-
C++11 - 7 - 线程库

前言:
Vue框架:从项目学Vue
OJ算法系列:神机百炼 - 算法详解
Linux操作系统:风后奇门 - linux回顾<pthread.h>:
- Linux中的线程:线程
创建线程:
- pthread_create():
#includevoid *func(void *args){ char* name = (char*)args; cout<<name<<pthread_self()<<endl; cout<<"线程任务函数"<<endl; } int main(){ pthread_t tid; if(pthread_create(&tid, nullptr, func, "linux线程 : ") < 0){ cout<<"线程创建失败"<<endl; } return 0; } - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
线程等待:
- pthread_join()线程等待:
#includevoid *func(void *args){ cout<<"线程任务函数"<<endl; } int main(){ pthread_t tid; pthread_create(&tid, nullptr, func, nullptr) < 0); pthread_join(tid, nullptr); return 0; } - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- pthread_detach()自动分离:
#includevoid *func(void *args){ pthread_detach(pthread_self()); cout<<"线程任务函数"<<endl; } int main(){ pthread_t tid; pthread_create(&tid, nullptr, func, nullptr) < 0); return 0; } - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
终止线程:
- 自然return:
#includevoid *func(void *args){ cout<<"线程任务函数"<<endl; //return (void*)&"0"; return (void*)"0"; } int main(){ pthread_t tid; pthread_create(&tid, nullptr, func, nullptr) < 0); void* exit_code; pthread_join(tid, &exit_code); cout<<*(int*)exit_code<<endl; return 0; } - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 结果:
不论是return “0” 还是 return &“0”
退出码都是48 - 自己pthread_exit():
#includevoid *func(void *args){ pthread_detach(pthread_self()); cout<<"线程任务函数"<<endl; int *p = new int(0); pthread_exit((void*)p); } int main(){ pthread_t tid; pthread_create(&tid, nullptr, func, nullptr) < 0); void* ret; pthread_join(func, &ret); cout<<*(int*)ret<<endl; return 0; } - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
-
他人pthread_cancel():
被cancel终止的线程,退出码都是常量PTHREAD_CANCELED
#includevoid *func(void *args){ pthread_detach(pthread_self()); while(1){ cout<<"线程任务函数"<<endl; sleep(1); } } int main(){ pthread_t tid; pthread_create(&tid, nullptr, func, nullptr) < 0); sleep(3); pthread_cancel(tid); void* ret; pthread_join(tid, &ret); cout<<*(int*)ret<<endl; if(*(int*)ret == PTHREAD_CANCELED){ printf("thread PTHREAD_CANCELED\n"); }else{ printf("thread isn't pthread_canceled\n"); } return 0; } - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
官方线程库:
-
虽然上述的 #include
我们在linux下使用的已经很熟练了 但是毕竟该库不是一个官方库,未自动添加到环境变量中
别忘了我们使用g++ / gcc编译时,总要携带命令行参数-lpthread
-
这个易忘问题终于在C++11得到了解决,官方线程库 #include < thread>来了
线程创建:
- 创建线程本质是创建一个thread类的对象:
#includethread t(可调用对象,可调用对象参数); - 1
- 2
- 可调用对象:
- 函数 / 函数指针
- 仿函数类对象
- lambda表达式
函数指针:
- 最基本的用法:
#include#include using namespace std; void func(int a, int b){ cout<<a <<" " <<b <<endl; } int main(){ thread t(func, 1, 2); return 0; } - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 运行报错:t1erminate called without an active exception
- 错因:子线程创建后,主线程未等待子线程运行完成,就终止了子线程
- 对策:加join()阻塞主线程:
#include#include using namespace std; void func(int a, int b){ cout<<a <<" " <<b <<endl; } int main(){ thread t(func, 1, 2); t.join(); return 0; } - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
仿函数类:
- 仿函数使用struct 或 class public均可:
#include#include using namespace std; struct Func{ void operator()(int a, double b){ cout<<a <<" " <<b <<endl; } }; int main(){ thread t(Func(), 1, 2); t.join(); return 0; } - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
lambda:
形参列表:
- 使用形参列表时,传参方式有两种:
- 传值
- 传指针
- 传引用 + ref()函数
- 对,没错,直接传引用会报错(visual studio13不报错,直接改为传值)
传值:
- lambda传值:发生了变量拷贝
#include#include using namespace std; int main(){ int x = 1, y = 2; thread t([](int a, int b){ cout<<a <<" " <<b <<endl; }, x, y); return 0; } - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
传指针:
- 传指针不加mutable也可以修改所指向变量值:
#include#include using namespace std; int main(){ int x = 1, y = 2; thread t([](int *a, int *b){ *a = 3; cout<<"子线程 :" <<*a <<" " <<*b <<endl; }, &x, &y); cout<<"主线程 :"<<x<<endl; return 0; } - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
-
运行结果:
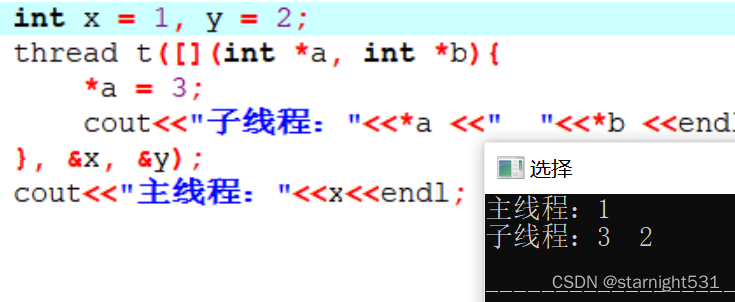
-
发现只有子线程中的变量发生值的变化,而主线程没有
难道开辟在主线程中的变量x y不被所有线程共享吗?
子线程重新在进程共享区开辟了变量空间,发生类似写实拷贝了吗?
-
继续看下面的代码:
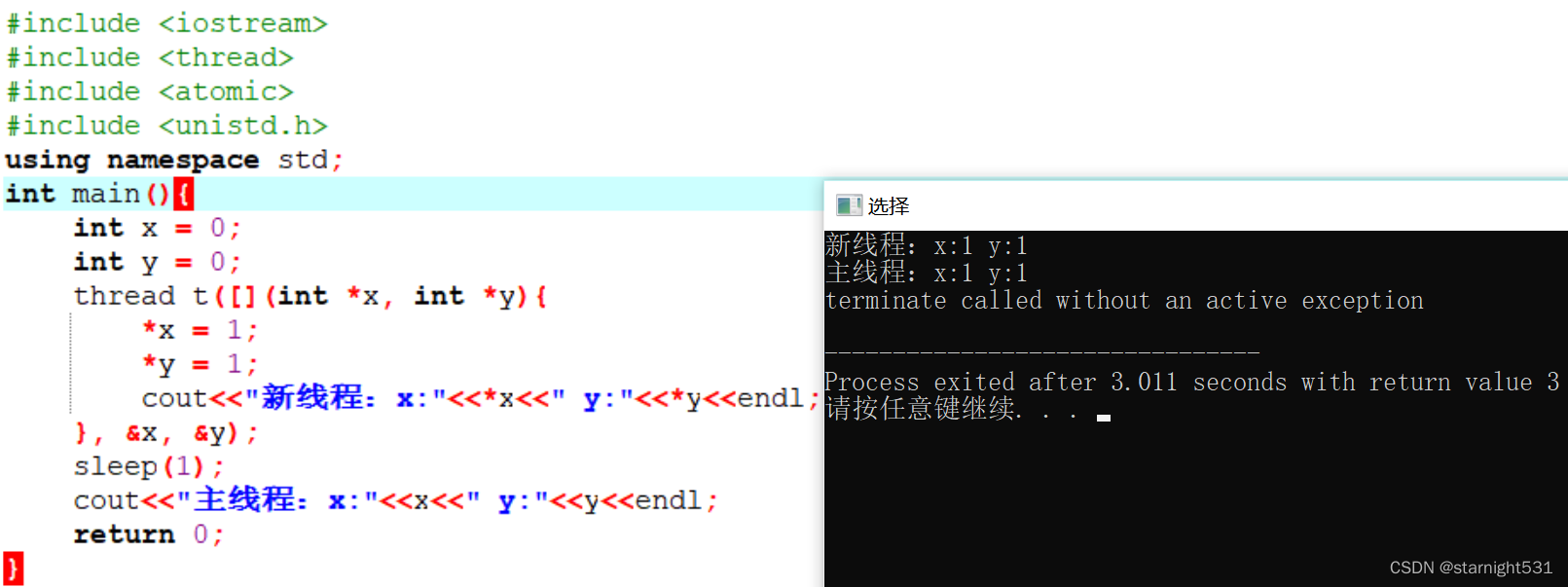
-
原来是主线程调度优先级总是比子线程高
导致子线程尚未修改变量,主线程已经打印完成
符合所有线程共享进程绝大部分内容
线程自己的局部变量以不同tid的结构体存储在进程地址空间的共享区
传左值引用 + ref():
-
大多数编译器直接传参左值引用会报错,
visual studio 13不会,但是会直接视为传值
-
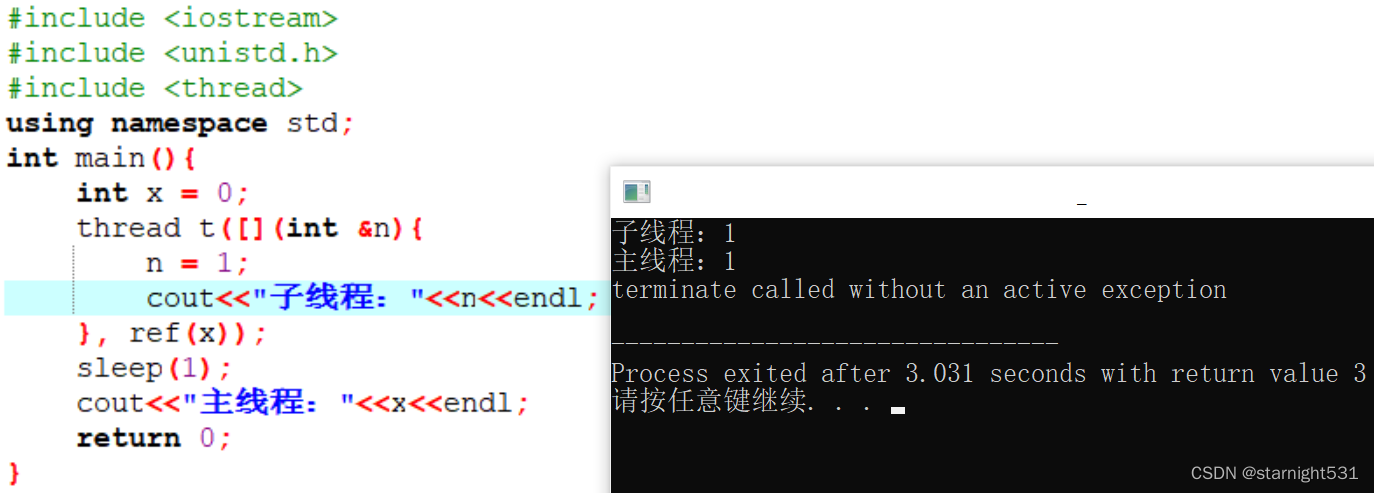
传左值引用 + ref()函数,可以实现多线程看到同一块内存:
#include#include #include using namespace std; int main(){ int x = 0; thread t([](int &n){ n = 1; cout<<"子线程:"<<n<<endl; }, ref(x)); sleep(1); cout<<"主线程:"<<x<<endl; return 0; } - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 运行结果:
捕捉列表:
- 有了捕捉列表,不必再传参了:
#include#include using namespace std; int main(){ int x = 0, y = 1; thread t([&](){ x = 2; cout<<"子线程:"<<x <<" "<<y<<endl; }); cout<<"主线程"<<x <<" "<<y <<endl; return 0; } - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 同样,由于进程调度优先级的问题,主线程优先在子线程修改xy值前将xy打印出来:
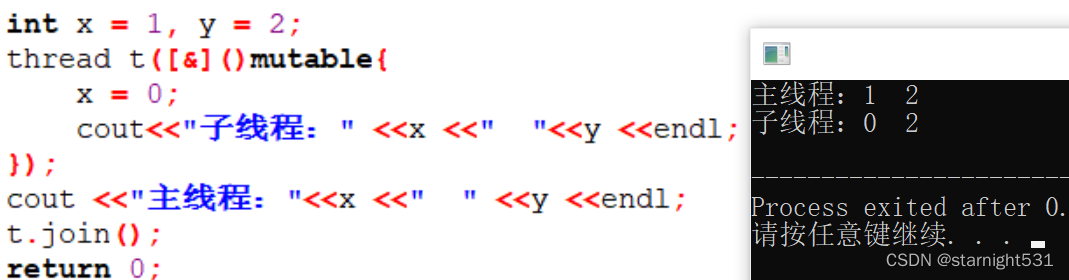
- 先让主线程休眠,等子线程修改完毕x y值后,主线程打印结果:
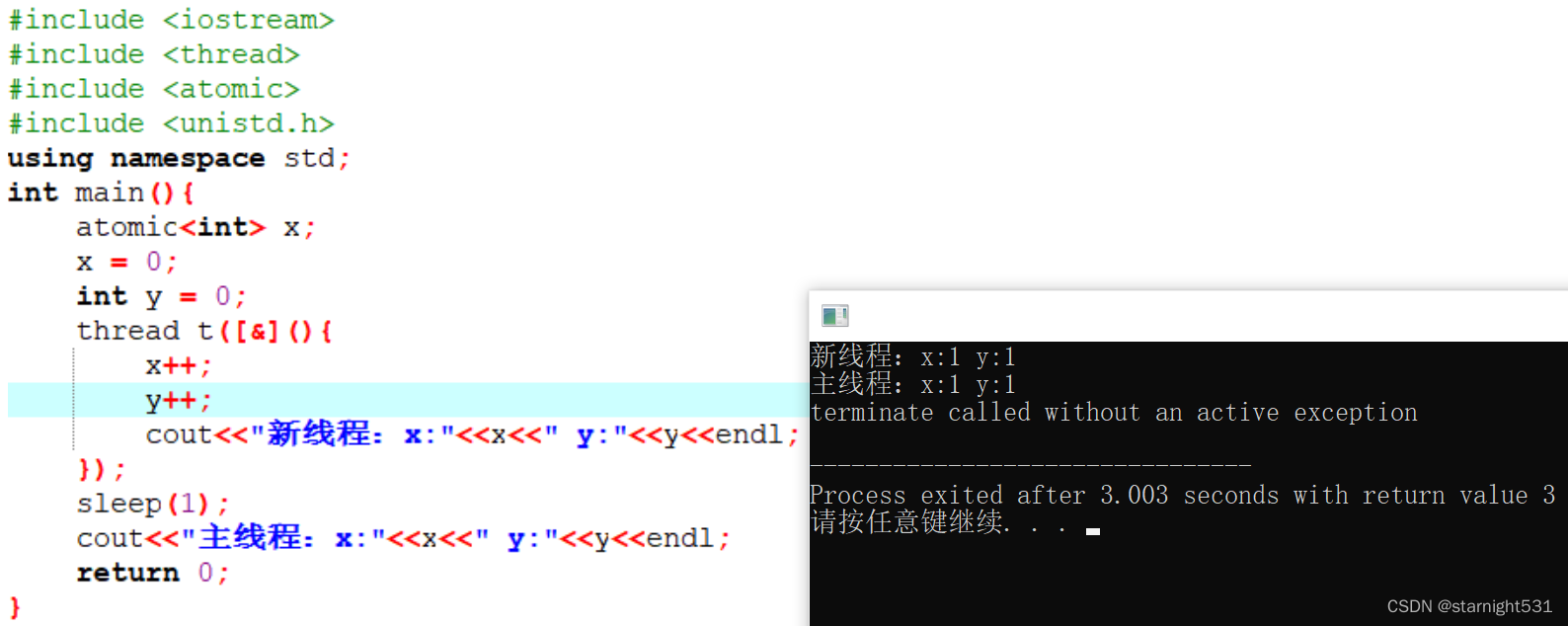
- 注意:atomic<>变量可以通过引用捕捉在lambda表达式使用,但是不能取地址后通过形参列表在lambda表达式使用
线程等待:
join等待:
-
thread 变量.join():
一行代码让主线程陷入等待,
若不加join(),主线程创建完子线程后,继续向下运行
遇到return时马上终止该进程及其内部所有线程
子线程可能尚未运行结束就被强迫终止
detach脱离:
- 进程脱离要求:
- 只有匿名线程可以脱离
- 由于< thread>中创建线程时,用户未记录其tid,
所以要声明一个线程脱离,只能在创建线程后马上声明 - 子线程运行时,要让主线程阻塞,不能释放进程资源,终止所有线程
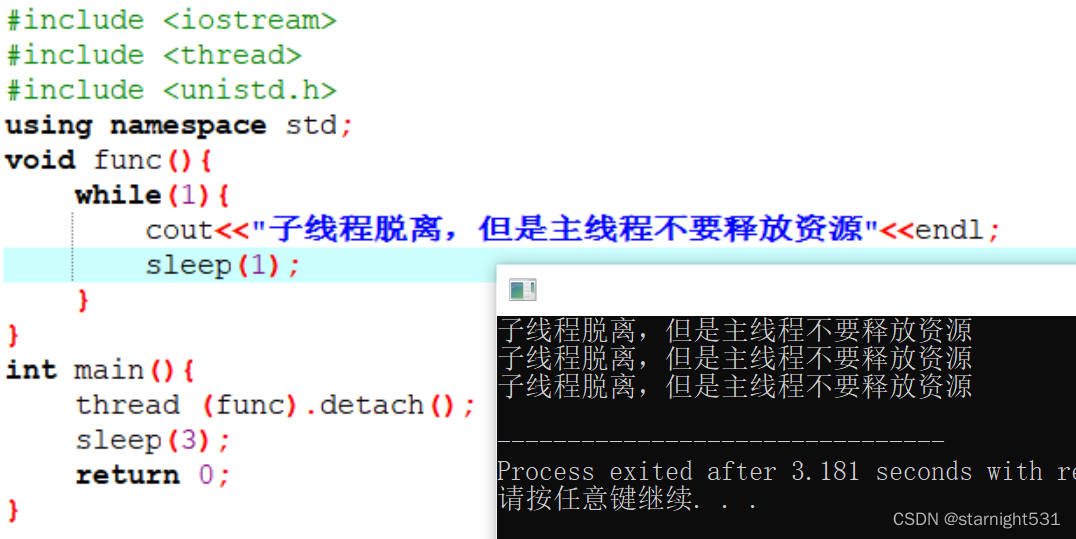
- detach():
#include#include #include using namespace std; void func(){ while(1){ cout<<"子线程脱离,但是主线程不要释放资源"<<endl; sleep(1); } } int main(){ thread (func).detach(); sleep(3); return 0; } - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 运行效果:
线程列表:
- 我们在Linux专栏下写过ThreadPool类:线程池
- 下面我们先不实现可以添加任务的线程池类,先看看< thread>下的线程列表:
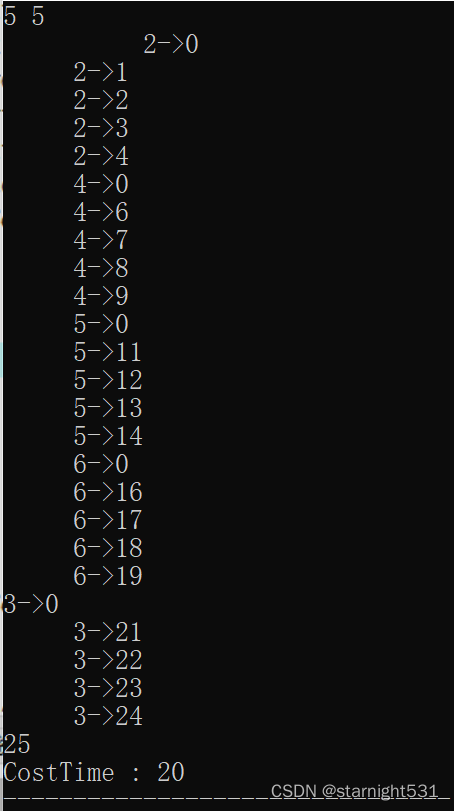
- 创建n个线程,每个线程为原子变量x循环加1,加到M:
#include#include #include #include using namespace std; int main(){ int N, M; cin >>N >>M; atomic<int> x; //原子变量可视为自带锁的变量 x = 0; //原子变量不能初始化构造,但是可以赋值拷贝构造 vector<thread> vthds; vthds.resize(N); atomic<int> costTime; costTime = 0; for(int i=0; i<vthds.size(); i++){ vthds[i] = thread([M, &x, &costTime]{ int begin = clock(); for(int i=0; i<M; i++){ cout<<this_thread::get_id()<<"->"<<x<<endl; x++; } int end = clock(); costTime += (end - begin); }); } for(auto &e: vthds){ e.join(); } cout<<x<<endl; cout<<"CostTime : "<<costTime; return 0; } - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 运行结果:5个线程每个线程为x加5,耗时44ms
mutex锁:
用法:
回顾Linux:
- Linux下的mutex属于< pthread.h>:
#includepthread_mutex_t mutex; int main(){ //动态初始化: pthread_mutex_init(&mutex, nullptr); //加锁: pthread_mutex_lock(&mutex); //解锁: pthread_mutex_unlock(&mutex); //销毁锁: pthread_mutex_destory(&mutex); } - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
< mutex>中:
- C++11对mutex的用法有所化简:
#include//创建锁: mutex mtx; //加锁: mtx.lock(); //解锁: mtx.unlock(); //不必销毁锁: - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
加锁位置:
分析:
- 分析下面这段代码中锁应该加在位置1还是位置2:
#include#include #include using namespace std; int x = 0; mutex mtx; int N = 10000000; void func(){ //加锁位置2:mtx.lock() for(int i=0; i<N; i++){ //加锁位置1:mtx.lock() ++x; //解锁位置1:mtx.unlock() } //解锁位置2:mtx.unlock() } int main(){ thread t1(func); thread t2(func); return 0; } - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
-
位置1的效果:
每次进程调度中存在多次循环
每次循环都申请释放一次锁
每次申请释放锁的主要任务只是+1
-
位置2的效果:
每次进程调度中存在多次循环
所有循环只申请释放一次锁
每次申请释放锁的主要任务是重复几万次+1
-
显然,位置2的速度更快,资源消耗更少,且同样保证了线程安全
结论:
互斥锁的加锁位置:
-
当业务代码比较简单,执行速度块,执行时间短时:
将锁加在循环外,避免循环内部不断申请释放锁的资源浪费
-
当业务代码比较复杂,执行速度慢,执行时间长时:
将锁加载循环内,一方面一次线程调度内可能完不成一次业务代码
另一方面申请释放锁的消耗相对业务代码的消耗来说可以忽略了
自旋锁的加锁位置:
- 自旋锁不存在不断申请释放锁造成的资源消耗
- 单纯的循环访问对资源消耗不大,所以加锁位置问题可以忽略
-
相关阅读:
[附源码]java毕业设计个人事务管理系统
数据结构 | (一)包装类和初始泛型
vue3错误排查-POST请求的body参数 传参方式form-data和json
含分布式电源的配电网可靠性评估(matlab代码)
Digicert证书:您的网络安全守护神
基于Java+MySQL的学生成绩管理系统
vue3中setup的两个参数 props,context (attrs,emit,slots),vue3中的双向数据绑定自定义事件emit和v-model
一个方法解决nSum 问题
centos安装TDengine
Apache RocketMQ
- 原文地址:https://blog.csdn.net/buptsd/article/details/126895854
