-
25分钟详细解说c++搜索算法
🔥深度优先搜索
了解原理
以深度为优先的搜索算法,可以理解为一条路走到黑
图例解释
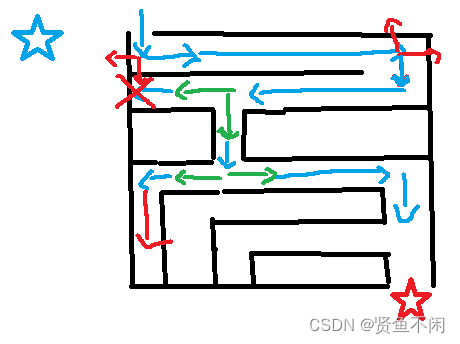
==现在需要从蓝色五角星走到红色五角星
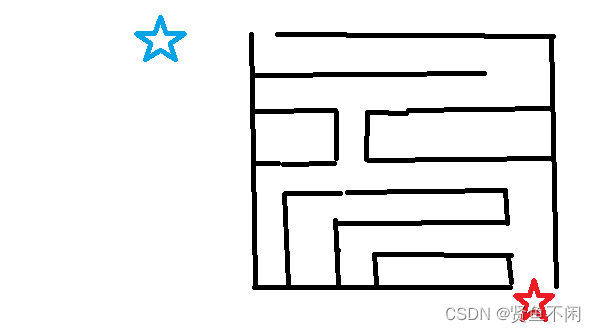
理想走法:
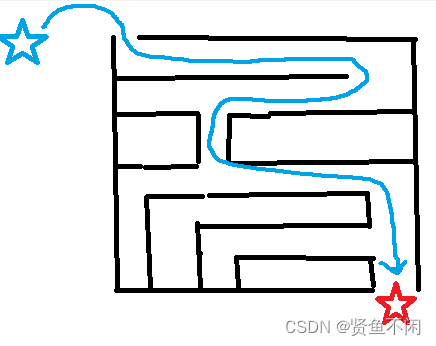
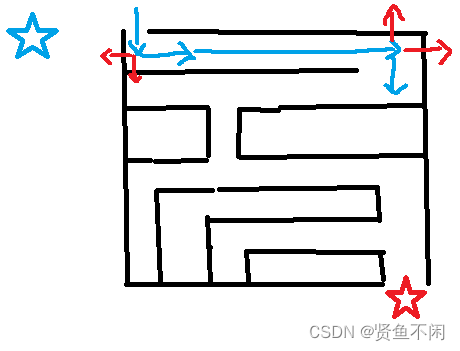
很明显,这里直走到头已经走不了了,才会从之前的岔路拐弯(一路走到黑)
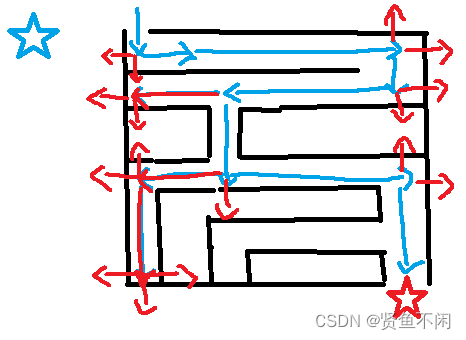
这就是深度搜索走迷宫的全过程,当然,深度优先搜索不只是光能走迷宫,其他的例题后面会讲方向数组
一般会定义两个数组
int dx[5]={0,1,-1,0,0} int dy[5]={0,0,0,1,-1}- 1
- 2
这里我一般喜欢让数组下标从1开始,所以第一个0只是顶替个位置
for(int i=1;i<=4;i++){ int tx=dx[i]+x; int ty=dy[i]+y; }- 1
- 2
- 3
- 4
这里xy是原来的坐标,txty是走后的坐标,一般题目要求是上下左右四个方向走,如果要求斜方向也可以走方向数组会有些变化
int dx[8]={0,1,-1,0,0,1,-1,-1,1} int dy[8]={0,0,0,1,-1,1,-1,1,-1}- 1
- 2
函数
函数的类型在本章需要的主要有两种:
int类型和void类型
前者有返回值,可以处理各种类型的题目,后者没有返回值,常用于走迷宫一类的题。递归
还是看上方的图,只有走到死路的时候会往前走其他的路,这个过程就是递归的过程
🍀套用模板
void dfs(int x,int y){ if(x==xx&&y==yy)//到终点了 return;//void类型返回值为空 for(int i=1;i<=4;i++){ int tx=dx[i]+x; int ty=dy[i]+y; if() continue//这里判断有没有出界,有没有走过,有没有碰到墙之类的 //如果没有就继续 vis[tx][ty]=1//记录一下走没走过,避免重复走,如果不记录会死循环,上下上下不停地走 dfs(tx,ty); } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
🔥广度优先搜索
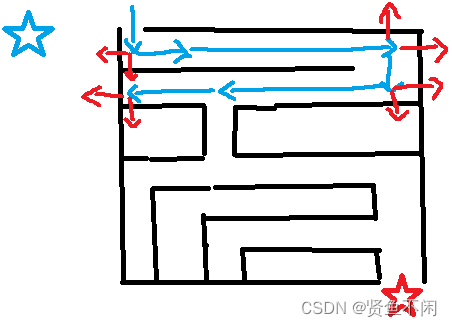
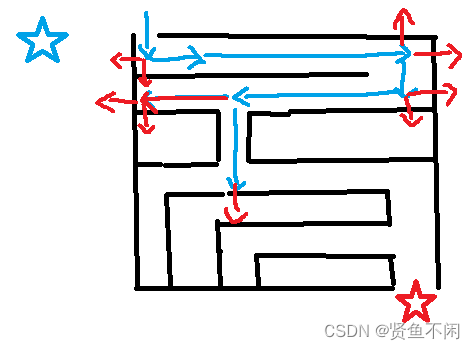
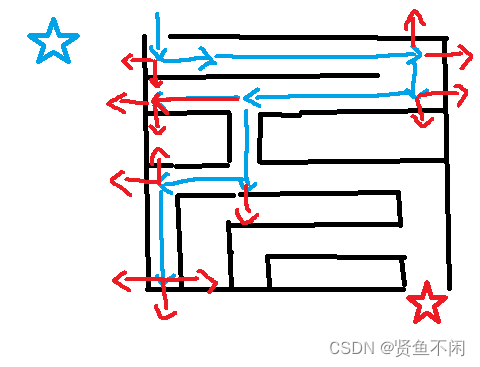
以广度为优先的搜索,可以理解为在每一步的时候处理所有的可能性
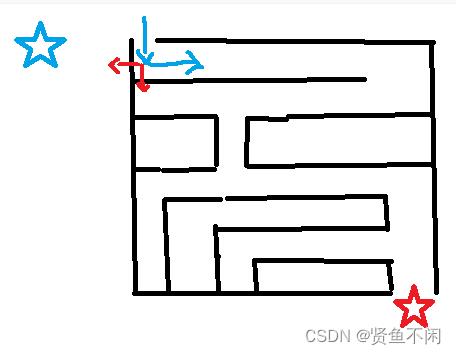
还是来看看图:
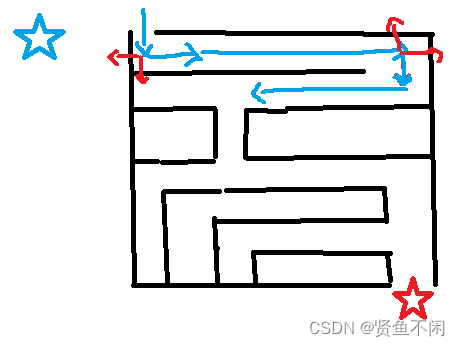
可以看到这里遇到了岔路
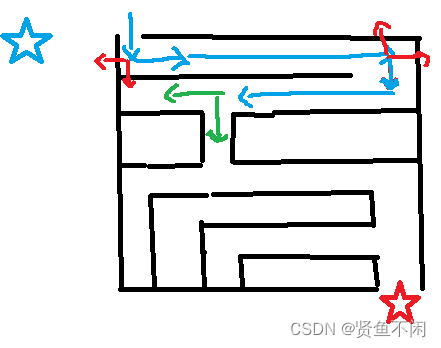
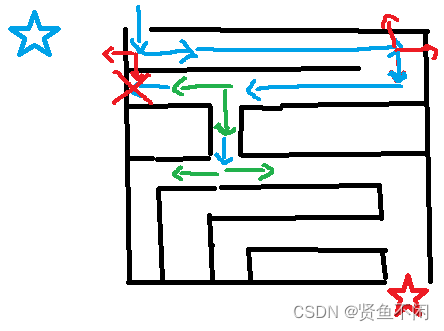
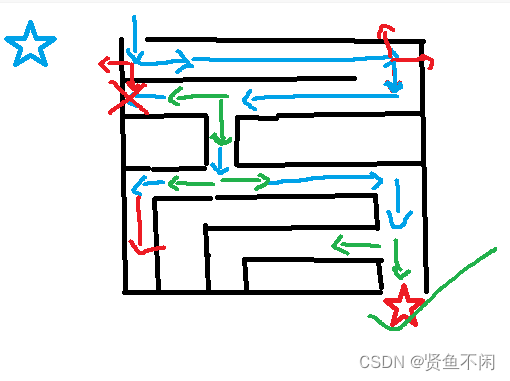
我们在这里同时处理了解原理
队列
特点 先进先出:可以理解为一个联通的钢管,先放进去的部分先掉下来
手打队列
void bfs(){ head=0;tail=1;//这里是记录头和尾的坐标,如果t加1,也就是入队的过程,如果h加1,就是出队的过程 qw[0][0]=1; a[tail]=0,b[tail]=0; while(tail!=head){ head++; for(int i=1;i<=4;i++){//下面部分基本一样 int tx=a[head]+dx[i]; int ty=b[head]+dy[i]; if() continue; tail++; a[tail]=tx;//这里入队并且记录数据 b[tail]=ty; qw[tx][ty]=1;//避免走重复,和上文一样,避免死循环,不过广搜不是很影响 if(到终点){ return; } } } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
queue
struct aaa{ int x,y; };//记录一下结构体,具体下面有介绍- 1
- 2
- 3
void bfs(){ vis[x][y]=1; dis[x][y]=0; queue <aaa> q;//aaa是结构体的类型,这句话的意思是定义一个类型为aaa的队列 q.push((aaa){x,y});//入队的意思,第一个括号写类型,因为结构体是aaa类型,xy是int类型,后面是入队数据 while(!q.empty()){//这句话的意思是当队列不为空(empty是为空的意思,!取反) aaa a;//定义一个aaa类型的变量a a=q.front();//这个意思是取出队首元素,也就是队列中最先进去的 q.pop();//取出队首元素后出队,将已经取出的元素扔掉 for(int i=1;i<=4;i++){ int tx=a.x+dx[i]; int ty=a.y+dy[i]; if() continue; q.push((aaa){tx,ty});//入队的意思,和上文h,t作用一样 vis[tx][ty]=1;//记录路径,避免重复 if(到终点){ return; } } } return ; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
结构体
struct aaa{ int x,y; }; aaa a;//定义一个aaa类型的a a.x; a.y;这样可以方便记录数据 a[i],b[i];当然,这样子记录xy坐标也是可以的,但是有些麻烦- 1
- 2
- 3
- 4
- 5
- 6
- 7
🍀套用模板
void bfs(){ 入队 while(队列不为空){ 取出队首元素 出队 for(1 to 4){ 和上文深搜走迷宫一样 如果可以走{ 入队元素 } 如果到终点{ return; } } } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
🏆结束语 搜索不光可以走迷宫,其他具体的题目题解可以看到专栏内容

-
相关阅读:
1-k8s1.23.6-底座搭建-基于docker
OkHttp网络框架深入理解-SSL握手与加密
JAVA反编译工具:JADX-GUI、
C#(三十)之C#comboBox ListView treeView
HashMap 为什么线程不安全?
Linux安装配置awscli命令行接口工具及其从aws上传下载数据
Maven的安装与配置与使用
WWW::Mechanize库使用HTTP如何做爬虫?
一口气拿下vue-router所有知识点,薪资暴涨3000
小知识点记录
- 原文地址:https://blog.csdn.net/m0_66623111/article/details/126850509