigen::Vector3d lla = gtools.GpsMsg2Eigen(*msg); Eigen::Vector3d ecef = gtools.LLA2ECEF(lla); Eigen::Vector3d enu = gtools.ECEF2ENU(ecef);- 1
- 2
- 3
- 4
也可以使用GeographicLib库替换,代码非常简单
GeographicLib::LocalCartesian geoConverter; //初始化 if(!init) { geoConverter.Reset(gps_msg_ptr->latitude, gps_msg_ptr->longitude, gps_msg_ptr->altitude); init = true; } geoConverter.Forward(gps_msg_ptr->latitude, gps_msg_ptr->longitude, gps_msg_ptr->altitude- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
5.6 输出轨迹
为了评估建图效果,需要将建图轨迹输出并和真值对比。所以代码里添加了将优化后的轨迹输出的功能。
具体函数如下
// 输出轨迹到txt void saveGlobalPath() { std::string lio_sam_path = ros::package::getPath("lio_sam"); int npos_1 = lio_sam_path.find_last_of("/"); std::string path = lio_sam_path.substr(0, npos_1); int npos_2 = path.find_last_of("/"); // src文件夹 std::string src_path = path.substr(0, npos_2); std::ofstream tum_pose(src_path + "/doc/mapping_results" + "/tum_lio_sam_pose.txt"); tum_pose.setf(std::ios::scientific, std::ios::floatfield); for (auto ite = globalPath.poses.begin(); ite != globalPath.poses.end(); ite++) { geometry_msgs::PoseStamped pose_stamped = *ite; // tum格式的轨迹 tum_pose << pose_stamped.header.stamp << " " << pose_stamped.pose.position.x << " " << pose_stamped.pose.position.y << " " << pose_stamped.pose.position.z << " " << pose_stamped.pose.orientation.x << " " << pose_stamped.pose.orientation.y << " " << pose_stamped.pose.orientation.z << " " << pose_stamped.pose.orientation.w << std::endl; } tum_pose.close(); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
这个函数会在结束程序的时候执行,也就是按 ctrl c 之后才会执行。保存轨迹的目录是 src/doc/mapping_results 文件夹里,保存的文件名是 tum_lio_sam_pose.txt 。
5.7 代码中一些其他的改动
- 注释掉了运动畸变去除的代码
- 对平移与旋转的预测部分的代码进行了更改,但是还存在一些问题
- 对imu的频率,是否使用里程计,是否使用gps,添加了参数控制是否使用
- 加入了左右激光雷达到IMU的外参的参数
6 待优化与实现项
6.1 待优化项
- 计算time字段,然后进行运动畸变的去除
- 平移与旋转的预测部分的代码还存在一些问题
- 解决imu的零偏问题,初始时进行零偏估计
- 添加GPS约束后初始一段时间内偶发不收敛的情况,这是个待修复的bug
- Urban08这个数据集的最后会出现高度差,这时回环找不到,就优化不过来,需要解决
6.2 待实现项
如果哪位同学下载了Kaist的别的数据集,可以帮忙测试下,别的数据集需要改一下 LIO-SAM/config/params.yaml 中的雷达到imu的坐标变换,如果做的话可以加我微信,一起聊聊。
Contributors
这篇文章的代码实现是由 赵焕峰,周勇,李维 三位同学完成的,感谢这两位同学的贡献。
结语
这篇文章的代码其实早都写完了,但是一直没写文章。一方面是工作事情很多,下班也晚,一方面也是自己懒了。
接下来的计划是通过这个不太完美的地图跑一下定位。
先从odom与imu的融合开始。
REFERENCES
-
相关阅读:
LeetCode 0525. 连续数组:哈希表 + 前缀和
手写小程序摇树工具(四)——遍历wxml、wxss、wxs文件
[nodejs]NVM使用指南
【深度学习驱动流体力学】完整配置安装 OpenFOAM 及其所需的ThirdParty与QT5工具
Go 语言学习记录一
Ruoyi 从数据库中导出多个excel打包为zip
【论文简述】Cross-Attentional Flow Transformer for Robust Optical Flow(CVPR 2022)
Schrodinger Shape Screen 工具使用方法
搭建docker镜像仓库(一):使用registry搭建本地镜像仓库
相同二叉树和镜面二叉树问题
- 原文地址:https://blog.csdn.net/tiancailx/article/details/126861305