-
《Orange‘s 一个操作系统的实现》第六章
进程
-
进程的并行数取决于 CPU 的内核数量。以单核 CPU 为例,它在同一时间段只能执行一个进程。
-
由于 CPU 的进程调度太快,导致我们误以为它们都是同一时刻运行。
-
诱发进程切换的因素有很多,比较典型的是时间中断。
当时间中断发生时,中断处理程序会将控制权交给进程调度模块。
-
在同一时刻,只能有一个进程处于运行状态。
-
进程切换的操作者是操作系统的进程调度模块。
用一个数据结构来记录进程的状态信息:
进程和进程调度运行在不同的层级上,本书简单化了,使其所有任务都运行在 ring1,而进程切换运行在 ring0
最简单的进程
知识点
进程切换时的步骤:
- 进程 A 运行中。
- 时钟中断发生,从 ring1 -> ring0,时钟中断处理程序启动。
- 开始执行进程调度程序,指定好下一个要运行的进程(假设为进程 B)。
- 进程 B 从等待状态恢复到执行状态,从 ring0 -> ring1。
- 进程 B 开始运行。

保存某个进程的状态信息: 入栈所有寄存器。
恢复某个进程的状态信息: 弹出所有寄存器。
进程表:是一个数组,由多个进程对象组成。
; PROCESS 进程对象 —— 描述进程信息 include/proc.h typedef struct s_stackframe { u32 gs; /* \ */ u32 fs; /* | */ u32 es; /* | */ u32 ds; /* | */ u32 edi; /* | */ u32 esi; /* | pushed by save() */ u32 ebp; /* | */ u32 kernel_esp; /* <- 'popad' will ignore it */ u32 ebx; /* | */ u32 edx; /* | */ u32 ecx; /* | */ u32 eax; /* / */ u32 retaddr; /* return addr for kernel.asm::save() */ u32 eip; /* \ */ u32 cs; /* | */ u32 eflags; /* | pushed by CPU during interrupt */ u32 esp; /* | */ u32 ss; /* / */ } STACK_FRAME; ; include/proc.h typedef struct s_proc { STACK_FRAME regs; // 进程的所有寄存器都保存在 STACK_FRAME 结构中 u16 ldt_sel; // LDT Selector DESCRIPTOR ldts[LDT_SIZE]; // 局部描述符 LDT u32 pid; // 进程ID char p_name[16]; // 进程名 } PROCESS; ; 进程表 include\global.c PUBLIC PROCESS proc_table[NR_TASKS] ; NR_TASKS:最大进程允许数- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
程序不同状态下 esp 指向不同的地方:
- 进程栈 —— 进程运行时自身的堆栈。
- 进程表 —— 存储进程状态信息的数据结构。
- 内核栈 —— 进程调度模块运行时使用的堆栈。
注:编码时切记要清楚当前使用的是哪个堆栈,以免破坏掉不应破坏的数据。
特权级变换:ring1 -> ring0
- 准备 TSS:特权级由外向内层转移时,需要从 TSS 中取出内层的 ss 和 esp 作为目标代码的 ss 和 esp。
- 为每个进程准备 LDT:由于每个进程都是独立的,因此需要用到的描述符都要放在局部描述符表 LDT 中。
特权级变换:ring0 -> ring1
程序一开始我们的代码都是运行在 ring0 中,因此想要运行一个进程就需要从 ring0 -> ring1,这将是第一个运行的进程。
也就是说,一开始我们便可以假设成触发时钟中断,执行进程调度模块。
代码实现
时钟中断处理程序
最简单的任务是:完成从 ring1 -> ring0
ALIGN 16 hwint00: iretd- 1
- 2
- 3
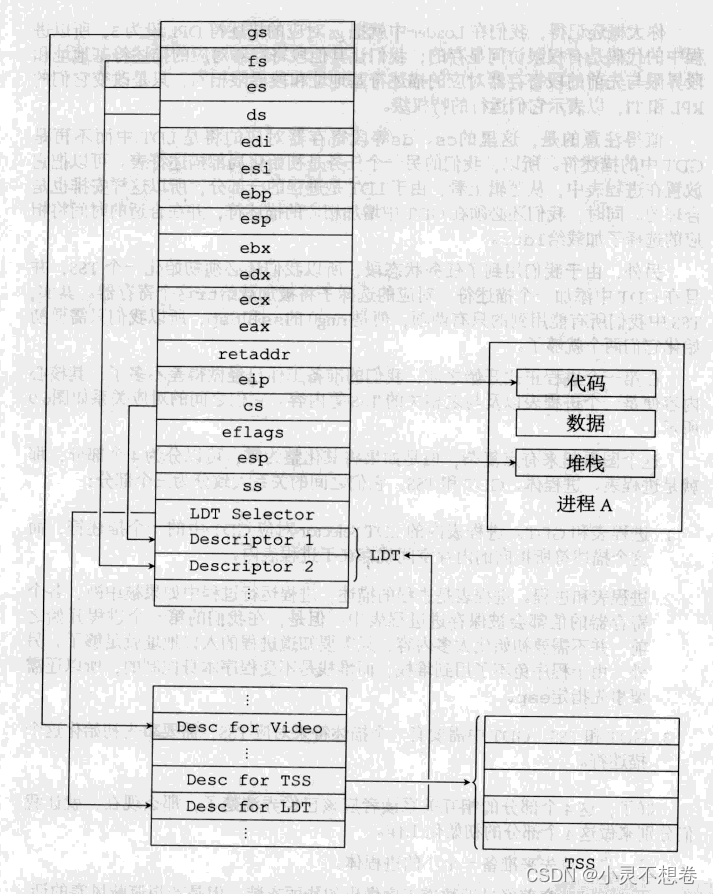
进程表、进程体、GDT、TSS 之间的关系
进程对象 PROCESS 中保存着进程的状态信息,一个进程若要运行,则需要依赖这里面的信息,因此我们需要初始化这些信息,使其成功运行第一个进程。
关系:
- 进程对象和 GDT:进程对象中的 LDT Selector 对应 GDT 中的一个描述符,而这个描述符所指向的内存空间就存在于进程表内。
- 进程对象和进程:若一个进程发生了时钟中断,则各个寄存器的值都会被保存在进程对象中。程序初始时的第一个进程只需要初始化入口地址就好了。由于堆栈不受程序本身控制,因此需要先手动指定 esp 的值。
- GDT 和 TSS:GDT 中需要有一个描述符来对应 TSS,需要事先初始化这个描述符。
图示:
第一步:编写进程体。
// kernel\main.c void TestA() { int i = 0; while(1) { disp_str("A"); disp_int(i++); disp_str("."); delay(1); } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
// kernel\main.c PUBLIC int kernel_main() { disp_str("-----\"kernel_main\" begins-----\n"); ... while(1); }- 1
- 2
- 3
- 4
- 5
- 6
; kernel\kernel.asm extern kernel_main ... cstart: jmp kernel_main- 1
- 2
- 3
- 4
- 5
第二步:初始化进程表。
STACK_FRAME、PROCESS 结构定义上文已经给出。
初始化进程对象:
// kernel\main.c PUBLIC int kernel_main() { disp_str("-----\"kernel_main\" begins-----\n"); PROCESS* p_proc = proc_table; // 进程表 p_proc -> ldt_sel = SELECTOR_LDT_FIRST; // 设置 LDT Selector // 将 SELECTOR_KERNEL_CS 所指向的描述符拷贝到进程 PCB 的 LDTS[0] 处 memcpy(&p_proc -> ldts[0], &gdt[SELECTOR_KERNEL_CS >> 3], sizeof(DESCRIPTOR)); p_proc -> ldts[0].attr1 = DA_C | PRIVILEGE_TASK << 5; // 设置属性,更改 DPL // 将 SELECTOR_KERNEL_DS 所指向的描述符拷贝到进程 PCB 的 LDTS[1] 处 memcpy(&p_proc -> ldts[1], &gdt[SELECTOR_KERNEL_DS >> 3], sizeof(DESCRIPTOR)); p_proc -> ldts[1].attr1 = DA_DRW | PRIVILEGE_TASK << 5; // 设置属性,更改 DPL // Tips:右移 3 位表示去掉选择子后面的 TI 和 RPL,留下描述符索引 // 构建选择子,选择子结构:描述符索引(15~3) TI(2) RPL(1~0) // LDT 共有两个描述符,分别被初始化成内核代码段和内核数据段,只是改变了一下 DPL 使其运行在低特权级下 // CS 指向第一个描述符 p_proc -> regs.cs = (0 & SA_RPL_MASK & SA_TI_MASK) | SA_TIL | RPL_TASK; // 其它的指向第二个描述符 p_proc -> regs.ds = (8 & SA_RPL_MASK & SA_TI_MASK) | SA_TIL | RPL_TASK; p_proc -> regs.es = (8 & SA_RPL_MASK & SA_TI_MASK) | SA_TIL | RPL_TASK; p_proc -> regs.fs = (8 & SA_RPL_MASK & SA_TI_MASK) | SA_TIL | RPL_TASK; p_proc -> regs.ss = (8 & SA_RPL_MASK & SA_TI_MASK) | SA_TIL | RPL_TASK; // gs 仍然指向显存,只是改变了 RPL p_proc -> regs.gs = (SELECTOR_KERNEL_GS & SA_RPL_MASK) | RPL_TASK; // TestA 这是最先开始运行的 p_proc -> regs.eip = (u32) TestA; // esp 表示 TestA 这个程序运行所需的栈 p_proc -> regs.esp = (u32) task_stack + STACK_SIZE_TOTAL; // 设置标志位,IF=1, IOPL=1, 第二位总是为 1 // 设置 IOPL 后进程就可以使用 I/O 指令了 // 并且中断会在 iretd 执行时被打开(之前在 kernel.asm 中 sti 被注释掉了,这里会自动打开) p_proc -> regs.eflags = 0x1202; // 挖坑 while(1); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
// kernel/protect.c PUBLIC void init_prot() { ... // 填充 GDT 中进程的 LDT 的描述符 init_descriptor(&gdt[INDEX_LDT_FIRST], vir2phys(seg2phys(SELECTOR_KERNEL_DS), proc_table[0].ldts), LDT_SIZE * sizeof(DESCRIPTOR) - 1, DA_LDT); } // 根据段名(即段选择子)转32位段基地址 PUBLIC u32 seg2phys(u16 seg) { // 根据描述符索引去 GDT 寻找对应的描述符 DESCRIPTOR* p_dest = &gdt[seg >> 3]; // 将描述符中分开的三个基地址拼凑成一个完整的段基地址 return (p_dest -> base_high << 24 | p_dest -> base_mid << 16 | p_dest -> base_low); } // 初始化段描述符 PRIVATE void init_descriptor(DESCRIPTOR* p_desc, u32 base, u32 limit, u16 attribute) { p_desc -> limit_low = limit & 0x0FFFF; p_desc -> base_low = base & 0x0FFFF; p_desc -> base_mid = (base >> 16) & 0x0FF; p_desc -> attr1 = attribute & 0xFF; p_desc -> limit_high_attr2 = ((limit >> 16) & 0x0F) | (attribute >> 8) & 0xF0; p_desc -> base_high = (base >> 24) & 0x0FF; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
// include/protect.h // 线性地址 -> 物理地址 #define vir2phys(seg_base, vir) (u32) (((u32) seg_base) + (u32) (vir))- 1
- 2
- 3
第三步:准备 GDT 和 TSS。
// kernel/protect.c PUBLIC void init_prot() { ... // 准备 GDT 和 TSS memset(&tss, 0, sizeof(tss)); tss.ss0 = SELECTOR_KERNEL_DS; init_descriptor(&gdt[INDEX_TSS], vir2phys(seg2phys(SELECTOR_KERNEL_DS), &tss), sizeof(tss) - 1, DA_386TSS); tss.iobase = sizeof(tss); ... }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
; kernel/kernel.asm csinit: ; 初始任务寄存器 TR xor eax, eax mov ax, SELECTOR_TSS ltr ax jmp kernel_main- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
// kernel/protect.c typedef struct s_tss { u32 backlink; u32 esp0; /* stack pointer to use during interrupt */ u32 ss0; /* " segment " " " " */ u32 esp1; u32 ss1; u32 esp2; u32 ss2; u32 cr3; u32 eip; u32 flags; u32 eax; u32 ecx; u32 edx; u32 ebx; u32 esp; u32 ebp; u32 esi; u32 edi; u32 es; u32 cs; u32 ss; u32 ds; u32 fs; u32 gs; u32 ldt; u16 trap; u16 iobase; /* I/O位图基址大于或等于TSS段界限,就表示没有I/O许可位图 */ }TSS;- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
启动进程
; kernel/kernel.asm extern p_proc_ready global restart ... restart: mov esp, [p_proc_ready] ; esp <- 进程(PROCESS)指针 lldt [esp + P_LDT_SEL] ; esp + P_LDT_SEL 指向 PROCESS.ldt_sel ; 下面两行:将进程对象中 regs 的末地址赋给 TSS 中 ring0 堆栈指针域(内核堆栈) esp0 lea eax, [esp + P_STACKTOP] ; esp + P_STACKTOP 指向 PROCESS.regs 中的末地址,即栈顶 mov dword [tss + TSS3_S_SP0], eax ; tss + TSS3_S_SP0 指向 TSS.esp0, pop gs pop fs pop es pop ds popad add esp, 4 iretd- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
// kernel/global.c EXTERN PROCESS* p_proc_ready;- 1
- 2
进程对象已经初始化完毕,如今只需要让 esp 指向栈顶,然后各个值弹出即可。
// kernel\main.c PUBLIC int kernel_main() { ... p_proc_ready = proc_table; // p_proc_ready 指向刚刚初始化完成的进程对象 restart(); // 调用函数设置 esp,然后弹出栈中各个值,从而执行进程 ... }- 1
- 2
- 3
- 4
- 5
- 6
- 7
Tips
此时时钟中断只会发生一次,因为我们没有将中断结束位 EOI 置为 1,告知 8259A 当前中断结束。
多进程
添加一个进程体
// kernel/main.c void TestB() { int i = 0x1000; while(1) { disp_str("B"); disp_int(i++); disp_str("."); delay(1); } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
定义相关变量与宏
一个进程只要有一个进程体和堆栈就可以运行了,因为多个进程要同时运行,所以进程体和堆栈的位置管理变成了问题,这里我们定义一个数组
task_table来管理一个任务(即进程)的开始地址、堆栈等。// include/proc.h typedef struct s_proc { STACK_FRAME regs; // 进程的所有寄存器都保存在 STACK_FRAME 结构中 u16 ldt_sel; // LDT Selector DESCRIPTOR ldts[LDT_SIZE]; // 局部描述符 LDT u32 pid; // 进程ID char p_name[16]; // 进程名 } PROCESS; typedef struct s_task { task_f initial_eip; // 进程体的函数指针 int stacksize; // 该进程的堆栈大小 char name[32]; // 该进程的名称 } TASK;- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
// include/type.h typedef void (*task_f) (); // 进程体的函数指针- 1
- 2
// include/global.h extern TASK task_table[]; // 管理每个任务- 1
- 2
// kernel/global.c // 进程管理表 // 责任:记录一个任务(进程)的开始地址、堆栈等信息 PUBLIC TASK task_table[NR_TASKS] = { //进程体 堆栈 进程名 {TestA, STACK_SIZE_TESTA, "TestA"}, {TestB, STACK_SIZE_TESTB, "TestB"} };- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
// include/proc.h // 最大允许的进程数 #define NR_TASKS 2 // 进程中的栈 #define STACK_SIZE_TESTA 0x8000 #define STACK_SIZE_TESTB 0x8000 #define STACK_SIZE_TOTAL (STACK_SIZE_TESTA + STACK_SIZE_TESTB)- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
最后也不要忘记在 proto.h 声明新的进程体:
// include/proto.h void TestB();- 1
- 2
进程表的初始化
// kernel/main.c PUBLIC int kernel_main() { disp_str("-----\"kernel_main\" begins-----\n"); TASK* p_task = task_table; // 进程任务管理表 PROCESS* p_proc = proc_table; // 进程表 char* p_task_stack = task_stack + STACK_SIZE_TOTAL; u16 selector_ldt = SELECTOR_LDT_FIRST; int i; /* 【1】SELECTOR_LDT_FIRST 是 GDT 中被定义的唯一一个描述符 在 task_table 中定义的几个任务,便通过 for 初始化几个描述符,并且放在 SELECTOR_LDT_FIRST 之后 */ for(i = 0; i < NR_TASKS; i++) { strcpy(p_proc -> p_name, p_task -> name); p_proc -> pid = i; p_proc -> ldt_sel = selector_ldt; // 设置 LDT Selector // 将 SELECTOR_KERNEL_CS 所指向的描述符拷贝到进程 PCB 的 LDTS[0] 处 memcpy(&p_proc -> ldts[0], &gdt[SELECTOR_KERNEL_CS >> 3], sizeof(DESCRIPTOR)); p_proc -> ldts[0].attr1 = DA_C | PRIVILEGE_TASK << 5; // 设置属性,更改 DPL // 将 SELECTOR_KERNEL_DS 所指向的描述符拷贝到进程 PCB 的 LDTS[1] 处 memcpy(&p_proc -> ldts[1], &gdt[SELECTOR_KERNEL_DS >> 3], sizeof(DESCRIPTOR)); p_proc -> ldts[1].attr1 = DA_DRW | PRIVILEGE_TASK << 5; // 设置属性,更改 DPL // Tips:右移 3 位表示去掉选择子后面的 TI 和 RPL,留下描述符索引 // 构建选择子,选择子结构:描述符索引(15~3) TI(2) RPL(1~0) // LDT 共有两个描述符,分别被初始化成内核代码段和内核数据段,只是改变了一下 DPL 使其运行在低特权级下 // CS 指向第一个描述符 p_proc -> regs.cs = ((8 * 0) & SA_RPL_MASK & SA_TI_MASK) | SA_TIL | RPL_TASK; // 其它的指向第二个描述符 p_proc -> regs.ds = ((8 * 1) & SA_RPL_MASK & SA_TI_MASK) | SA_TIL | RPL_TASK; p_proc -> regs.es = ((8 * 1) & SA_RPL_MASK & SA_TI_MASK) | SA_TIL | RPL_TASK; p_proc -> regs.fs = ((8 * 1) & SA_RPL_MASK & SA_TI_MASK) | SA_TIL | RPL_TASK; p_proc -> regs.ss = ((8 * 1) & SA_RPL_MASK & SA_TI_MASK) | SA_TIL | RPL_TASK; // gs 仍然指向显存,只是改变了 RPL p_proc -> regs.gs = (SELECTOR_KERNEL_GS & SA_RPL_MASK) | RPL_TASK; // 设置进程体(函数指针)的位置 p_proc -> regs.eip = (u32) p_task -> initial_eip; /** 【2】由于堆栈是从高至低地址生长的,所以给每个进程分配空间时也要从高至低地址进行 */ p_proc -> regs.esp = (u32) p_task_stack; // esp 表示这个程序运行所需的栈 // 设置标志位,IF=1, IOPL=1, 第二位总是为 1 // 设置 IOPL 后进程就可以使用 I/O 指令了 // 并且中断会在 iretd 执行时被打开(之前在 kernel.asm 中 sti 被注释掉了,这里会自动打开) p_proc -> regs.eflags = 0x1202; p_task_stack -= p_task -> stacksize; // 完成一个进程的堆栈空间分配后,需要减去之前分配的空间 p_proc++; // 指向下一个进程 p_task++; // 指向下一个任务信息 selector_ldt += 1 << 3; } k_reenter = -1; // 判断是否中断嵌套的全局变量 p_proc_ready = proc_table; restart(); while(1); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
每个进程都会在 GDT 中对应一个 LDT 描述符。但 p_proc -> ldt_sel 只是解决了描述符在哪儿的问题,但描述符里面的内容是什么却不知道。
补充:
// kernel/global.c PUBLIC char task_stack[STACK_SIZE_TOTAL]; // 所有进程堆栈的大小总和- 1
- 2
LDT
初始化 LDT,完成后 LDT 描述符便不再是空壳。
PUBLIC void init_prot() { ... int i; PROCESS* p_proc = proc_table; u16 selector_ldt = INDEX_LDT_FIRST << 3; // 填充 GDT 中进程的 LDT 的描述符 for(i = 0; i < NR_TASKS; i++) { init_descriptor(&gdt[selector_ldt >> 3], vir2phys(seg2phys(SELECTOR_KERNEL_DS), proc_table[i].ldts), LDT_SIZE * sizeof(DESCRIPTOR) - 1, DA_LDT); p_proc++; selector_ldt += 1 << 3; } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
时钟中断处理程序
// kernel/clock.c PUBLIC void clock_handler(int req) { disp_str("#"); }- 1
- 2
- 3
- 4
加载 LDTR
; kernel/kernel.asm ALIGN 16 hwint00: ; Interrupt routine for irq 0 (the clock). sub esp, 4 ; 跳过 retaddr pushad push ds push es push fs push gs mov dx, ss mov ds, dx mov es, dx inc byte [gs:0] ; 改变第 0 行,第 0 列的字符 mov al, EOI ; out INT_M_CTL, al ; 设置 EOI 位 inc dword [k_reenter] cmp dword [k_reenter], 0 jne .re_enter ; 若发生中断重入,则跳入 .re_enter mov esp, StackTop ; 切换到内核栈 sti ; 再次开启中断 push 0 call clock_handler ; 中断处理程序 add esp, 4 cli ; 关闭中断 mov esp, [p_proc_ready] ; 离开内核栈 lldt [esp + P_LDT_SEL] lea eax, [esp + P_STACKTOP] mov dword [tss + TSS3_S_SP0], eax .re_enter: dec dword [k_reenter] pop gs pop fs pop es pop ds popad add esp, 4 ; 跳过 RETADR iretd- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
效果一
参考 P205 - 图 6.17
此时还未实现切换进程。
修改时钟中断处理程序 —— 进程切换
// kernel/clock.c PUBLIC void clock_handler(int req) { disp_str("#"); p_proc_ready++; // 下一个进程 // 若达到最大进程数,则重头开始 if(p_proc_ready >= proc_table + NR_TASKS) p_proc_ready = proc_table; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
效果二
参考 P206 - 图 6.18
代码完成 —— 添加一个进程的步骤
第一步:添加一个进程体。
// kernel/main.c void TestC() { int i = 0x1000; while(1) { disp_str("C"); disp_int(i++); disp_str("."); delay(1); } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
第二步:在 task_table 中添加进程信息。
// kernel/global.c // 进程管理表 // 责任:记录一个任务(进程)的开始地址、堆栈等信息 PUBLIC TASK task_table[NR_TASKS] = { //进程体 堆栈 进程名 {TestA, STACK_SIZE_TESTA, "TestA"}, {TestB, STACK_SIZE_TESTB, "TestB"}, {TestC, STACK_SIZE_TESTC, "TestC"} };- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
第三步:修改相关的宏与变量。
// include/proc.h // 最大允许的进程数 #define NR_TASKS 3 // 进程中的栈 #define STACK_SIZE_TESTA 0x8000 #define STACK_SIZE_TESTB 0x8000 #define STACK_SIZE_TESTC 0x8000 #define STACK_SIZE_TOTAL (STACK_SIZE_TESTA + STACK_SIZE_TESTB + STACK_SIZE_TESTC)- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
第四步:添加函数声明。
// include/proto.h void TestC();- 1
- 2
多进程代码优化
%macro hwint_master 1 call save in al, INT_M_CTLMASK ;\ or al, (1 << %1) ; | 不允许发生时钟中断 out INT_M_CTLMASK, al ;/ mov al, EOI ; out INT_M_CTL, al ; 重置 EOI 位,告知中断结束 sti ; 开启中断,CPU在响应中断的过程中会自动关闭中断,在这里重新开启,便可允许响应新的中断 push %1 call [irq_table + 4 * %1] ; 中断处理程序 pop ecx cli ; 关闭中断 in al, INT_M_CTLMASK ;\ or al, ~(1 << %1) ; | 允许发生时钟中断 out INT_M_CTLMASK, al ;/ ret %endmacro ALIGN 16 hwint00: ; Interrupt routine for irq 0 (the clock). hwint_master 0- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
中断处理函数的定义与声明:
// kernel/global.c PUBLIC irq_handler irq_table[NR_IRQ]; // 存储所有中断所对应的中断处理函数 // include/global.h extern irq_handler irq_table[]; // include/type.h typedef void (*irq_handler) (int irq); // 中断处理函数的函数指针- 1
- 2
- 3
- 4
- 5
- 6
相关宏:
// 硬件中断 #define NR_IRQ 16 // IRQ 数量 #define CLOCK_IRQ 0 #define KEYBOARD_IRQ 1 #define CASCADE_IRQ 2 // #define ETHER_IRQ 3 // 默认以太网中断向量 #define SECONDARY_IRQ 3 // 端口 2 的 RS232 中断向量 #define RS232_IRQ 4 // 端口 1 的 RS232 中断向量 #define XT_WINI_IRQ 5 /* xt winchester */ #define FLOPPY_IRQ 6 // 软盘 #define PRINTER_IRQ 7 #define AT_WINI_IRQ 14 /* at winchester */- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
初始化 irq_table:
// kernel/main.c PUBLIC void init_8259A() { ... int i; // 默认全部中断都同一处理方式 for(i = 0; i < NR_IRQ; i++) irq_table[i] = spurious_irq; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
单独对某个中断初始化:
// kernel/main.c // 对某个中断进行单独处理 PUBLIC void put_irq_handler(int irq, irq_handler handler) { disable_irq(irq); irq_table[irq] = handler; }- 1
- 2
- 3
- 4
- 5
- 6
系统调用
跳过
int xxx的形式进行调用。最简单的系统调用
kernel/syscall.asm:
%include "sconst.inc" _NR_get_ticks equ 0 ; 要跟 global.c 中的 sys_call_table 的定义相对应 INT_VECTOR_SYS_CALL equ 0x90 ; 中断类型码 global get_ticks bits 32 [section .text] get_ticks: mov eax, _NR_get_ticks int INT_VECTOR_SYS_CALL ret- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
初始化系统调用的中断门:
PUBLIC void init_prot() { init_idt_desc(INT_VECTOR_SYS_CALL, DA_386IGate, sys_call, PRIVILEGE_USER); }- 1
- 2
- 3
修改 save:
get_ticks 中有一条
mov eax, _NR_get_ticks语句,这是用于选择处理对应的处理函数的,但 save 中也用到了 eax,因此 save 中的 eax 需要变更为 esi,避免冲突。; 代码就不贴了...- 1
编写 sys_call —— 发生中断时所调用的:
; kernel/kernel.asm extern sys_call_table global sys_call ; ========================================== ; 该函数应该算是调用具体的系统函数的一个中转站吧... ; ========================================== sys_call: call save sti call [sys_call_table + eax * 4] ; 调用 sys_call_table[eax + 4] 函数 mov [esi + EAXREG - P_STACKBASE], eax ; 将 sys_call_table[eax] 的函数返回值放在进程表中 eax 的位置 ; 以便进程 P 被恢复时 EAX 中放的是正确的返回值 cli ret- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
相关宏与变量:
/* system call */ #define NR_SYS_CALL 1 // 系统调用的函数个数- 1
- 2
// kernel/global.c // 保存所有系统调用的处理函数 PUBLIC system_call sys_call_table[NR_SYS_CALL] = {sys_get_ticks};- 1
- 2
- 3
// include/type.h typedef void* system_call; // 系统调用的处理函数- 1
- 2
编写系统函数:
// kernel/proc.c PUBLIC int sys_get_ticks() { disp_str("+"); return 0; }- 1
- 2
- 3
- 4
- 5
函数声明:
// include/proto.h // 系统调用相关 // proc.c PUBLIC int sys_get_ticks(); // sys_call // syscall.asm PUBLIC void sys_call(); // int_handler PUBLIC int get_ticks();- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
修改进程体A:
// kernel/main.c void TestA() { int i = 0; while(1) { get_ticks(); disp_str("A"); disp_int(i++); disp_str("."); delay(1); } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
图解系统调用

V2
声明 ticks:
// include/global.h EXTERN int ticks; // 发生时钟中断的次数- 1
- 2
初始化 ticks:
PUBLIC int kernel_main() { ... ticks = 0; ... }- 1
- 2
- 3
- 4
- 5
修改时钟中断处理程序:
PUBLIC void clock_handler(int req) { disp_str("#"); ticks++; // 每发生一个时钟中断,便 +1 if(k_reenter != 0) { disp_str("!"); return; } p_proc_ready++; if(p_proc_ready >= proc_table + NR_TASKS) p_proc_ready = proc_table; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
修改系统处理函数:
// kernel/proc.c PUBLIC int sys_get_ticks() { return ticks; }- 1
- 2
- 3
- 4
修改进程体A:
// kernel/main.c void TestA() { int i = 0; while(1) { disp_str("A"); disp_int(get_ticks();); disp_str("."); delay(1); } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
get_ticks 的应用
8253/8254 PIT
xdm 看书 P227 去吧…,我懒了…
代码实现
相关宏:
// include/const.h /* 8253/8254 PIT (可编程时钟定时器) */ #define TIMER0 0x40 // 定时器通道 0 的 I/O 端口 #define TIMER_MODE 0x43 // 定时器模式控制的 I/O 端口 #define RATE_GENERATOR 0x34 /* 00-11-010-0 : * Counter0 - LSB then MSB - rate generator - binary */ #define TIMER_FREQ 1193182L // PC 和 AT 定时器的时钟频率 #define HZ 100 // 时钟频率(IBM-PC 上可软件设置)- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
设置 8253:
// kernel/main.c PUBLIC int kernel_main() { // 初始化 8253 PIT out_byte(TIMER_MODE, RATE_GENERATOR); out_byte(TIMER0, (u8) (TIMER_FREQ/HZ)); out_byte(TIMER0, (u8) ((TIMER_FREQ/HZ) >> 8)); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
编写延迟函数:
// kernel/clock.c PUBLIC void milli_delay(int milli_sec) { int t = get_ticks(); while(((get_ticks() - t) * 1000 / HZ) < milli_sec); }- 1
- 2
- 3
- 4
- 5
先得到 ticks 保存到 t,每次循环都获取一个 ticks,与开始时的 t 相减,得到的结果必然会以 10 进行递增,直到 < milli_sec 为止。
可以这么理解:(此刻时间 - 过去时间) * 1000 / HZ修改进程体A:
// kernel/main.c void TestA() { int i = 0; while(1) { disp_str("A"); disp_int(get_ticks();); disp_str("."); milli_delay(1000); } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
此时若其它进程B、C 也同上,处字母不同外,则运行时时钟中断发生频率可能会有误差。
解决方案:尝试将 NR_TASKS = 1,设置 task_table[NR_TASKS] 此时便是 1 个进程运行,便不会有误差。
进程调度
代码简单,虽然知道代码如何运行,但总感觉我好像缺少了一些东西的理解…,罢了罢了,以后有机会再回头看看吧…
#define HZ 100 // 时钟频率(IBM-PC 上可软件设置)
**设置 8253:** ```c // kernel/main.c PUBLIC int kernel_main() { // 初始化 8253 PIT out_byte(TIMER_MODE, RATE_GENERATOR); out_byte(TIMER0, (u8) (TIMER_FREQ/HZ)); out_byte(TIMER0, (u8) ((TIMER_FREQ/HZ) >> 8)); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
编写延迟函数:
// kernel/clock.c PUBLIC void milli_delay(int milli_sec) { int t = get_ticks(); while(((get_ticks() - t) * 1000 / HZ) < milli_sec); }- 1
- 2
- 3
- 4
- 5
先得到 ticks 保存到 t,每次循环都获取一个 ticks,与开始时的 t 相减,得到的结果必然会以 10 进行递增,直到 < milli_sec 为止。
可以这么理解:(此刻时间 - 过去时间) * 1000 / HZ修改进程体A:
// kernel/main.c void TestA() { int i = 0; while(1) { disp_str("A"); disp_int(get_ticks();); disp_str("."); milli_delay(1000); } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
此时若其它进程B、C 也同上,处字母不同外,则运行时时钟中断发生频率可能会有误差。
解决方案:尝试将 NR_TASKS = 1,设置 task_table[NR_TASKS] 此时便是 1 个进程运行,便不会有误差。
-
-
相关阅读:
纯C++自动识别设备串口
性能优化实战使用CountDownLatch
教你拥有一个自己的QQ机器人!0基础超详细保姆级教学!基于NoneBot2 Windows端搭建QQ机器人
零束智能算法引擎赋能,打造数字座舱AI“大脑”
前后端数据互传问题
《最新出炉》系列入门篇-Python+Playwright自动化测试-40-录制生成脚本
【JavaScript】Date对象(创建时间对象、常用Date方法总结)
Nautilus Chain 引入 $NAUT 通证,延续 $ZBC 的价值
Prism框架学习
git rebase 和 git merge的区别?以及你对它们的理解?
- 原文地址:https://blog.csdn.net/qq_43098197/article/details/126793475
