-
【基于FreeRTOS的STM32F103系统】编写FreeRTOS程序
系列文章目录
【基于FreeRTOS的STM32F103系统】简介及官方文件移植
【基于FreeRTOS的STM32F103系统】编写FreeRTOS程序
【基于FreeRTOS的STM32F103系统】内存管理及任务调度
【基于FreeRTOS的STM32F103系统】Heap_4内存管理机制程序详解
【基于FreeRTOS的STM32F103系统】移动底盘程序优化
前言
前面简单介绍了FreeRTOS和如何将它简单的移植到STM32F1上,这篇介绍移植完成后,我们如何创建任务,并利用FreeRTOS的多任务机制优化我们的程序。
一、创建任务
创建任务时使用的函数如下:
- BaseType_t xTaskCreate( TaskFunction_t pxTaskCode, //函数指针,任务函数
- const char * const pcName, //任务的名字
- const configSTACK_DEPTH_TYPE usStackDepth,//栈大小,单位为word,10表示40字节
- void * const pvParameters, //调用任务函数时传入的参数
- UBaseType_t uxPriority, //优先级
- TaskHandle_t * const pxCreatedTask );//任务句柄,以后使用它来操作这个任务
参数说明:
- pvTaskCode:函数指针,可以简单地认为任务就是一个C函数。它稍微特殊一点:永远不退出,或者退出时要调用"vTaskDelete(NULL)"
- pcName:任务的名字,FreeRTOS内部不使用它,仅仅起调试作用。长度为:confifigMAX_TASK_NAME_LEN
- usStackDepth:每个任务都有自己的栈,这里指定栈大小。
单位是 word ,比如传入 100 ,表示栈大小为 100 word ,也就是 400 字节。最大值为 uint16_t 的最大值。怎么确定栈的大小,并不容易,很多时候是估计。精确的办法是看反汇编码。
-
pvParameters:传入参数,调用 pvTaskCode 函数指针时用到: pvTaskCode(pvParameters)
- uxPriorit:优先级范围:0~(confifigMAX_PRIORITIES – 1) 数值越小优先级越低, 如果传入过大的值,xTaskCreate会把它调整为(confifigMAX_PRIORITIES – 1)
-
pxCreatedTask: 用来保存 xTaskCreate 的输出结果: task handle 。 以后如果想操作这个任务,比如修改它的优先级,就需要这个 handle 。 如果不想使用该 handle ,可以传入 NULL 。
-
返回值:
成功: pdPASS ;失败: errCOULD_NOT_ALLOCATE_REQUIRED_MEMORY( 失败原因只有内存不足 )注意:文档里都说失败时返回值是 pdFAIL ,这不对。pdFAIL 是 0 , errCOULD_NOT_ALLOCATE_REQUIRED_MEMORY 是 -1 。
实例:
- void Task1Function(void * param)
- {
- while (1)
- {
- printf("1");
- }
- }
- void Task2Function(void * param)
- {
- while (1)
- {
- printf("2");
- }
- }
- xTaskCreate(Task1Function, "Task1", 100, NULL, 1, &xHandleTask1);
- xTaskCreate(Task2Function, "Task2", 100, NULL, 1, NULL);
开启任务调度:
vTaskStartScheduler(); //开启任务调度结果:

二、删除任务
删除任务使用的函数如下:
void vTaskDelete( TaskHandle_t xTaskToDelete );参数说明:
-
xTaskToDelete:任务句柄,使用 xTaskCreate 创建任务时可以得到一个句柄,也可传入NULL ,这表示删除自己。
-
句柄的实质就是这个任务结构体的指针,在FreeRTOS中任务的创建利用面向对象的思想,创建的一个个任务都是结构体,删除任务的实质就类似于C语言中的free释放内存
实例:
- void vTask1( void *pvParameters )
- {
- const TickType_t xDelay100ms = pdMS_TO_TICKS( 100UL );
- BaseType_t ret;
- /* 任务函数的主体一般都是无限循环 */
- for( ;; )
- {
- /* 打印任务的信息 */
- printf("Task1 is running\r\n");
- ret = xTaskCreate( vTask2, "Task 2", 1000, NULL, 2, &xTask2Handle );
- if (ret != pdPASS) printf("Create Task2 Failed\r\n");
- // 如果不休眠的话, Idle任务无法得到执行
- // Idel任务会清理任务2使用的内存
- // 如果不休眠则Idle任务无法执行, 最后内存耗尽
- vTaskDelay( xDelay100ms );
- }
三、任务状态
- 当前正在进行的任务,是running状态;其他所有任务都处于not running状态
-
"not running"状态还可以细分为:ready :就绪,随时可以运行blocked :阻塞,该任务在等待某一事件发生suspended :挂起,该任务暂停休息
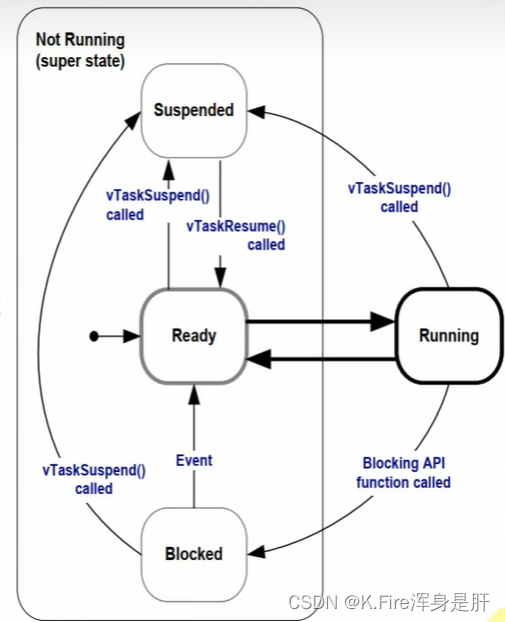
当创建任务并开始任务调度后,所有任务都处于Ready就绪状态,系统随机挑选一个任务Running,正在执行的任务可以使用vTaskSuspend函数使自己进入挂起状态(传入参数NULL或自己的句柄),也可以使其他任务进入挂起状态(传入参数为需要挂起任务的句柄),进入暂停状态后,需要在别的任务执行过程中调用vTaskResume函数该任务才会重新进入Ready状态;
在任务执行过程中,需要等待某个函数或事件的发生,则进入挂起状态(Baocked),当等待的事件(可能是中断或某个任务)发生后该任务才会恢复Ready状态。
总结
关于任务简单写这些,后面进行内存管理、堆栈、队列等的介绍
-
相关阅读:
python树状打印项目路径
浅谈混迹力扣和codeforces上的几个月
【AI视野·今日CV 计算机视觉论文速览 第268期】Mon, 16 Oct 2023
Transformer for CV
计算机毕业论文微信小程序毕业设计项目ssm社区心理健康服务平台+后台管理系统|前后分离VUE[包运行成功]
day22-web开发会话技术04
ThreeJS-3D教学三:平移缩放+物体沿轨迹运动
JS【filter过滤器】的用法
JavaEE >> Spring(2)
南芯科技在科创板提交注册:业绩增速迅猛,股东包括红杉、顺为等
- 原文地址:https://blog.csdn.net/qq_52785580/article/details/126803471
