-
SLAM用到的矩阵论知识
1.行矩阵、列矩阵
m × n m×n m×n阶矩阵中, m = 1 m=1 m=1称为行矩阵,也称为 n n n维行向量; n = 1 n=1 n=1称为列矩阵,也称为 m m m维列向量。
2.矩阵的转置
假设A和B是两个 m × n m \times n m×n的矩阵, λ \lambda λ是一个常数,有:
- ( A T ) T = A (A^T)^T=A (AT)T=A
- ( A B ) T = B T A T (AB)^{T} = B^{T}A^T (AB)T=BTAT, ( A B ) − 1 = B − 1 A − 1 (AB)^{-1} = B^{-1}A^{-1} (AB)−1=B−1A−1
- ( A + B ) T = A T + B T (A+B)^T=A^T+B^T (A+B)T=AT+BT
- ( λ A ) T = λ A T (\lambda A)^T=\lambda A^T (λA)T=λAT
- ( A T ) − 1 = ( A − 1 ) T (A^T)^{-1}= (A^{-1})^T (AT)−1=(A−1)T
对转置矩阵求导 :
d x T d x = I \frac{dx^T}{dx}= I dxdxT=I
( A x ) T d x = A T \frac{(Ax)^T}{dx}= A^T dx(Ax)T=AT3.奇异矩阵
奇异矩阵和非奇异矩阵首先是方阵,其次奇异矩阵的秩不是满秩,即 ∣ A ∣ = 0 |A|=0 ∣A∣=0
4.对称矩阵与反对称矩阵
设 A A A是 n n n阶方阵,如果 A T = A A^T=A AT=A,则称 A A A是对称矩阵。如果 A T = − A A^T=-A AT=−A,则称 A A A为反对称矩阵。反对称矩阵中,主对角线上的元素均为0。
- ( A B ) T = B T A T (AB)^T=B^TA^T (AB)T=BTAT
5.正定矩阵
正定矩阵:
- 广义定义: 设 M M M是 n n n阶方阵,如果对任何非零向量 z z z,都有 z T M z > 0 z^TMz>0 zTMz>0,就称M为正定矩阵
- 性质:
- 正定矩阵的行列式恒为正
- 若 A A A是正定矩阵,则 A T A^T AT也是正定矩阵
- 两个正定矩阵的和是正定矩阵
- 正实数与正定矩阵的乘积是正定矩阵
- 正定矩阵的特征值均为正
- 正定矩阵存在实可逆矩阵l,使得 A = l T l A=l^Tl A=lTl
- 正定矩阵存在秩为mxn的实矩阵l,使得 A = l T l A=l^Tl A=lTl
- 正定矩阵存在主对角元素全为正的实三角元素R,使得 A = l T l A=l^Tl A=lTl
M M M为正定矩阵 < = > x T M x > 0 <=> x^TMx > 0 <=>xTMx>0 for all x ∈ R n x \in \mathbb R^n x∈Rn
M M M为半正定矩阵 < = > x T M x ⩾ 0 <=> x^TMx \geqslant 0 <=>xTMx⩾0 for all x ∈ R n x \in \mathbb R^n x∈Rn5.1 对称正定矩阵
设 A ∈ R n × n A \in R^ {n\times n} A∈Rn×n,若 A = A T A=A^T A=AT,对任意 0 ≠ X ∈ R n 0\not=X \in R^n 0=X∈Rn,都有 X T A X > 0 X^TAX>0 XTAX>0,则称A为对称正定矩阵
6.实对称矩阵
7.伴随矩阵
设矩阵 A A A中, A i j A_{ij} Aij为行列式 ∣ A ∣ |A| ∣A∣中元素 a i j a_{ij} aij的代数余子式,称 A ∗ A^* A∗为矩阵 A A A的伴随矩阵。
- A A ∗ = A ∗ A = ∣ A ∣ E AA^*=A^*A=|A|E AA∗=A∗A=∣A∣E
- ( A ∗ ) T = ( A T ) ∗ (A^*)^T=(A^T)^* (A∗)T=(AT)∗, ( k A ) ∗ = k n − 1 A ∗ (kA)^*=k^{n-1}A^* (kA)∗=kn−1A∗
设 A A A可逆:
- A ∗ = ∣ A ∣ A − 1 A^*=|A|A^{-1} A∗=∣A∣A−1
- ( A ∗ ) − 1 = ( A − 1 ) ∗ = ∣ A ∣ − 1 A (A^*)^{-1}=(A^{-1})^*=|A|^{-1}A (A∗)−1=(A−1)∗=∣A∣−1A
- ( A B ) ∗ = B ∗ A ∗ (AB)^*=B^*A^* (AB)∗=B∗A∗
- ( A ∗ ) ∗ = ∣ A ∣ n − 2 A (A^*)^*=|A|^{n-2}A (A∗)∗=∣A∣n−2A
8.正交阵
正交可以理解为垂直
正交阵是指满足 A A T = E AA^T=E AAT=E或者 A T A = E A^T A=E ATA=E的 n n n阶方阵 A A A,其中 E E E为n阶单位阵。
A A T = [ α 1 α 2 . . . α n ] [ α 1 T α 2 T . . . α n T ] = [ α 1 α 1 T α 1 α 2 T . . . α 1 α n T α 2 α 1 T α 2 α 2 T . . . α 2 α n T . . . α n α 1 T α n α 2 T . . . α n α n T ] = [ 1 0 . . . 0 0 1 . . . 0 . . . 0 0 . . . 1 ] = E AA^T =[ α 1 α 2 . . . α n ] =[ α 1 T α 2 T . . . α n T ] =[ α 1 α 1 T α 1 α 2 T . . . α 1 α n T α 2 α 1 T α 2 α 2 T . . . α 2 α n T . . . α n α 1 T α n α 2 T . . . α n α n T ] = E AAT= α1α2...αn [α1Tα2T...αnT]= α1α1Tα2α1T...αnα1Tα1α2Tα2α2Tαnα2T.........α1αnTα2αnTαnαnT = 10...0010.........001 =E[ 1 0 . . . 0 0 1 . . . 0 . . . 0 0 . . . 1 ] 如果矩阵的各列向量都是单位向量,并且两两正交。那么就说这个矩阵是正交矩阵。
- 性质:
设A是n阶正交阵,则
- A T = A − 1 A^T = A^{-1} AT=A−1
- A T A = A A T = E A^TA=AA^T=E ATA=AAT=E( E E E是 n n n阶单位阵);
- 若 A A A是正交阵,则 A T A^T AT或 A − 1 A^{-1} A−1亦是正交阵;
- 若 A 、 B A、B A、B是正交阵,则 A B AB AB亦是正交阵;
- ∣ A ∣ = 1 |A|=1 ∣A∣=1或 ∣ A ∣ = − 1 |A|=-1 ∣A∣=−1;
- 实对称阵的对应不同特征值的特征向量正交;
- 凡是正交矩阵,一定可以对角化。
对角化:参考相似矩阵,本质就是 A = P − 1 B P A=P^{-1}BP A=P−1BP , 也就是说一个矩阵A可以转为一个对角阵B.
正交矩阵:本身就是相互垂直,只是说它不见得是各个标准轴。以三维空间为例,我们希望正交矩阵是:
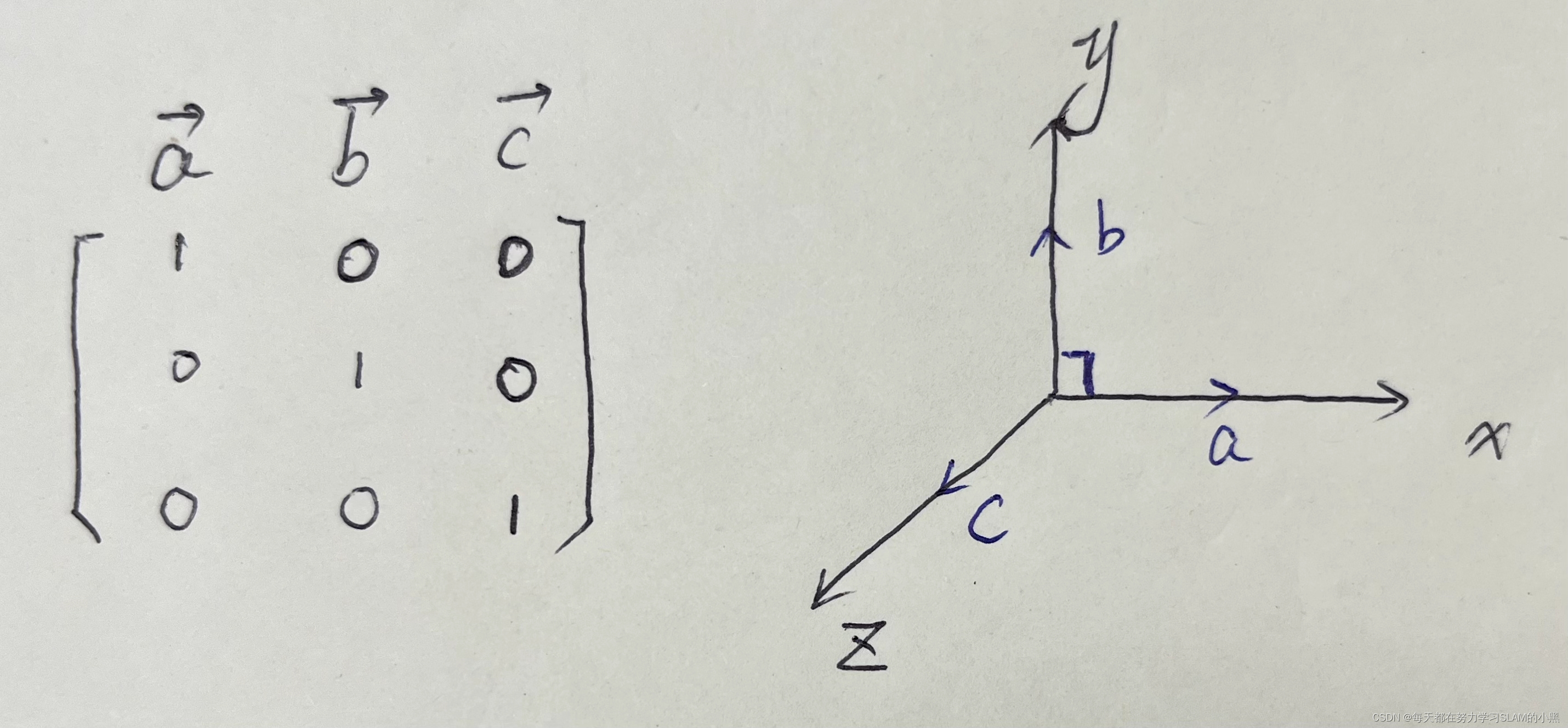
但是实际他很可能为下边这个样子
 亦即以z轴为中心逆时针旋转了45°, 此时向量a,b,c依然相互正交,但是其列向量并不都在标准轴上.
亦即以z轴为中心逆时针旋转了45°, 此时向量a,b,c依然相互正交,但是其列向量并不都在标准轴上.即正交阵是一个在三维坐标系中歪着摆的立方体,对角化就是把这个立方体摆正回来(也就是让它的某个顶点放在原点上,同时这个原点的三条边正好对在三维坐标系xyz三个轴上)
9.准对角形矩阵
设 A A A为 n n n阶方阵,如果它的分块矩阵具有如下形式: [ A 1 0 . . . 0 0 A 2 . . . 0 . . . 0 0 . . . A n ]
A10...00A20.........00An 则称 A A A为准对角形矩阵。[ A 1 0 . . . 0 0 A 2 . . . 0 . . . 0 0 . . . A n ] [ A 1 0 . . . 0 0 A 2 . . . 0 . . . 0 0 . . . A n ] − 1 = [ A 1 − 1 0 . . . 0 0 A 2 − 1 . . . 0 . . . 0 0 . . . A n − 1 ]
^{-1} =[ A 1 0 . . . 0 0 A 2 . . . 0 . . . 0 0 . . . A n ] A10...00A20.........00An −1= A1−10...00A2−10.........00An−1 [ A 1 − 1 0 . . . 0 0 A 2 − 1 . . . 0 . . . 0 0 . . . A n − 1 ] [ A 1 0 . . . 0 0 A 2 . . . 0 . . . 0 0 . . . A n ] − 1 = [ A 1 − 1 0 . . . 0 0 A 2 − 1 . . . 0 . . . 0 0 . . . A n − 1 ]
^{-1} =[ A 1 0 . . . 0 0 A 2 . . . 0 . . . 0 0 . . . A n ] A10...00A20.........00An −1= A1−10...00A2−10.........00An−1 [ A 1 − 1 0 . . . 0 0 A 2 − 1 . . . 0 . . . 0 0 . . . A n − 1 ] 10.矩阵求导
11.矩阵运算规则
设 A = ( a i j ) m × n , B = ( b i j ) n × l A=(a_{ij})_{m\times n},B=(b_{ij})_{n\times l} A=(aij)m×n,B=(bij)n×l,则对于A与B的乘积 C = A B C=AB C=AB有:
C C C的第 i i i行第 j j j列元素 c i j c_{ij} cij由 A A A的第 i i i行元素与 B B B的第 j j j列元素对应相乘,再取乘积之和
12 n阶方阵
m × n m×n m×n阶矩阵 A A A中, m = n m=n m=n;
n n n阶方阵 A A A,可定义行列式记为 ∣ A ∣ |A| ∣A∣;
n n n阶方阵存在主对角线及主对角线元素。
- ∣ A B ∣ = ∣ A ∣ ∣ B ∣ |AB|=|A||B| ∣AB∣=∣A∣∣B∣
- ∣ A 1 A 2 . . . A n ∣ = ∣ A 1 ∣ ∣ A 2 ∣ . . . ∣ A n ∣ |A_1A_2...A_n|=|A_1||A_2|...|A_n| ∣A1A2...An∣=∣A1∣∣A2∣...∣An∣
- ∣ A T ∣ = ∣ A ∣ , ∣ A − 1 ∣ = ∣ A ∣ − 1 |A^T|=|A|,|A^{-1}|=|A|^{-1} ∣AT∣=∣A∣,∣A−1∣=∣A∣−1
- ∣ k A ∣ n = k n ∣ A ∣ |kA|_n=k^n|A| ∣kA∣n=kn∣A∣
- ∣ A ∗ ∣ n = ∣ A ∣ n − 1 |A^*|_n=|A|^{n-1} ∣A∗∣n=∣A∣n−1
参考
https://blog.csdn.net/shyjhyp11/article/details/123224556
https://zhuanlan.zhihu.com/p/258464098
https://zhuanlan.zhihu.com/p/50431187 -
相关阅读:
CANoe-vTESTstudio之Test Diagram编辑器(元素介绍)
【学习笔记】《The Linux Command Line》第一部分 1 - 11 章(shell、进程、重定向、命令等)
Java接入sqlserver的一些坑点记录
CSS 常用样式-文本属性
初识RabbitMQ - 安装 - 搭建基础环境
抖音短视频矩阵系统多账号矩阵源头开发源码分享
新版HBuilderX在uni_modules创建搜索search组件
Java项目:SSM在线化妆品网站
红日靶场五(vulnstack5)渗透分析
ResNet架构解析
- 原文地址:https://blog.csdn.net/weixin_45626706/article/details/126333057