-
无人机中的坐标系与相机姿态计算
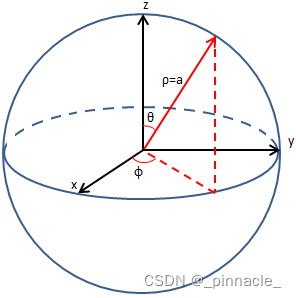
球坐标系
球坐标系是三维坐标系中的一种,在无人机中一般使用球坐标系来表示相机姿态,相机姿态的坐标是相对于无人机的,而无人机的飞行姿态则是相对于大地坐标系的。这里我们使用的相机是2自由度的相机,即可以水平 ϕ \phi ϕ 和垂直 θ \theta θ 两个方向转动,其中 ϕ ∈ [ 0 , 2 π ] \phi \in [0,2\pi] ϕ∈[0,2π] 或 [ − π , π ] [-\pi,\pi] [−π,π], θ ∈ [ 0 , π ] \theta \in [0,\pi] θ∈[0,π],这里 ρ \rho ρ 为球半径(默认我们使用右手坐标系)
球坐标与笛卡尔坐标的转换
在后面的计算中因为球坐标不方便作旋转变换,我们需要用到球坐标与笛卡尔坐标的坐标转换
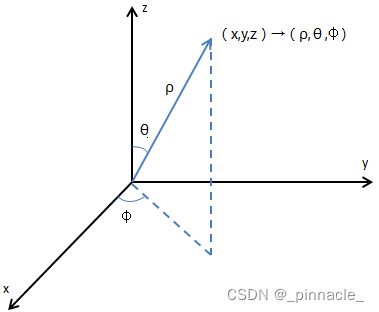
球坐标到笛卡尔坐标
x = ρ ∗ s i n ( θ ) ∗ c o s ( ϕ ) x =\rho*sin(\theta)*cos(\phi) x=ρ∗sin(θ)∗cos(ϕ)
y = ρ ∗ s i n ( θ ) ∗ s i n ( ϕ ) y=\rho*sin(\theta)*sin(\phi) y=ρ∗sin(θ)∗sin(ϕ)
z = ρ ∗ c o s ( θ ) z=\rho*cos(\theta) z=ρ∗cos(θ)
笛卡尔坐标到球坐标
ρ = x 2 + y 2 + z 2 \rho = \sqrt{x^2+y^2+z^2} ρ=x2+y2+z2
θ = a r c c o s ( z ÷ ρ ) \theta = arccos(z \div \rho) θ=arccos(z÷ρ)
ϕ = a r c t a n ( y , x ) \phi=arctan(y,x) ϕ=arctan(y,x)
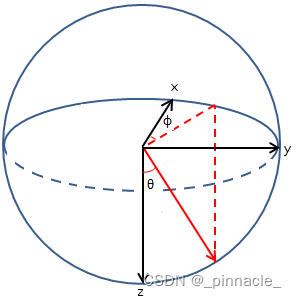
相机相对大地坐标系的姿态
为了计算方便,我们一般旋转坐标系将 z z z轴向下,这个时候无人机机头方向即是 x x x 轴方向, ϕ \phi ϕ即是相对于无人机机头的相机水平旋转角度, θ \theta θ在垂直于无人机方向上为0度;这时的无人机载体的坐标系就是我们常用的北东地坐标系(NED,即 x x x轴指向北, y y y轴指向东, z z z轴指向地面)。
在无人机飞行中,无人机平台由于飞行运动及气流运动等因素,会影响无人机的飞行姿态,这时搭载的相机姿态相对大地坐标系会发生变化,需要加入无人机姿态去计算修正,以便于更准确计算相机的观测位置
无人机姿态一般包括3个角度即:偏航角(Yaw)、俯仰角(Pitch)、翻滚角(Roll)。偏行角一般指无人机相对北极的顺时针角度,也即整个坐标系沿 z z z 轴顺时针旋转的角度,俯仰角即飞机的攻角或者飞机机头的俯仰角,在上面的坐标系中是沿 y y y 轴旋转的角度。翻滚角则是飞机左右倾斜的角度,在上面的坐标系中是沿 x x x 轴旋转的角度。
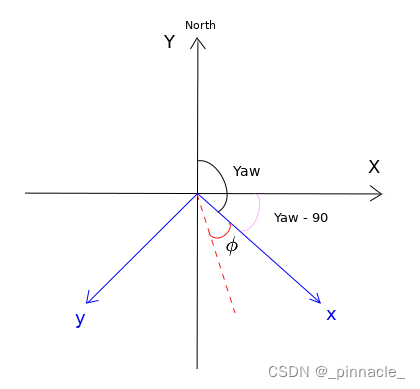
以上需要注意的是:偏航角与其他角不同,这里偏航角的旋转的角度是: Y a w − 90 Yaw-90 Yaw−90,如上图,是3维坐标系的俯视图,蓝色坐标系即是无人机载体坐标系NED,黑色坐标系即是大地坐标系。所以这里无人机载体的坐标系是相对于大地坐标系顺时针旋转了 Y a w − 90 Yaw-90 Yaw−90度。另一个需要注意的是:最后得到的相机水平 ϕ \phi ϕ 角度需要取反,即 − ϕ -\phi −ϕ;因为NED坐标系和大地坐标系中 y y y轴是对称的,如:上图可将蓝色 x x x轴转到 X X X轴上,这时俩坐标系 y y y轴是对称的,所以角度是相反的。三维空间的旋转矩阵
沿 x x x 轴的旋转
R x ( α ) = [ 1 0 0 0 c o s ( α ) − s i n ( α ) 0 s i n ( α ) c o s ( α ) ] R_x(\alpha)=
Rx(α)= 1000cos(α)sin(α)0−sin(α)cos(α) [ 1 0 0 0 c o s ( α ) − s i n ( α ) 0 s i n ( α ) c o s ( α ) ] 沿 y y y 轴的旋转
R y ( β ) = [ c o s ( β ) 0 s i n ( β ) 0 1 0 − s i n ( β ) 0 c o s ( β ) ] R_y(\beta)=
Ry(β)= cos(β)0−sin(β)010sin(β)0cos(β) [ c o s ( β ) 0 s i n ( β ) 0 1 0 − s i n ( β ) 0 c o s ( β ) ] 沿 z z z 轴的旋转
R z ( γ ) = [ c o s ( γ ) − s i n ( γ ) 0 s i n ( γ ) c o s ( γ ) 0 0 0 1 ] R_z(\gamma)=
Rz(γ)= cos(γ)sin(γ)0−sin(γ)cos(γ)0001 [ c o s ( γ ) − s i n ( γ ) 0 s i n ( γ ) c o s ( γ ) 0 0 0 1 ] 合并旋转后的三维旋转矩阵
R 3 d = R z ( γ ) R y ( β ) R x ( α ) R_{3d} = R_z(\gamma)R_y(\beta)R_x(\alpha) R3d=Rz(γ)Ry(β)Rx(α)
这里需要注意的是:1.旋转矩阵相乘的顺序,矩阵乘法不满足交换律,所以不同顺序一般最后得到的相机旋转角度不同(比较常用的顺序为 X Y Z XYZ XYZ 和 Z Y X ZYX ZYX,这个依赖于惯性测量单元(IMU)的姿态解算约定的旋转顺序 )。 2. 旋转方向,这里默认写的都是正向旋转。下面贴一下逆向的旋转矩阵作为参考:
沿 x x x 轴的逆向旋转
R x c ( α ) = [ 1 0 0 0 c o s ( α ) s i n ( α ) 0 − s i n ( α ) c o s ( α ) ] R_x^c(\alpha)=
Rxc(α)= 1000cos(α)−sin(α)0sin(α)cos(α) [ 1 0 0 0 c o s ( α ) s i n ( α ) 0 − s i n ( α ) c o s ( α ) ] 沿 y y y 轴的逆向旋转
R y c ( β ) = [ c o s ( β ) 0 − s i n ( β ) 0 1 0 s i n ( β ) 0 c o s ( β ) ] R_y^c(\beta)=
Ryc(β)= cos(β)0sin(β)010−sin(β)0cos(β) [ c o s ( β ) 0 − s i n ( β ) 0 1 0 s i n ( β ) 0 c o s ( β ) ] 沿 z z z 轴的逆向旋转
R z c ( γ ) = [ c o s ( γ ) s i n ( γ ) 0 − s i n ( γ ) c o s ( γ ) 0 0 0 1 ] R_z^c(\gamma)=
Rzc(γ)= cos(γ)−sin(γ)0sin(γ)cos(γ)0001 [ c o s ( γ ) s i n ( γ ) 0 − s i n ( γ ) c o s ( γ ) 0 0 0 1 ] 很显然 R x c ( α ) = R x ( − α ) R_x^c(\alpha) = R_x(-\alpha) Rxc(α)=Rx(−α),同理沿其他轴也是一样的,所以两种矩阵是形式等价的,只用一种就行了,注意旋转方向的正负。
代码实现
from math import * import numpy as np def rad(x): return radians(x) def deg(x): return degrees(x) def coord_sphere2cart(theta,phi, rho = 1): x = rho*sin(rad(theta))*cos(rad(phi)) y = rho*sin(rad(theta))*sin(rad(phi)) z = rho*cos(rad(theta)) return x,y,z def coord_cart2sphere(x,y,z): rho = sqrt(x**2+y**2+z**2) theta = acos(z/rho) phi = atan2(y,x) return rho,deg(theta),deg(phi) def uav_rot(x,y,z,RX,RY,RZ): R = rad(RX) #Roll-X P = rad(RY) #Pitch-Y Y = rad(RZ) #Yaw-Z Rx = [[1,0,0], [0,cos(R),-sin(R)], [0,sin(R),cos(R)]] Ry = [[cos(P),0,sin(P)], [0,1,0], [-sin(P),0,cos(P)]] Rz = [[cos(Y),-sin(Y),0], [sin(Y),cos(Y),0], [0,0,1]] Rx = np.array(Rx) Ry = np.array(Ry) Rz = np.array(Rz) R3d = Rz @ Ry @ Rx xyz = np.array([x,y,z]) return R3d @ xyz def camera_rectify(pan,tilt,yaw,pitch,roll): x,y,z = coord_sphere2cart(theta=tilt,phi=pan,rho=1) x_,y_,z_ = uav_rot(x,y,z,RX=roll,RY=pitch,RZ=yaw) rho,theta,phi = coord_cart2sphere(x_,y_,z_) pan = phi tilt = theta return pan,tilt def rot_mat_to_symbol(): from sympy import Symbol,Matrix,sin,cos R = Symbol("R") #Roll-X P = Symbol("P") #Pitch-Y Y = Symbol("Y") #Yaw-Z x = Symbol("x") y = Symbol("y") z = Symbol("z") xyz = Matrix([[x],[y],[z]]) Rx = Matrix([[1,0,0], [0,cos(R),-sin(R)], [0,sin(R),cos(R)] ]) Ry = Matrix([[cos(P),0,sin(P)], [0,1,0], [-sin(P),0,cos(P)], ]) Rz = Matrix([[cos(Y),-sin(Y),0], [sin(Y),cos(Y),0], [0,0,1] ]) res = Rz*Ry*Rx*xyz for a,m in zip(xyz,res): print(a,"=",m)- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
参考:
-
相关阅读:
RFID超高频终端深圳厂家 源头供应 提供SDK 支持二次开发
【快速上手系列】使用idea调百度AI接口实现内容审核(鉴黄)功能
微服务框架 SpringCloud微服务架构 8 Gateway 网关 8.7 网关的cors 跨域配置
Nacos 系统参数介绍
什么样的台灯适合学生使用?五款暑假必入护眼大路灯分享
「笔耕不辍」常见远程调用协议
【排序算法】冒泡、选择、插入排序算法比较
java-php-python-ssm校园旺角超市外卖平台计算机毕业设计
solidity开发讲解
Java Netty - Buffer类
- 原文地址:https://blog.csdn.net/u010165147/article/details/126892676
