-
机器人自适应控制
自适应控制是控制器使用的控制方法,它必须适应具有可变参数或最初不确定的受控系统。[1]例如,当飞机飞行时,由于燃料消耗,它的质量会慢慢减小;需要一种能够适应这种不断变化的条件的控制法则。自适应控制不同于鲁棒控制,因为它不需要关于这些不确定或时变参数的边界的先验信息。
鲁棒控制保证如果变化在给定的范围内,则控制律不需要改变,而自适应控制则关注控制律本身的改变。
一般来说,应该区分:
- 前馈自适应控制
- 反馈自适应控制
- 模型参考自适应控制器 (MRAC) – 包含定义所需闭环性能的参考模型
- 梯度优化 MRAC——当性能与参考不同时,使用本地规则调整参数。例如:“MIT 规则”。
- 稳定性优化的 MRAC

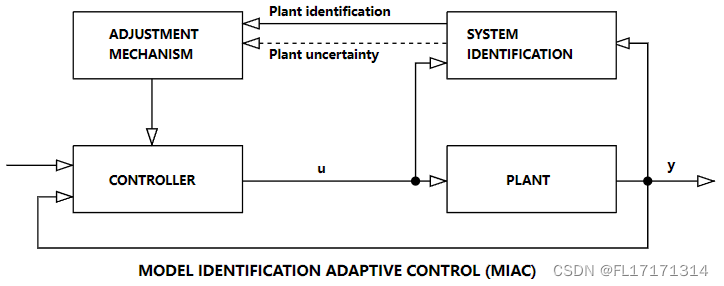
- 模型识别自适应控制器 (MIAC) – 在系统运行时 执行系统识别
- 谨慎的自适应控制器 - 使用当前 SI 修改控制律,允许 SI 不确定性
- 确定性等价自适应控制器——以当前 SI 为真实系统,假设没有不确定性
- 非参数自适应控制器
- 参数自适应控制器
- 显式参数自适应控制器
- 隐式参数自适应控制器
Simulink 机器人自适应控制例子:
连杆机器人的无源自适应控制
差分转向移动机器人基于速度的动力学模型及自适应控制器
GITHUB 自适应控制 Matlab代码:
-
相关阅读:
[附源码]java毕业设计郴职图书馆管理系统
LearnOpenGL学习笔记——延迟着色法
【简易 教程:Pytorch 配置 GPU版本】
hive 3.1.4部署
JavaScript(ES6)入门
C++学习之:布隆过滤器与哈希切分
一维时间序列信号的多小波分析方法(MATLAB R2021B)
Springboot游戏道具在线交易平台毕业设计源码171956
小红书达人投放比例是多少合适?品牌方必看
巨杉数据库登榜互联网周刊“2022中国软件150强”及“2022大数据服务TOP150”
- 原文地址:https://blog.csdn.net/weixin_51367832/article/details/126806770
 https://github.com/topics/adaptive-control?l=matlab&o=asc&s=stars
https://github.com/topics/adaptive-control?l=matlab&o=asc&s=stars