-
PX4模块设计之四十:FrskyTelemetry模块
PX4模块设计之四十:FrskyTelemetry模块
1. FrskyTelemetry模块简介
FrSky Telemetry support. Auto-detects D or S.PORT protocol. frsky_telemetry[arguments...] Commands: start [-d ] Select Serial Device values: ] Scanning timeout [s] (default: no timeout) default: 0 [-m ] Select protocol (default: auto-detect) values: sport|sport_single|sport_single_invert|dtype, default: auto stop status - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
注1:usage函数是具体对应实现。
注2:FrskyTelemetry模块采用了纯C语言代码实现。2. 模块入口函数
2.1 主入口frsky_telemetry_main
模块仅支持start/stop/status命令,不支持其他自定义命令。
frsky_telemetry_main ├──>│ ├──> PX4_ERR("missing command") │ ├──> usage() │ └──> return -1 ├──> │ ├──> │ │ ├──> PX4_INFO("frsky_telemetry already running") │ │ └──> return 0 │ ├──> thread_should_exit = false │ ├──> frsky_task = px4_task_spawn_cmd("frsky_telemetry",SCHED_DEFAULT,SCHED_PRIORITY_DEFAULT + 4,1400,frsky_telemetry_thread_main,(char *const *)argv) │ ├──> │ │ └──> usleep(200) │ └──> return 0 ├──> │ ├──> │ │ ├──> PX4_WARN("frsky_telemetry already stopped") │ │ └──> return 0 │ ├──> thread_should_exit = true │ ├──> │ │ ├──> usleep(1000000) │ │ └──> PX4_INFO(".") │ ├──> PX4_INFO("terminated.") │ ├──> device_name = NULL │ └──> return 0 ├──> │ ├──> │ │ ├──> PX4_INFO("running: SCANNING") │ │ ├──> PX4_INFO("port: %s", device_name) │ │ └──> break │ ├──> │ │ ├──> PX4_INFO("running: SPORT") │ │ ├──> PX4_INFO("port: %s", device_name) │ │ ├──> PX4_INFO("packets sent: %ld", sentPackets) │ │ └──> break │ ├──> │ │ ├──> PX4_INFO("running: SPORT (single wire)") │ │ ├──> PX4_INFO("port: %s", device_name) │ │ ├──> PX4_INFO("packets sent: %ld", sentPackets) │ │ └──> break │ ├──> │ │ ├──> PX4_INFO("running: SPORT (single wire, inverted)") │ │ ├──> PX4_INFO("port: %s", device_name) │ │ ├──> PX4_INFO("packets sent: %ld", sentPackets) │ │ └──> break │ ├──> │ │ ├──> PX4_INFO("running: DTYPE") │ │ ├──> PX4_INFO("port: %s", device_name) │ │ ├──> PX4_INFO("packets sent: %ld", sentPackets) │ │ └──> break │ └──> return 0 ├──> - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
2.2 自定义子命令custom_command
注:该模块采用了纯C语言代码实现,在main函数中直接执行命令,无需ModuleBase的custom_command重载实现。
2.3 模块状态print_status【重载】
注:该模块采用了纯C语言代码实现,在main函数中直接执行usage函数,无需ModuleBase的模块状态print_status重载实现。
3. FrskyTelemetry模块重要函数
3.1 task_spawn/instantiate/Run
注:该模块采用了纯C语言代码实现,无需ModuleBase的模块状态task_spawn/instantiate/Run重载实现。
3.2 frsky_telemetry_thread_main
这个是FrskyTelemetry模块任务入口函数,在任务内部会循环执行,直到条件不满足才退出循环任务。
frsky_telemetry_thread_main ├──> device_name = "/dev/ttyS6" /* default USART8 */ ├──> [frsky状态机及变量初始化] ├──> [frsky telemetry参数解析] │ ├──>│ │ ├──> device_name = myoptarg │ │ └──> break │ ├──> │ │ ├──> scanning_timeout_ms = strtoul(myoptarg, nullptr, 10) * 1000 │ │ └──> break │ ├──> │ │ ├──> │ │ │ └──> frsky_state = baudRate = SPORT │ │ ├──> │ │ │ └──> frsky_state = baudRate = SPORT_SINGLE_WIRE │ │ ├──> │ │ │ └──> frsky_state = baudRate = SPORT_SINGLE_WIRE_INVERT │ │ ├──> │ │ │ └──> frsky_state = baudRate = DTYPE │ │ ├──> │ │ │ └──> frsky_state = baudRate = DTYPE │ │ ├──> < else > │ │ │ ├──> usage() │ │ │ └──> return -1 │ │ └──> break │ └──> │ ├──> device_name = NULL │ └──> return -1 ├──> [poll descriptor] │ ├──> struct pollfd fds[1] │ ├──> fds[0].fd = uart │ └──> fds[0].events = POLLIN ├──> thread_running = true ├──> [Auto Detect FrSky (D8 mode, DTYPE) or SmartPort (D16 mode, SPORT/SPORT_SINGLE_WIRE/SPORT_SINGLE_WIRE_INVERT)] ├──> │ ├──> [UART Initialization] │ ├──> [sPort Topic subscribe] │ ├──> // send S.port telemetry │ │ ├──> [Wait bus master to put 0x7E flag] │ │ ├──> [Read ID flag for pulling] │ │ ├──> sPort_update_topics // update subscribed topic │ │ └──> │ │ ├──> 1000> //report BATV at 1Hz │ │ │ ├──> lastBATV_ms = now_ms │ │ │ └──> sPort_send_BATV(uart) //send battery voltage │ │ ├──> 200> //report battery current at 5Hz │ │ │ ├──> lastCUR_ms = now_ms │ │ │ └──> sPort_send_CUR(uart) //send battery current │ │ ├──> 200> //report altitude at 5Hz │ │ │ ├──> lastALT_ms = now_ms │ │ │ └──> sPort_send_ALT(uart) //send altitude │ │ ├──> 200> //report speed at 5Hz │ │ │ ├──> lastSPD_ms = now_ms │ │ │ └──> sPort_send_SPD(uart) //send speed │ │ ├──> 1000> //report fuel at 1Hz │ │ │ ├──> lastFUEL_ms = now_ms │ │ │ └──> sPort_send_FUEL(uart) //send fuel │ │ ├──> 100> //report vertical speed at 10Hz │ │ │ ├──> uint32_t dt = now_ms - lastVSPD_ms │ │ │ ├──> float speed = (filtered_alt - last_baro_alt) / (1e-3f * (float)dt) //estimate vertical speed using first difference and delta t │ │ │ ├──> last_baro_alt = filtered_alt //save current alt and timestamp │ │ │ ├──> lastVSPD_ms = now_ms │ │ │ └──> sPort_send_VSPD(uart, speed) │ │ ├──> 100> //report GPS data elements at 5*5Hz │ │ │ ├──> :sPort_send_GPS_LON(uart) │ │ │ ├──> :sPort_send_GPS_LAT(uart) │ │ │ ├──> :sPort_send_GPS_CRS(uart) │ │ │ ├──> :sPort_send_GPS_ALT(uart) │ │ │ ├──> :sPort_send_GPS_SPD(uart) │ │ │ └──> :sPort_send_GPS_TIME(uart) │ │ ├──> │ │ │ ├──> 500> // report nav_state as DIY_NAVSTATE 2Hz │ │ │ │ ├──> lastNAV_STATE_ms = now_ms │ │ │ │ └──> sPort_send_NAV_STATE(uart) // send T1 │ │ │ └──> 500> //report satcount and fix as DIY_GPSFIX at 2Hz │ │ │ ├──> lastGPS_FIX_ms = now_ms │ │ │ └──> sPort_send_GPS_FIX(uart) // send T2 │ │ └──> │ │ ├──> │ │ │ └──> sPort_send_flight_mode(uart) │ │ └──> default: │ │ └──> sPort_send_GPS_info(uart) │ ├──> PX4_DEBUG("freeing sPort memory") │ └──> sPort_deinit() ├──> │ ├──> [detected D type telemetry: reconfigure UART] │ ├──> [frsky_init() Topic subscribe] │ ├──> //send D8 mode telemetry │ │ ├──> [frsky_parse_host, parse incoming data] │ │ ├──> frsky_update_topics // update subscribed topic │ │ ├──> │ │ ├──> device_name = myoptarg; │ │ └──> break; │ ├──> │ │ ├──> scanning_timeout_ms = strtoul(myoptarg, nullptr, 10) * 1000; │ │ └──> break; │ ├──> │ │ ├──> │ │ │ └──> frsky_state = baudRate = SPORT; │ │ ├──> │ │ │ └──> frsky_state = baudRate = SPORT_SINGLE_WIRE; │ │ ├──> │ │ │ └──> frsky_state = baudRate = SPORT_SINGLE_WIRE_INVERT; │ │ ├──> │ │ │ └──> frsky_state = baudRate = DTYPE; │ │ ├──> │ │ │ └──> frsky_state = baudRate = DTYPE; │ │ ├──> < else > │ │ │ ├──> usage(); │ │ │ └──> return -1; │ │ └──> break; │ └──> │ ├──> device_name = NULL; │ └──> return -1; ├──> [poll descriptor] │ ├──> struct pollfd fds[1]; │ ├──> fds[0].fd = uart; │ └──> fds[0].events = POLLIN; ├──> thread_running = true; ├──> [Auto Detect FrSky (D8 mode, DTYPE) or SmartPort (D16 mode, SPORT/SPORT_SINGLE_WIRE/SPORT_SINGLE_WIRE_INVERT)] ├──> │ ├──> [UART Initialization] │ ├──> [sPort Topic subscribe] │ ├──> // send S.port telemetry │ │ ├──> [Wait bus master to put 0x7E flag] │ │ ├──> [Read ID flag for pulling] │ │ ├──> sPort_update_topics // update subscribed topic │ │ └──> │ │ ├──> 1000> //report BATV at 1Hz │ │ │ ├──> lastBATV_ms = now_ms; │ │ │ └──> sPort_send_BATV(uart); //send battery voltage │ │ ├──> 200> //report battery current at 5Hz │ │ │ ├──> lastCUR_ms = now_ms; │ │ │ └──> sPort_send_CUR(uart); //send battery current │ │ ├──> 200> //report altitude at 5Hz │ │ │ ├──> lastALT_ms = now_ms; │ │ │ └──> sPort_send_ALT(uart); //send altitude │ │ ├──> 200> //report speed at 5Hz │ │ │ ├──> lastSPD_ms = now_ms; │ │ │ └──> sPort_send_SPD(uart); //send speed │ │ ├──> 1000> //report fuel at 1Hz │ │ │ ├──> lastFUEL_ms = now_ms; │ │ │ └──> sPort_send_FUEL(uart); //send fuel │ │ ├──> 100> //report vertical speed at 10Hz │ │ │ ├──> uint32_t dt = now_ms - lastVSPD_ms; │ │ │ ├──> float speed = (filtered_alt - last_baro_alt) / (1e-3f * (float)dt); //estimate vertical speed using first difference and delta t │ │ │ ├──> last_baro_alt = filtered_alt; //save current alt and timestamp │ │ │ ├──> lastVSPD_ms = now_ms; │ │ │ └──> sPort_send_VSPD(uart, speed); │ │ ├──> 100> //report GPS data elements at 5*5Hz │ │ │ ├──> :sPort_send_GPS_LON(uart); │ │ │ ├──> :sPort_send_GPS_LAT(uart); │ │ │ ├──> :sPort_send_GPS_CRS(uart); │ │ │ ├──> :sPort_send_GPS_ALT(uart); │ │ │ ├──> :sPort_send_GPS_SPD(uart); │ │ │ └──> :sPort_send_GPS_TIME(uart); │ │ ├──> │ │ │ ├──> 500> // report nav_state as DIY_NAVSTATE 2Hz │ │ │ │ ├──> lastNAV_STATE_ms = now_ms; │ │ │ │ └──> sPort_send_NAV_STATE(uart); // send T1 │ │ │ └──> 500> //report satcount and fix as DIY_GPSFIX at 2Hz │ │ │ ├──> lastGPS_FIX_ms = now_ms; │ │ │ └──> sPort_send_GPS_FIX(uart); // send T2 │ │ └──> │ │ ├──> │ │ │ └──> sPort_send_flight_mode(uart); │ │ └──> default: │ │ └──> sPort_send_GPS_info(uart); │ ├──> PX4_DEBUG("freeing sPort memory"); │ └──> sPort_deinit(); ├──> │ ├──> [detected D type telemetry: reconfigure UART] │ ├──> [frsky_init() Topic subscribe] │ ├──> //send D8 mode telemetry │ │ ├──> [frsky_parse_host, parse incoming data] │ │ ├──> frsky_update_topics // update subscribed topic │ │ ├──> - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
4. 总结
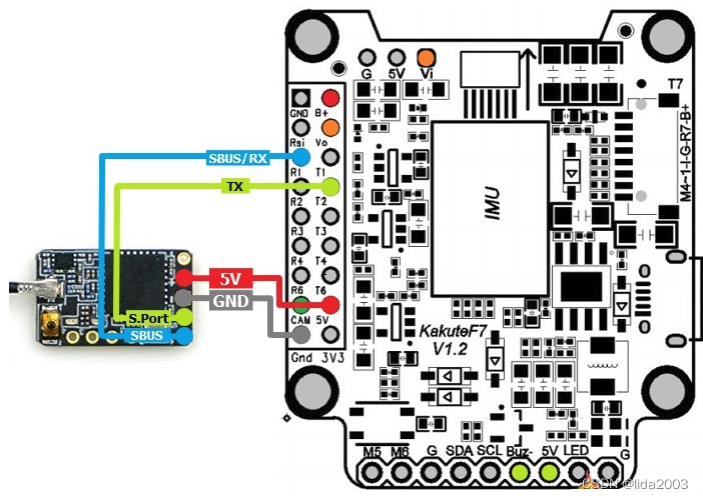
1. FrSky硬件连接图,如下所示
2. 从模块代码角度,输入输出项如下所示
- 输入
uORB::SubscriptionDatabattery_status_sub{ORB_ID(battery_status)}; uORB::SubscriptionData vehicle_acceleration_sub{ORB_ID(vehicle_acceleration)}; uORB::SubscriptionData vehicle_air_data_sub{ORB_ID(vehicle_air_data)}; uORB::SubscriptionData vehicle_local_position_sub{ORB_ID(vehicle_local_position)}; uORB::SubscriptionData vehicle_global_position_sub{ORB_ID(vehicle_global_position)}; uORB::SubscriptionData vehicle_gps_position_sub{ORB_ID(vehicle_gps_position)}; uORB::SubscriptionData vehicle_status_sub{ORB_ID(vehicle_status)}; - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 输出
通过串行口输出到Rx模块,最终到遥控Tx模块。
void sPort_send_data(int uart, uint16_t id, uint32_t data)- 1
3. 具体逻辑业务就是期望将飞控上的数据展示到遥控器上,如下图所示

5. 参考资料
【1】PX4开源软件框架简明简介
【2】PX4模块设计之十一:Built-In框架
【3】PX4模块设计之十二:High Resolution Timer设计
【4】PX4模块设计之十三:WorkQueue设计
【5】PX4模块设计之十七:ModuleBase模块
【6】PX4模块设计之三十:Hysteresis类
【7】PX4 modules_main
【8】frsky-protocols-made-simple -
相关阅读:
打印字符串,数组,对象,函数的原型方法
React源码解读之更新的创建
PHP Json_encode() 空数组时,返回 [] 与 {} 的问题
Flare Network,跨越互操作性三难困境
google浏览器安装vuejs-devtools插件2022年安装记录
Docker (六)【Docker Compose】
esp-01刷固件/下载软件到内部单片机的方法
算法题:买卖股票的最佳时机 II (贪心算法解决股票问题)
JavaScript框架的四个时代
K8S原来如此简单(四)Service+Ingress
- 原文地址:https://blog.csdn.net/lida2003/article/details/126869090
