-
AlphaGo & Model-Based RL
AlphaGo & Model-Based RL
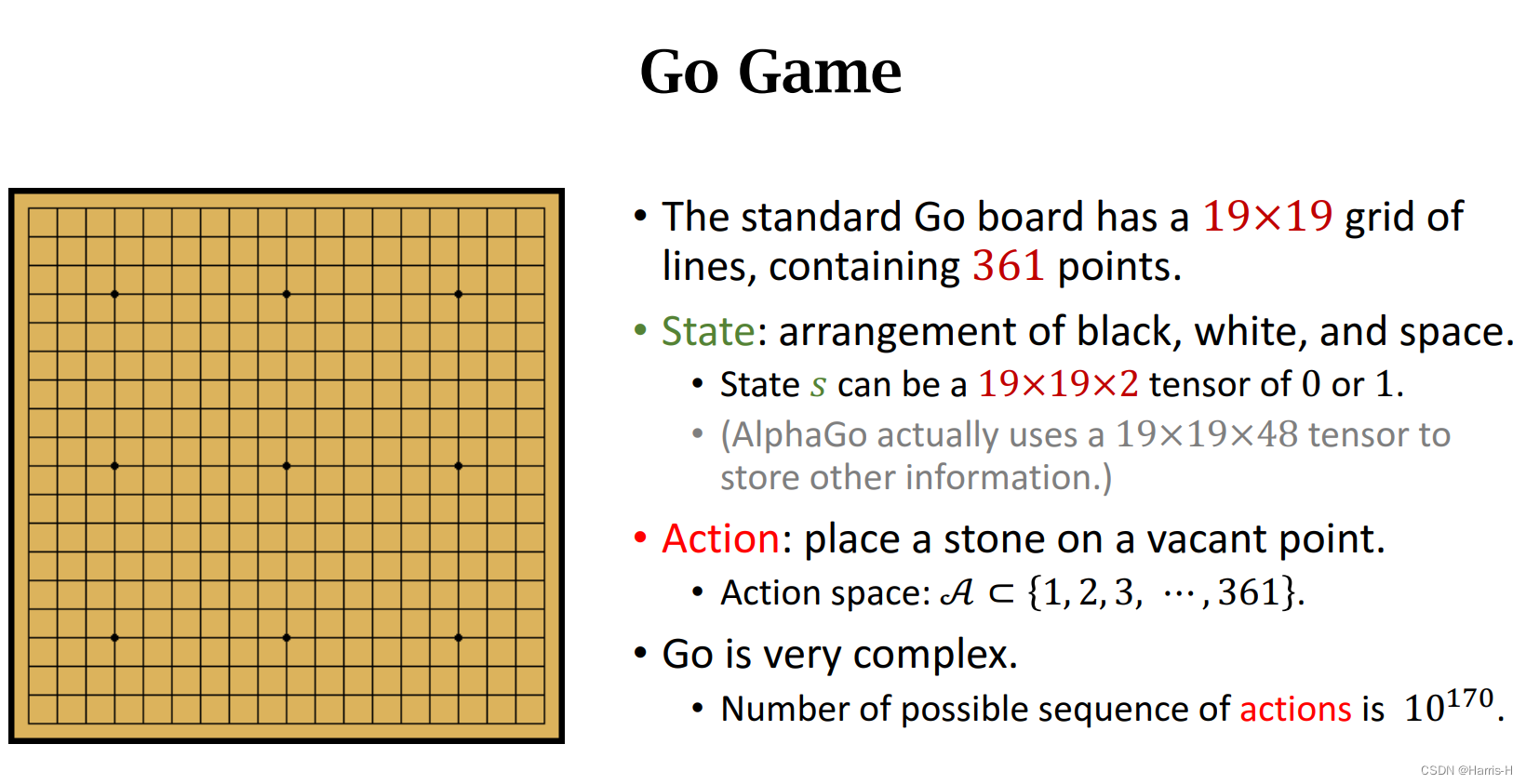
用强化学习解决围棋游戏。
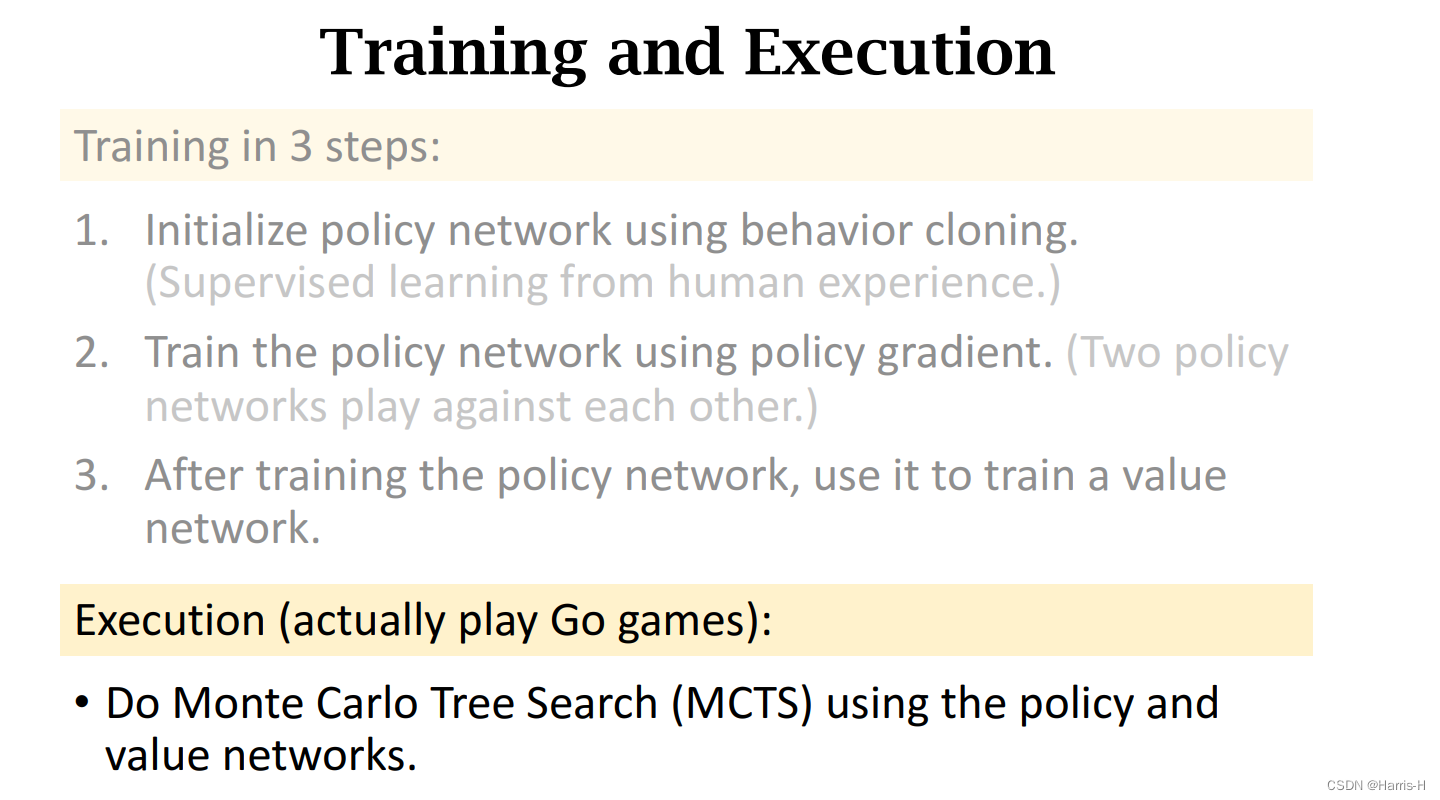
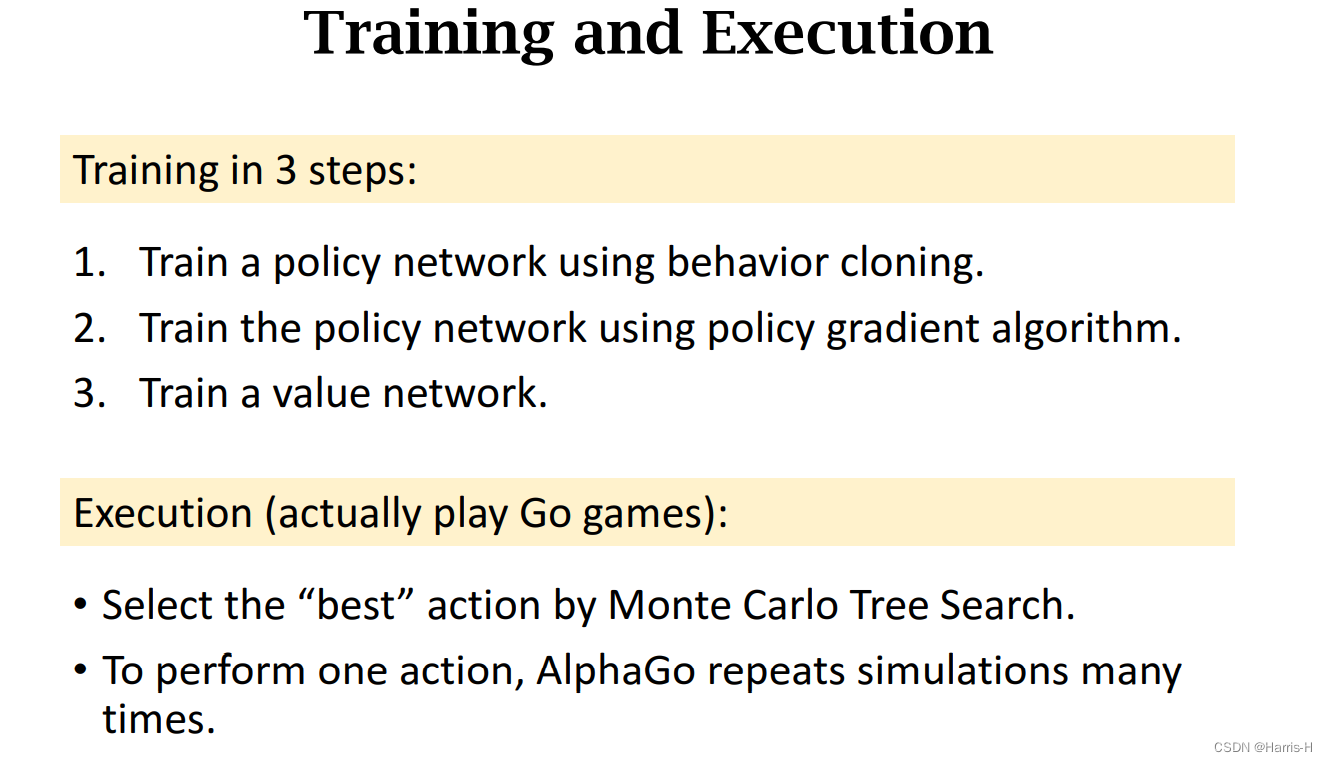
在最初的AlphaGo 采用策略网络和价值网络,先使用behavior cloning学习人类经验训练策略网络(本质是多分类),然后用策略梯度继续训练策略网络,再通过策略网络训练价值网络。
目前AlphaGo 采用 蒙特卡洛树搜索进行训练策略网络和价值网络。
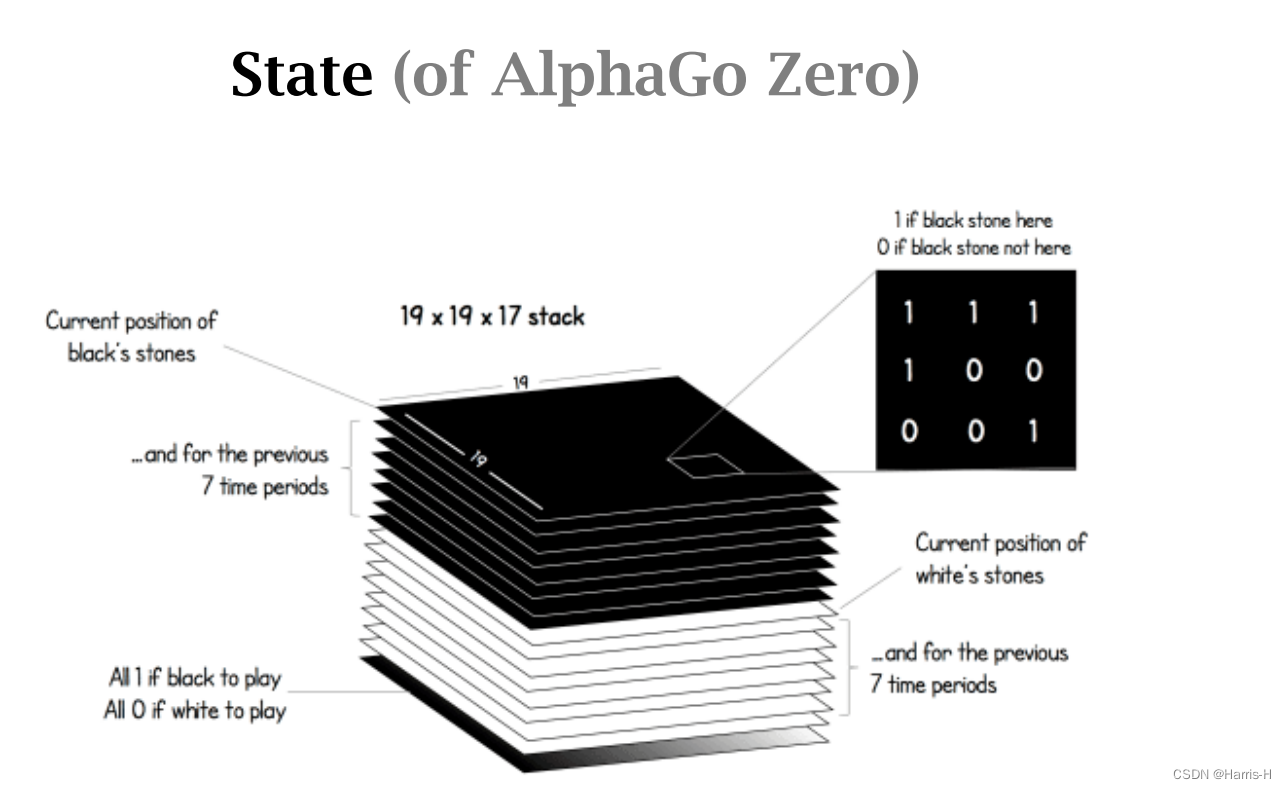
目前AlphaGo Zero使用 19 × 19 × 17 19\times 19\times 17 19×19×17的状态,保存黑棋和白棋的最近 8 8 8个状态,和当前是该谁走的一个状态。
1.策略网络
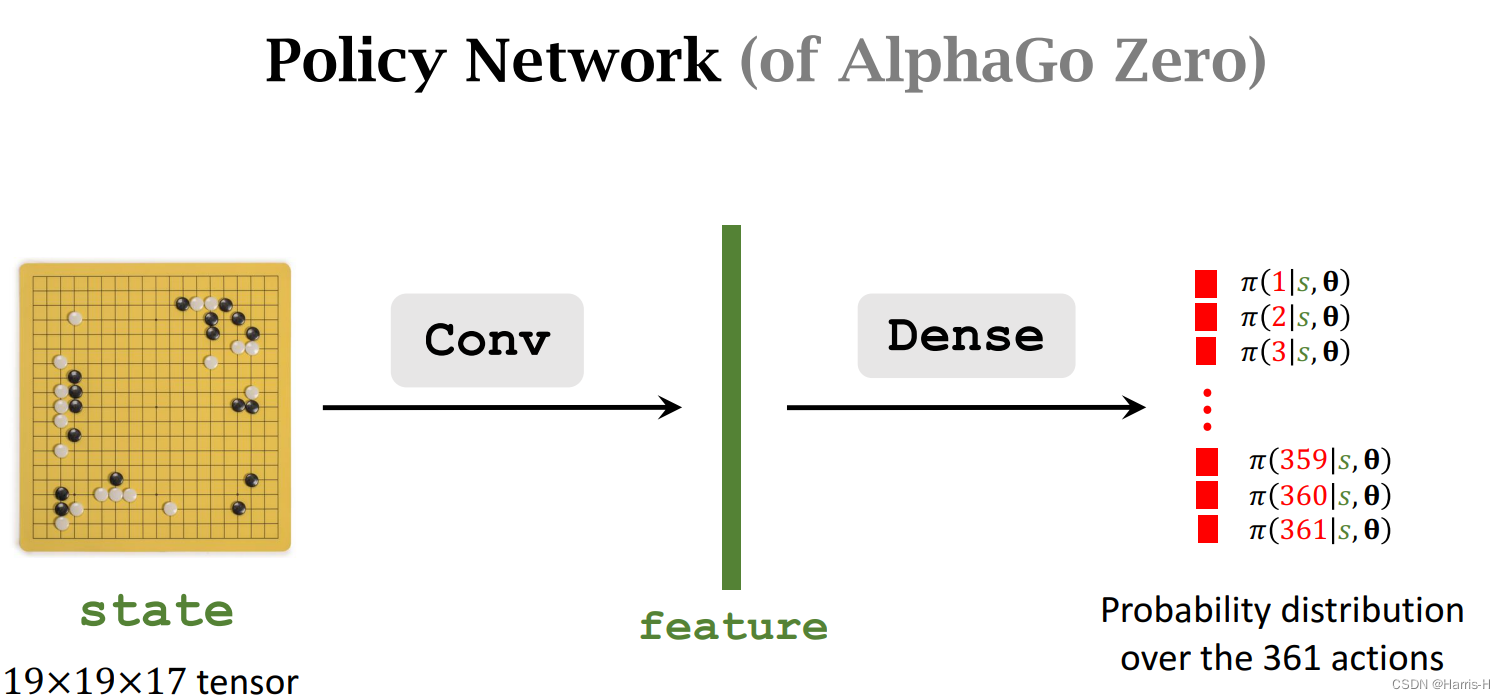
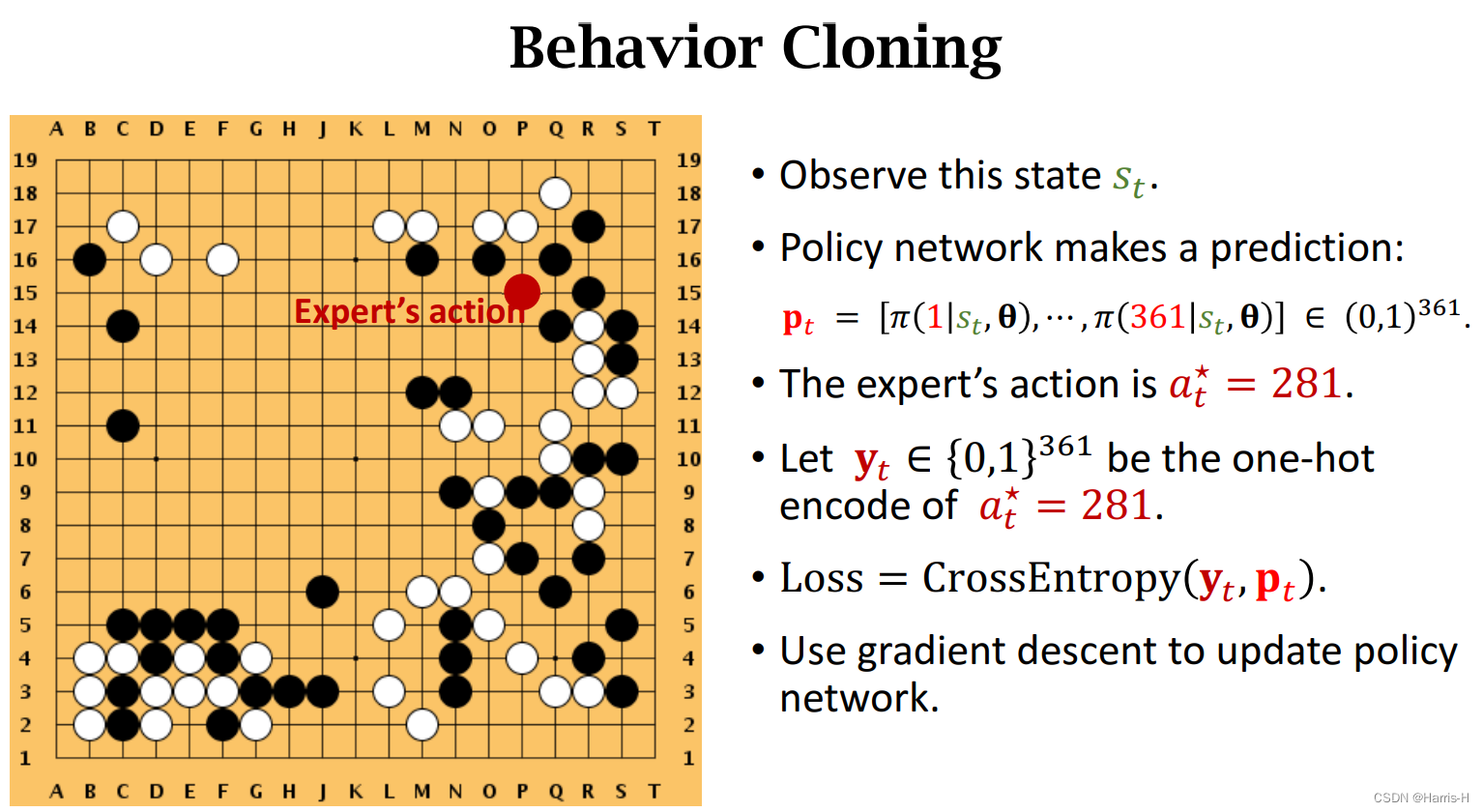
策略网络输出每个动作的概率分布。
2.Behavior cloning
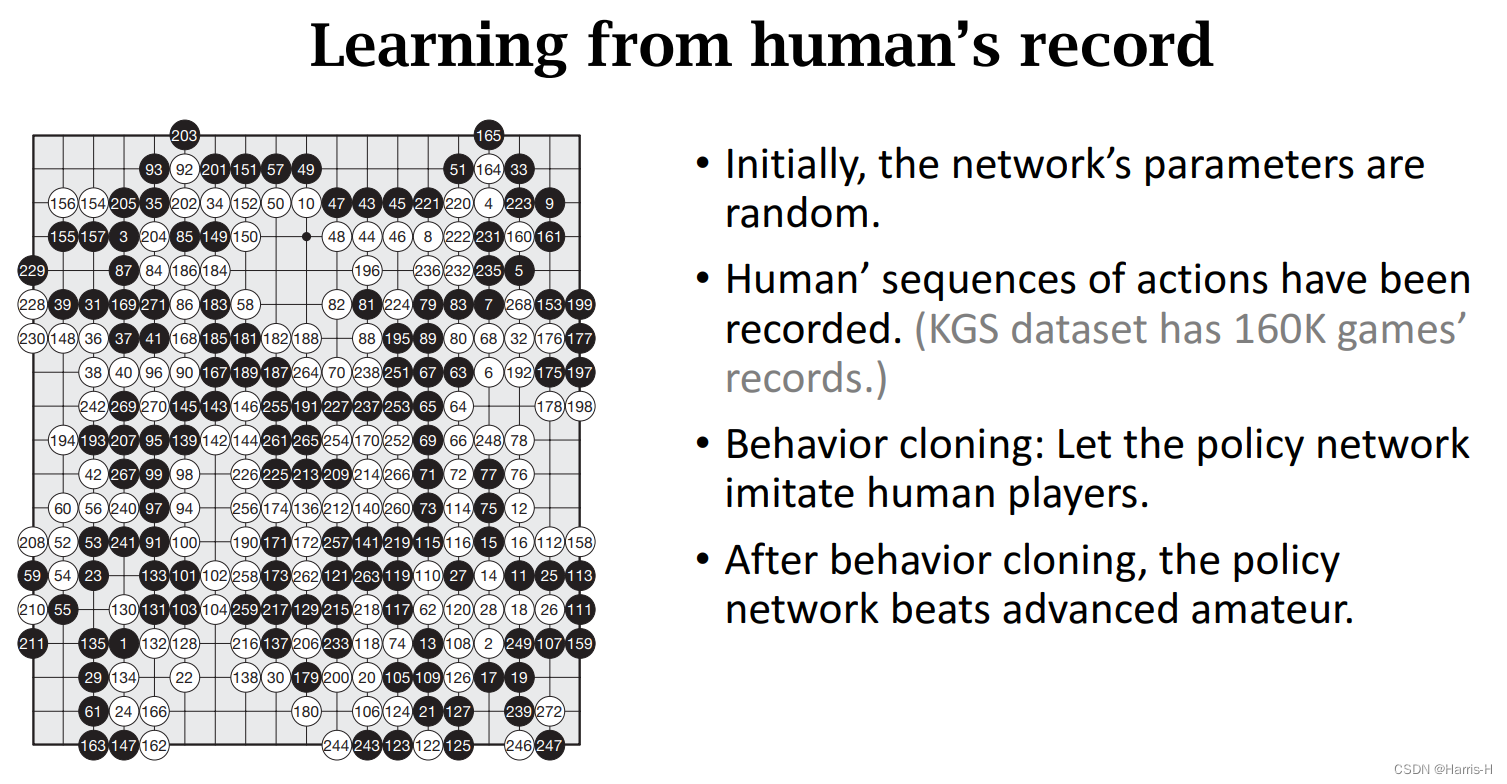
从人类棋盘的数据集,模仿人类的经验,本质是361个类别,进行分类,不属于强化学习,而属于模仿学习。
只使用便相当于6-9段的棋手,但是如果遇到在训练集中未见到的 s t s_t st,且状态的可能性十分巨大,动作 a t a_t at可能是坏的,并且这种坏的reward会不断积累,导致最终输掉。因此采用RL就非常有必要。
3.策略网络的强化学习
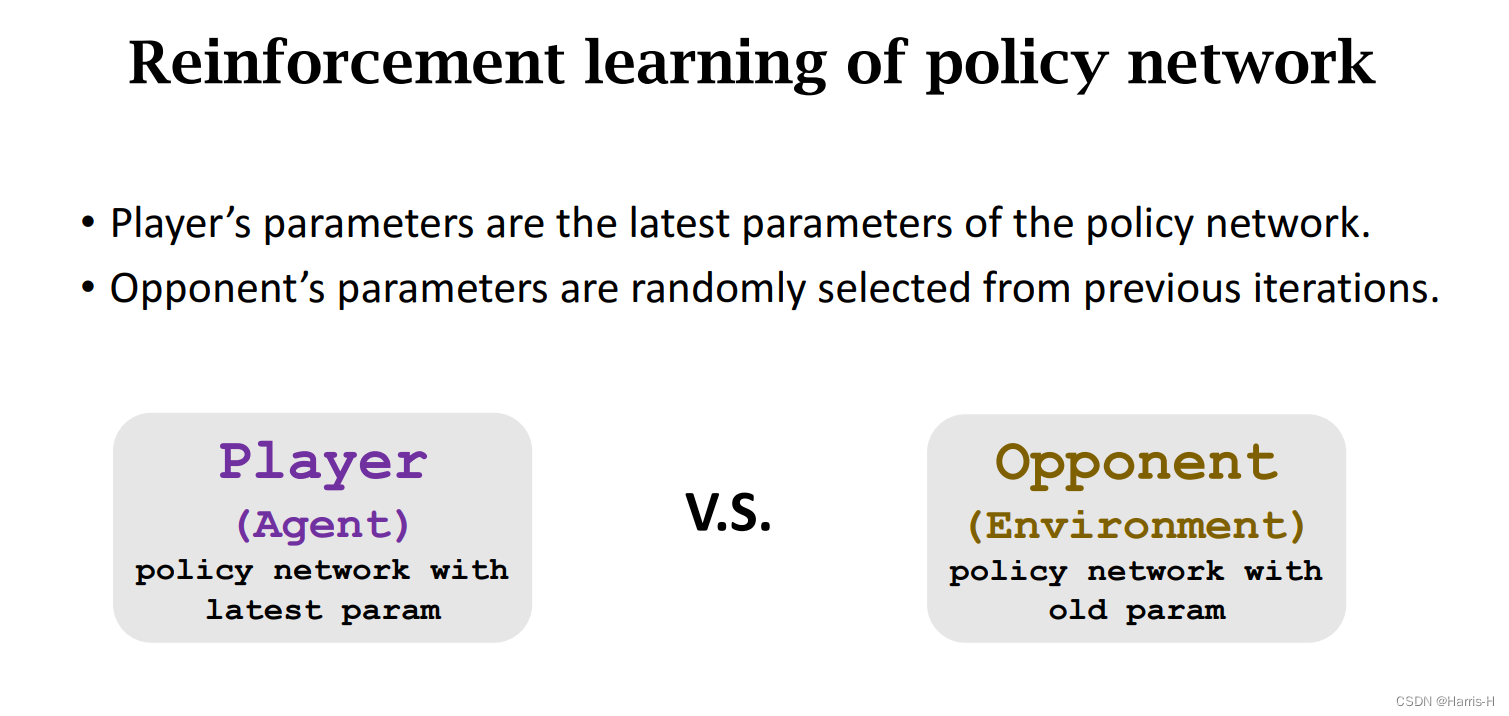
采用自我对抗的方式,Agent使用最新参数的策略网络选择动作,而对手Opponent采用策略网络的旧参数选择动作。
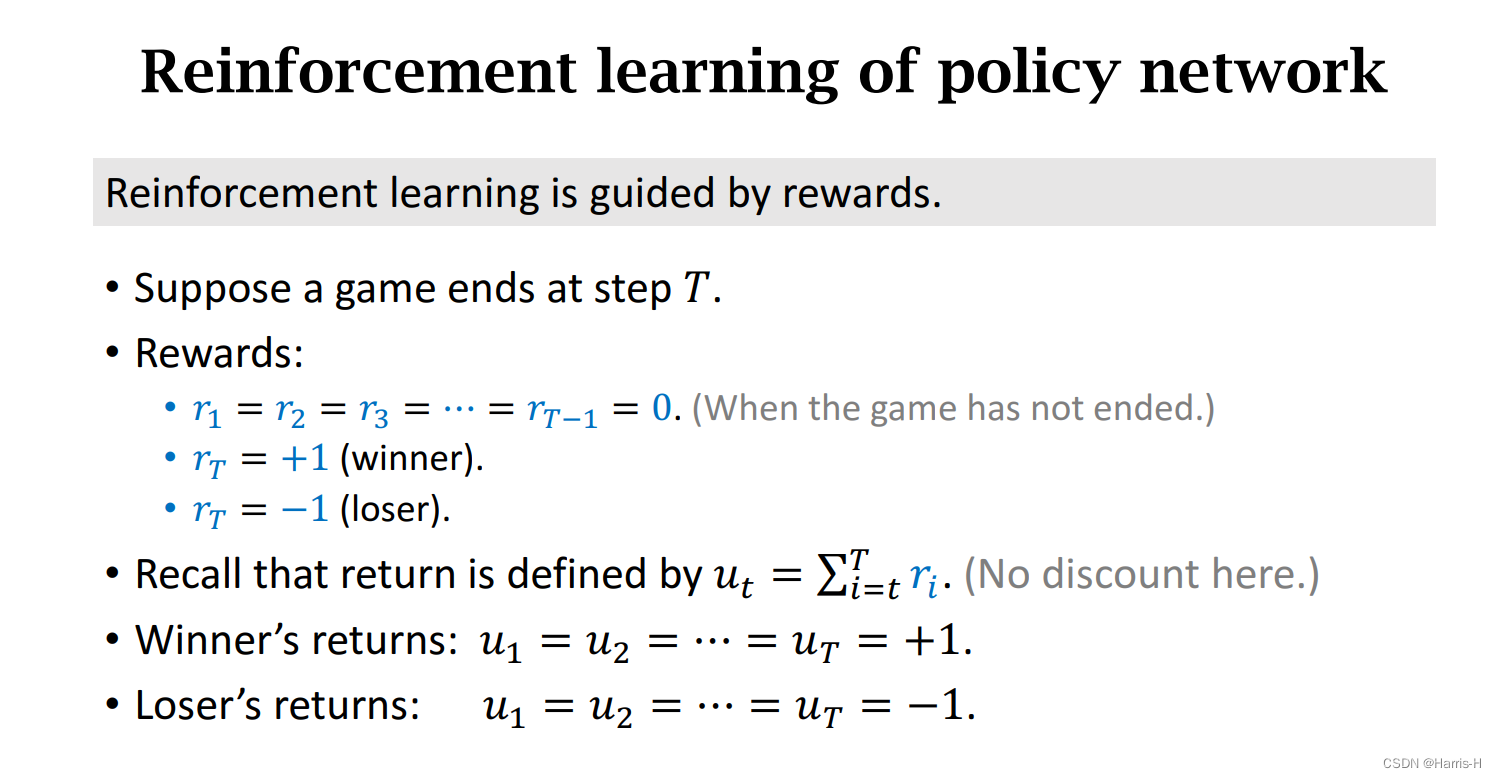
我们定义 r t r_t rt为 t t t时刻的奖励, u t u_t ut表示回报,若 r T = 1 r_T=1 rT=1,说明第一步到第 T T T步都是好棋,所以 u 1 = u 2 = ⋯ = u T = 1 u_1=u_2=\dots=u_T=1 u1=u2=⋯=uT=1,反之 u 1 = u 2 = ⋯ = u T = − 1 u_1=u_2=\dots=u_T=-1 u1=u2=⋯=uT=−1
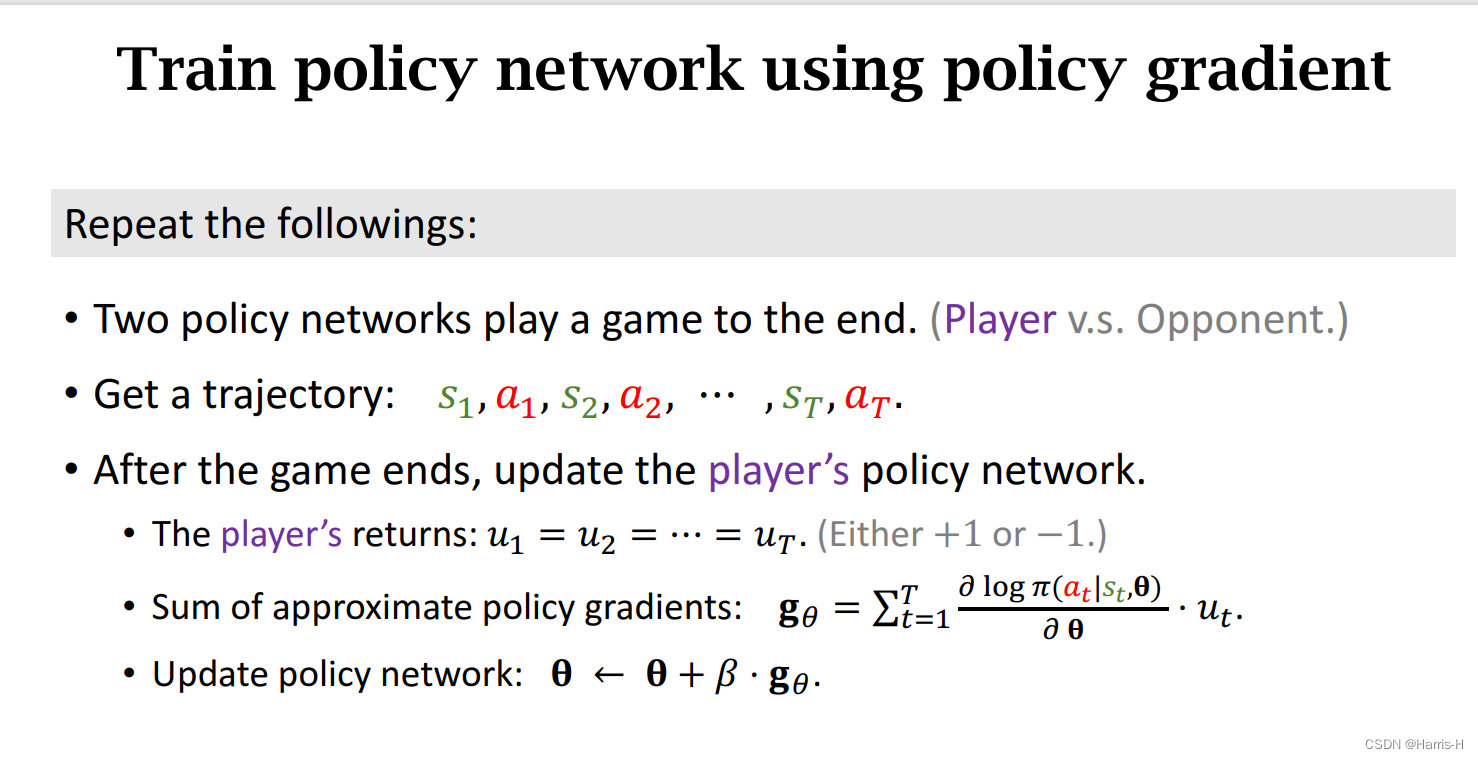
然后采用策略梯度上升更新参数 θ \theta θ
4.价值网络
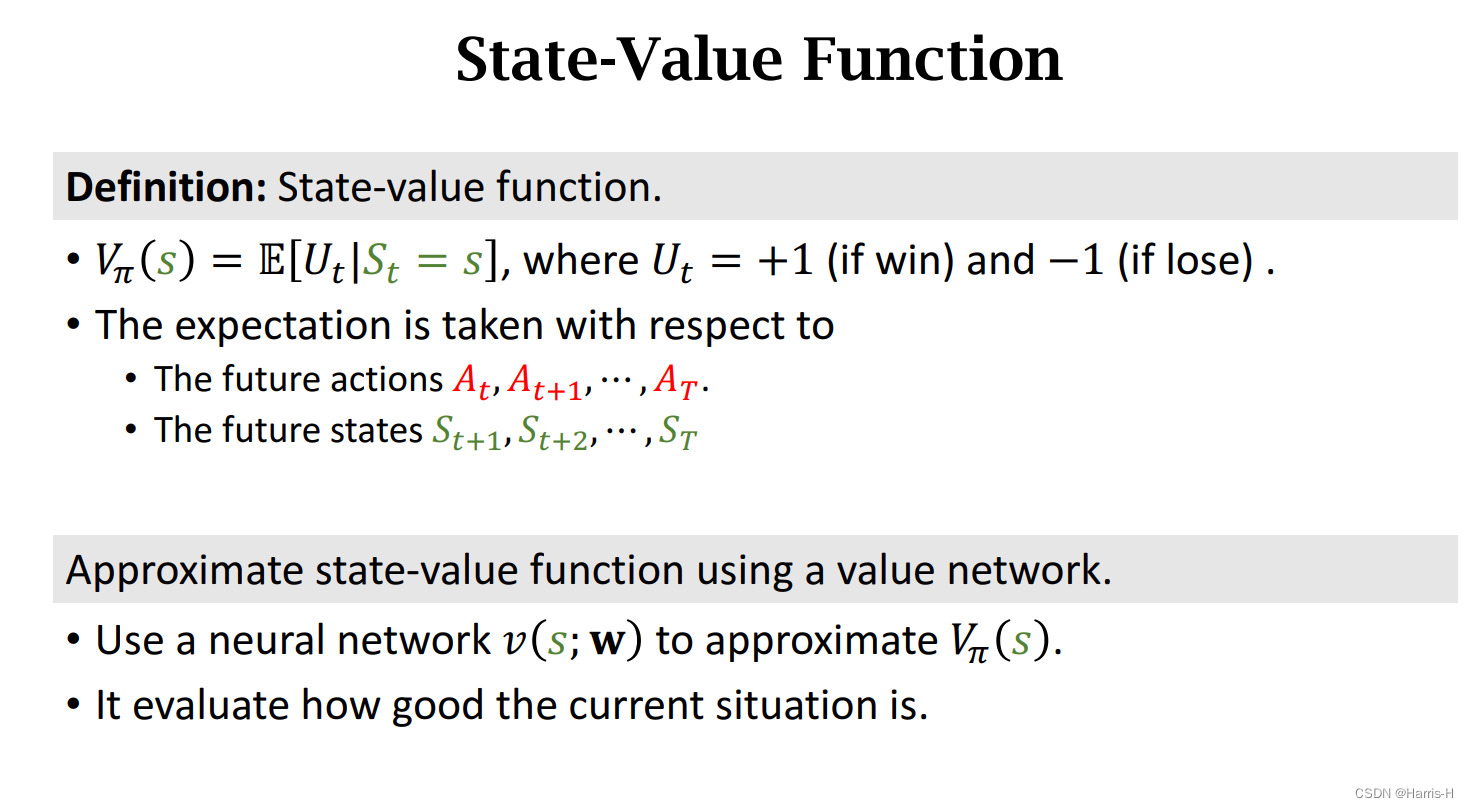
这里的价值网络近似的是 V π ( s ) V_\pi(s) Vπ(s)函数,与之前的actor-critic算法里不同。
也就是 U t U_t Ut的期望,用来表示在策略 π \pi π下,状态 s s s的胜率。
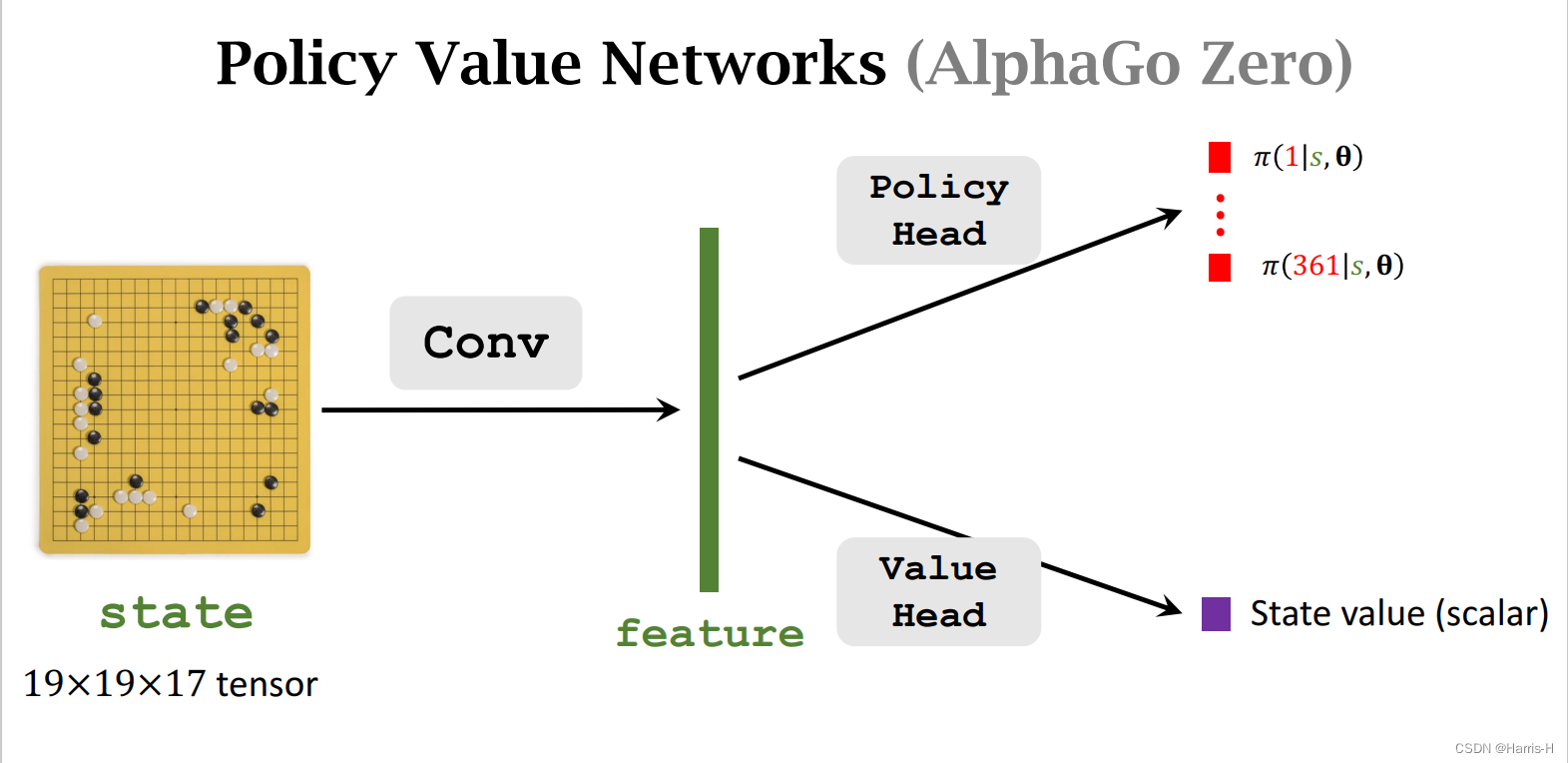
因为两个网络的相似,因此卷积层可以共用。
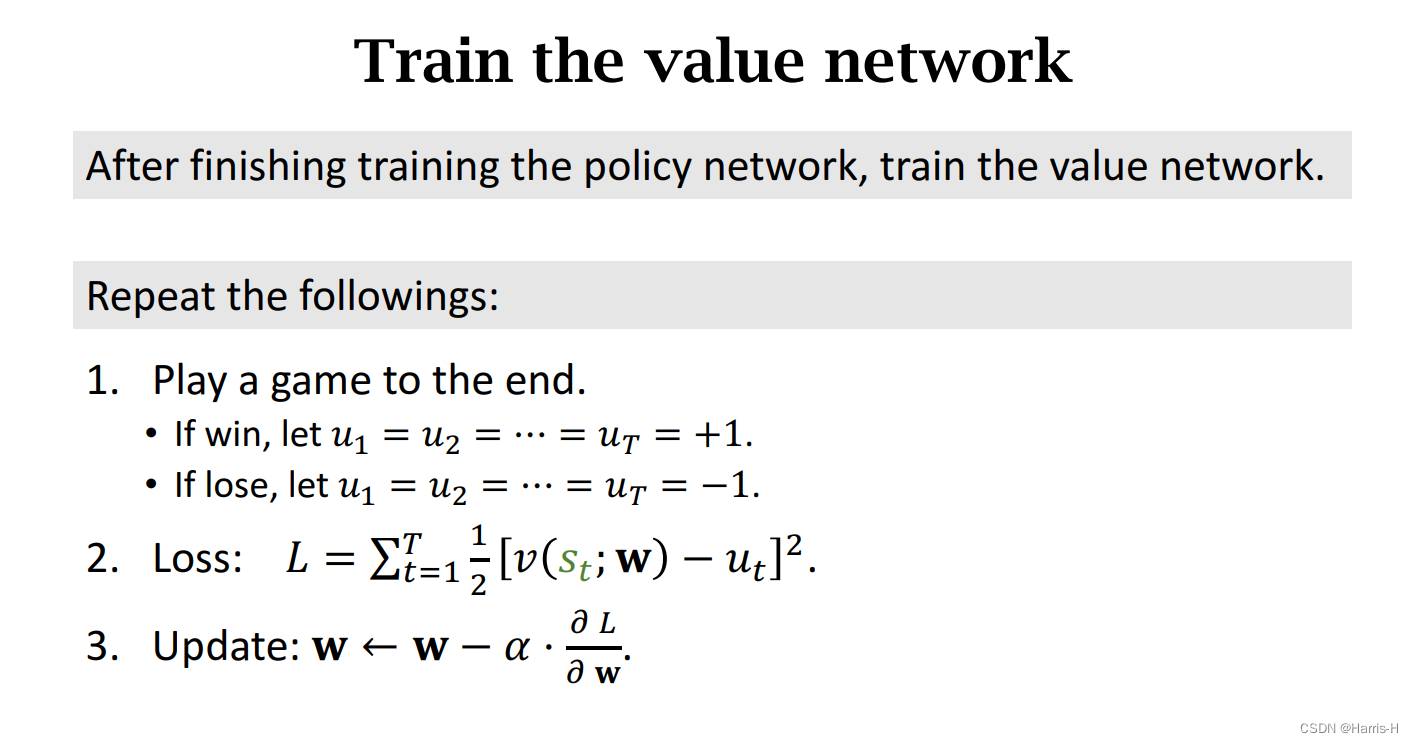
采用梯度下降更新 w w w。
5.蒙特卡洛树搜索
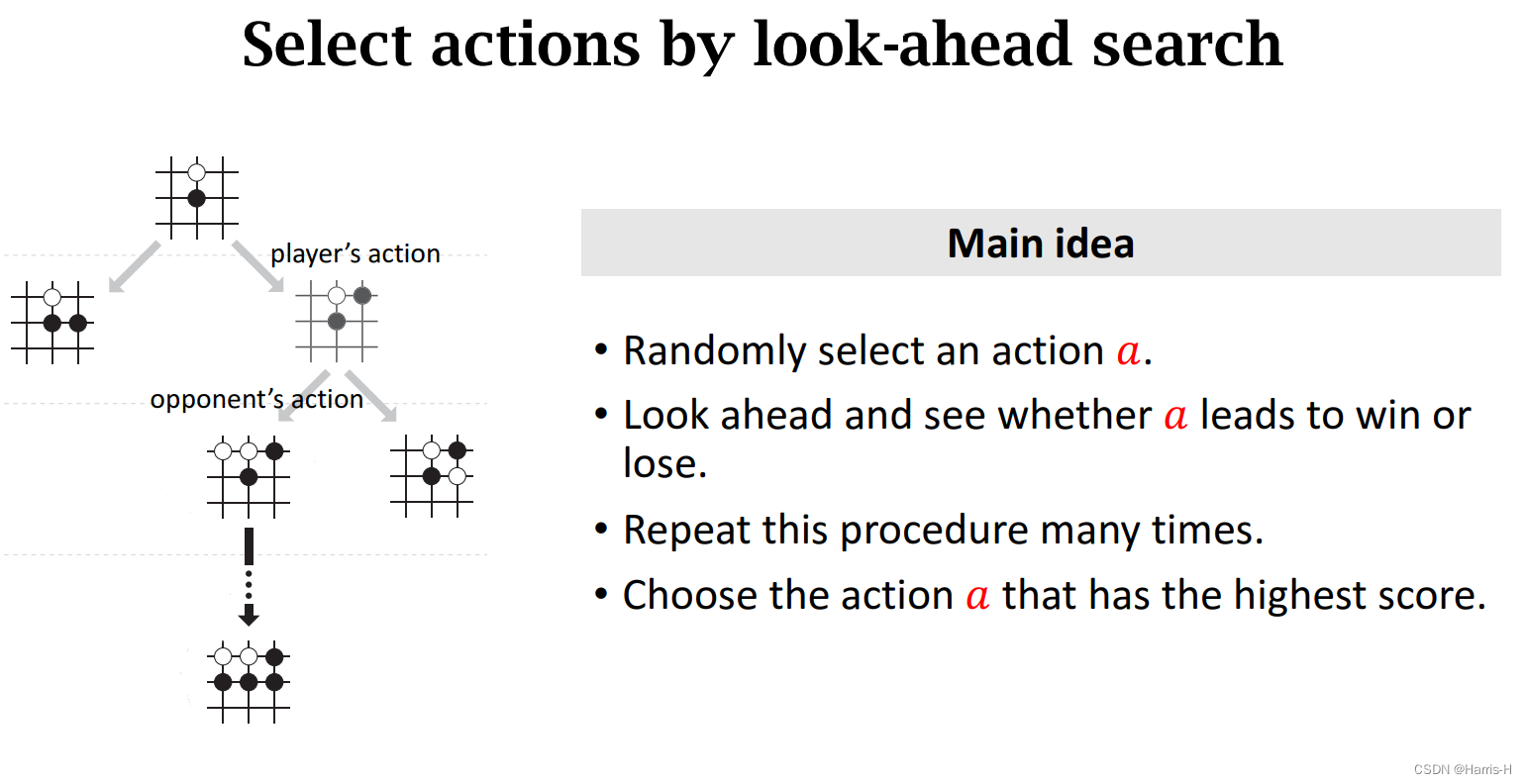
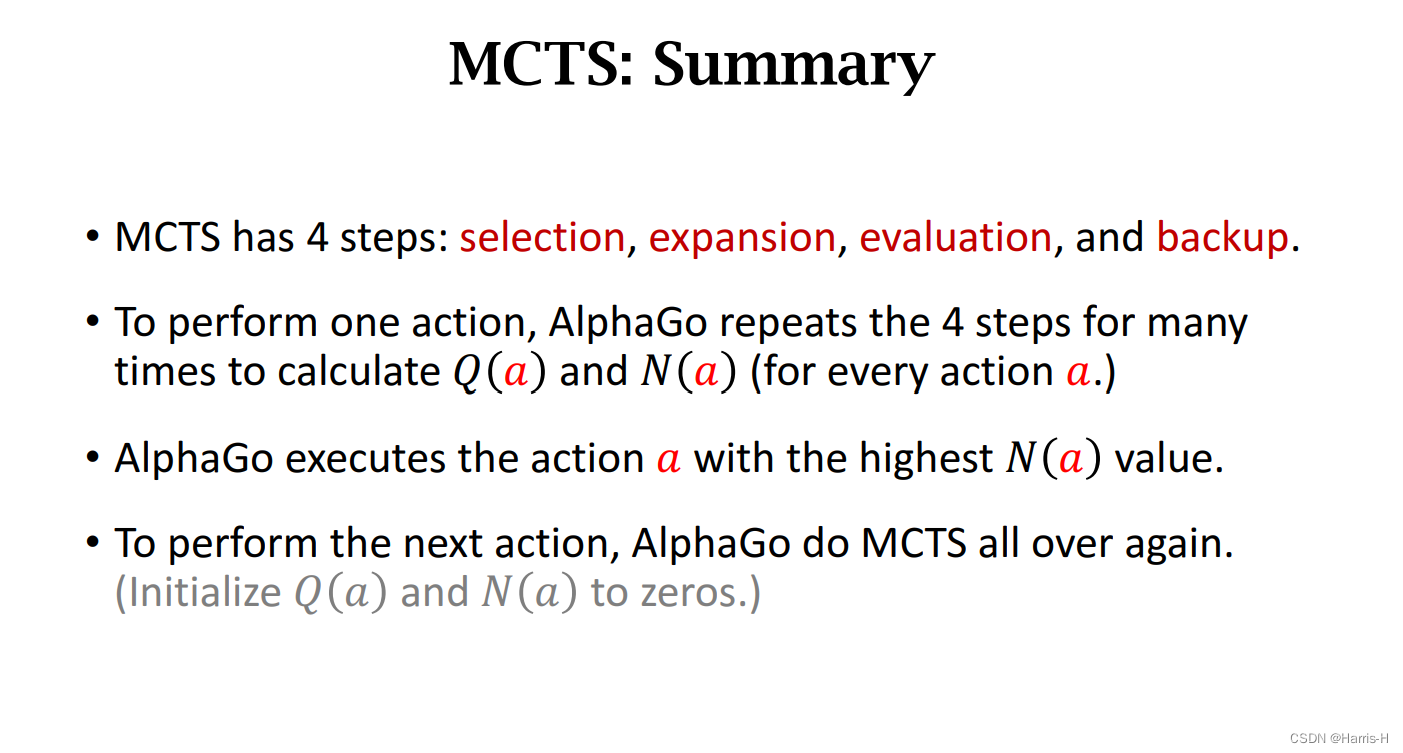
根据策略函数选取若干个较优的 a a a,然后采用树搜索,类似 d f s dfs dfs,进行自我对抗直到结束,然后重复多次。给每个动作 a a a打分,选取打分最高的执行动作 a a a。
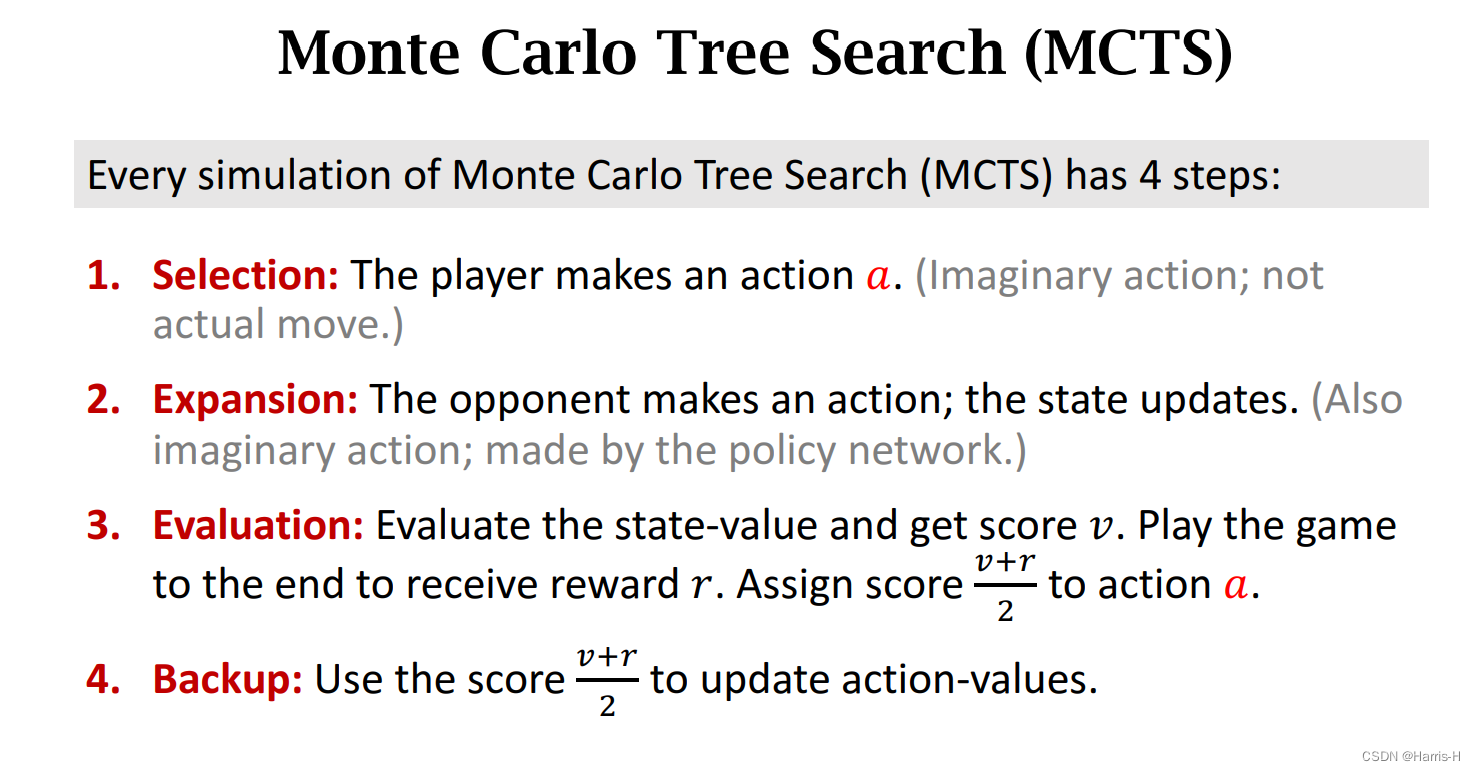
具体步骤如上。
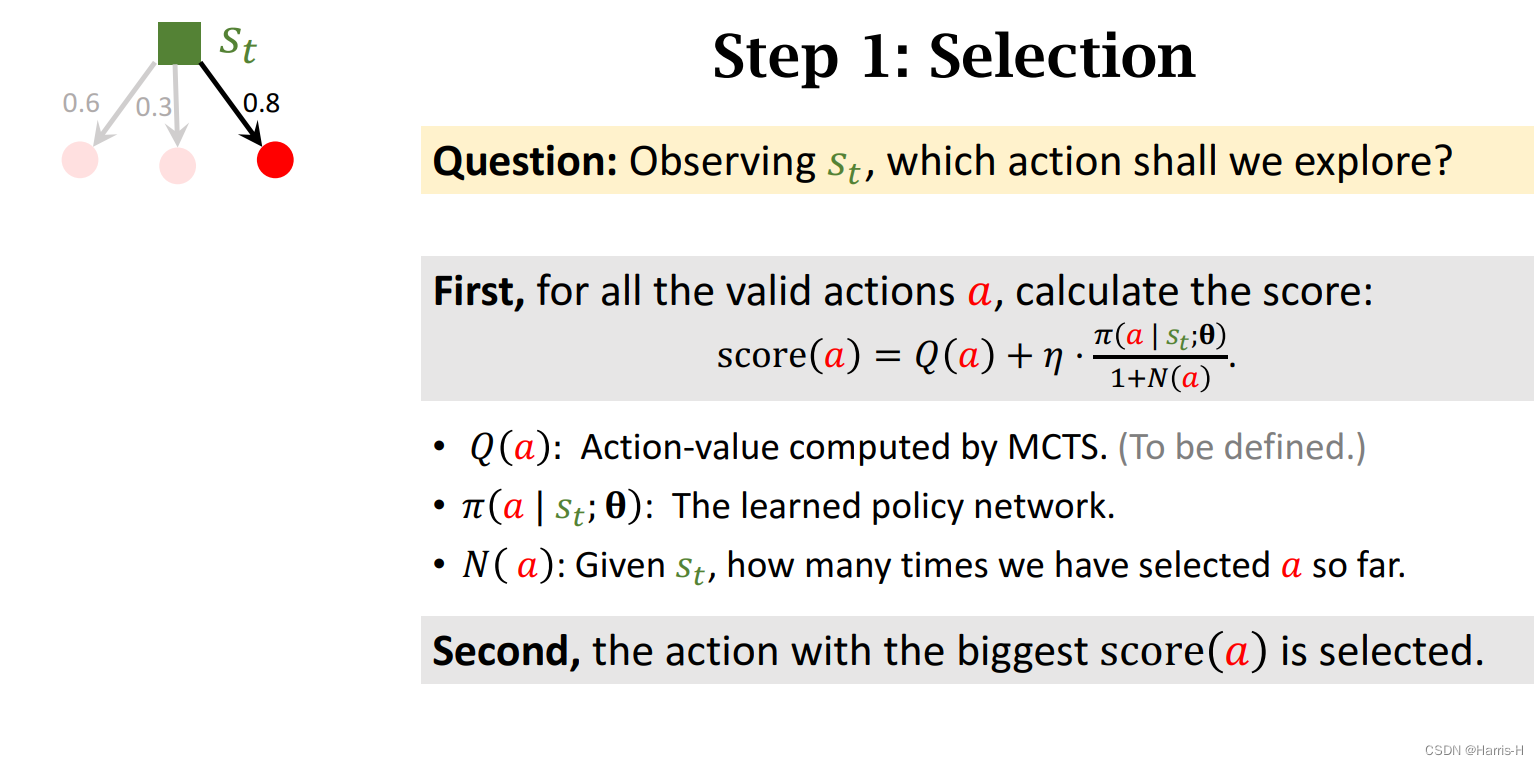
注意这里由 M C T S MCTS MCTS计算的 Q ( a ) Q(a) Q(a)是一张表,叫做动作价值表,组成每个动作打分的一部分。
N ( a ) N(a) N(a)表示动作 a a a至今执行的次数。
统计完所有的动作的打分。
选择打分最大的动作,假装执行。
然后进行自我对抗,不断假想执行动作。
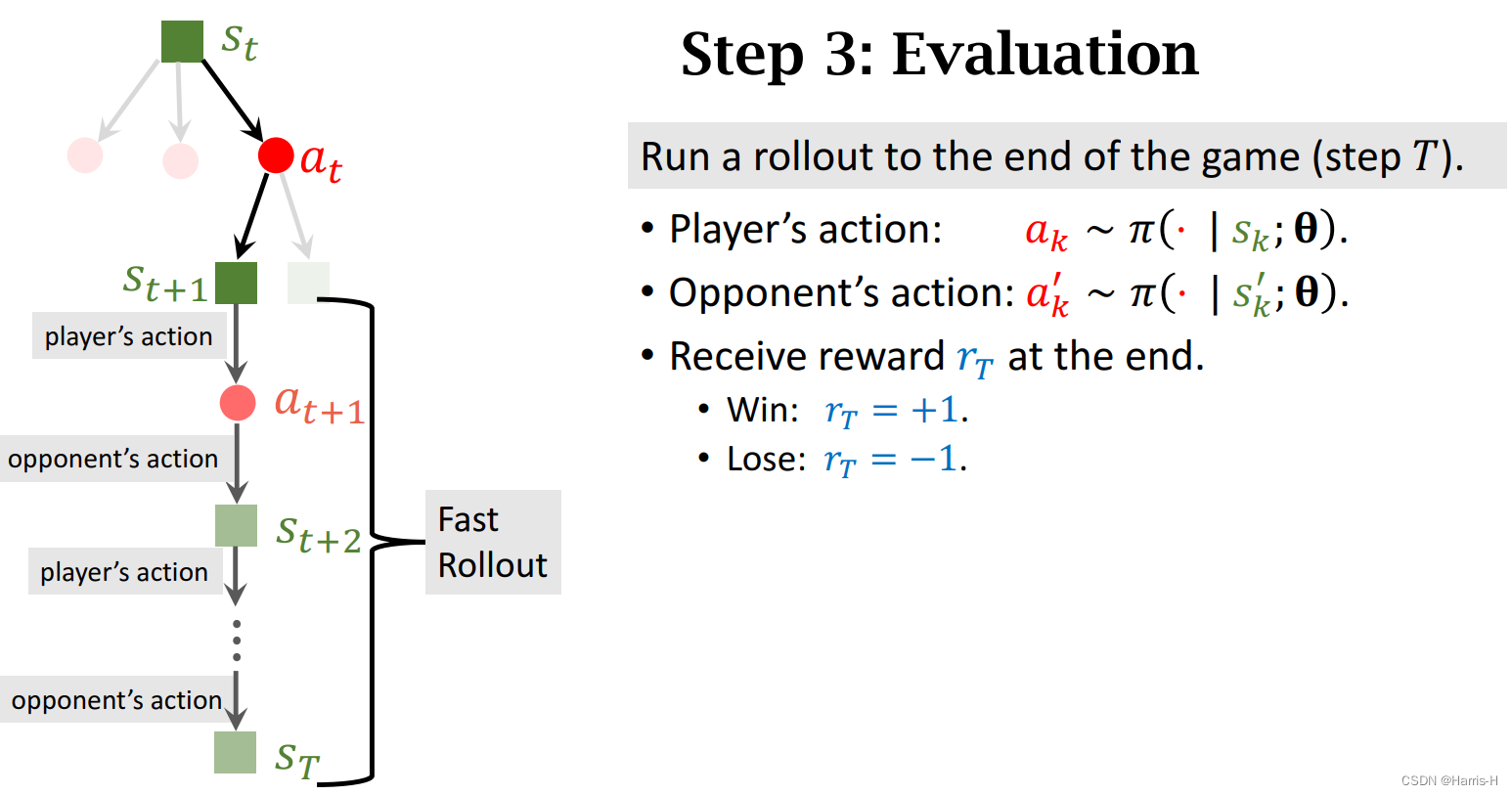
然后计算奖励 r T r_T rT
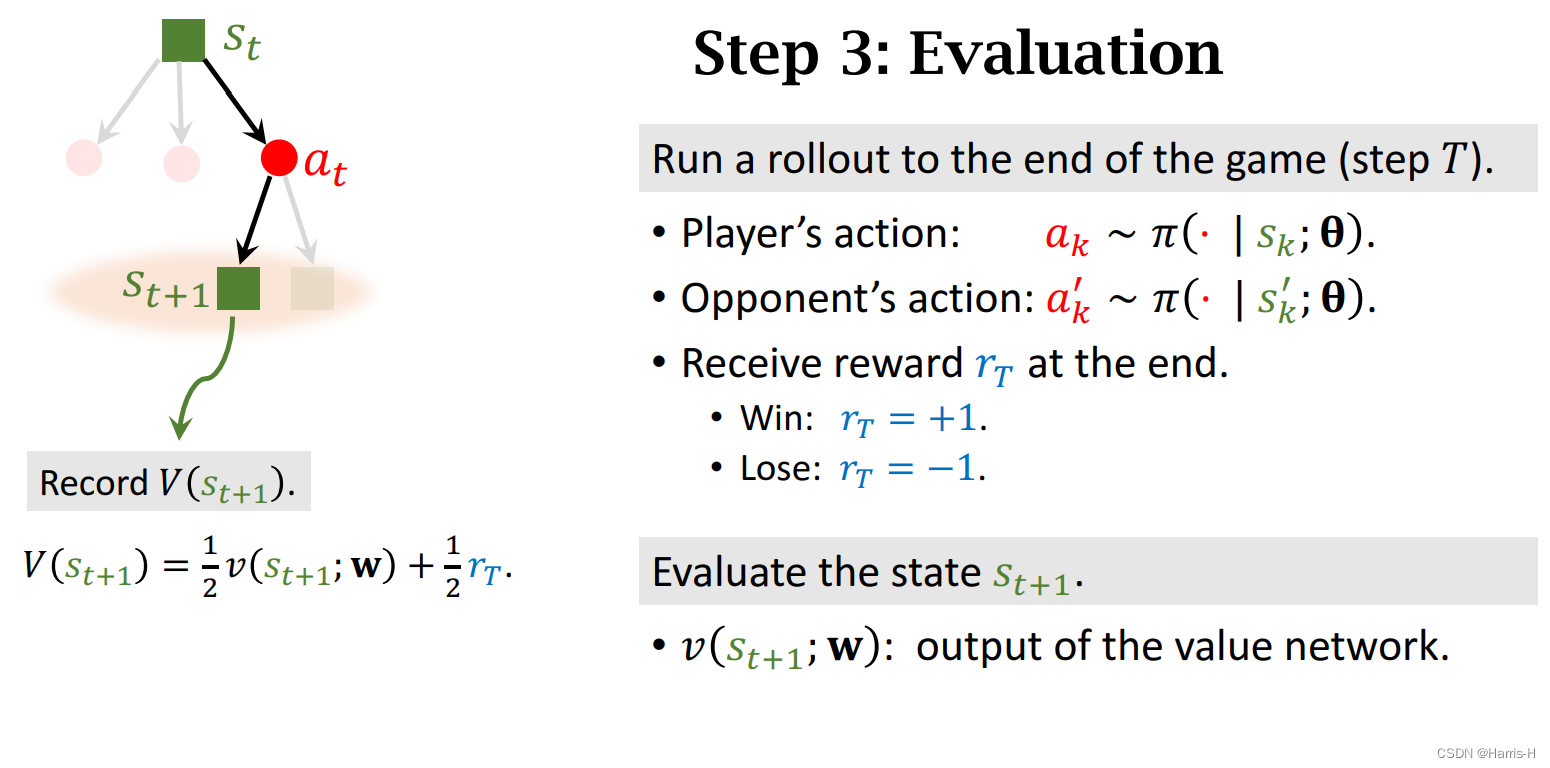
然后计算 V ( s t + 1 ) V(s_{t+1}) V(st+1) ,等于价值网络输出和奖励 r T r_T rT的均值。
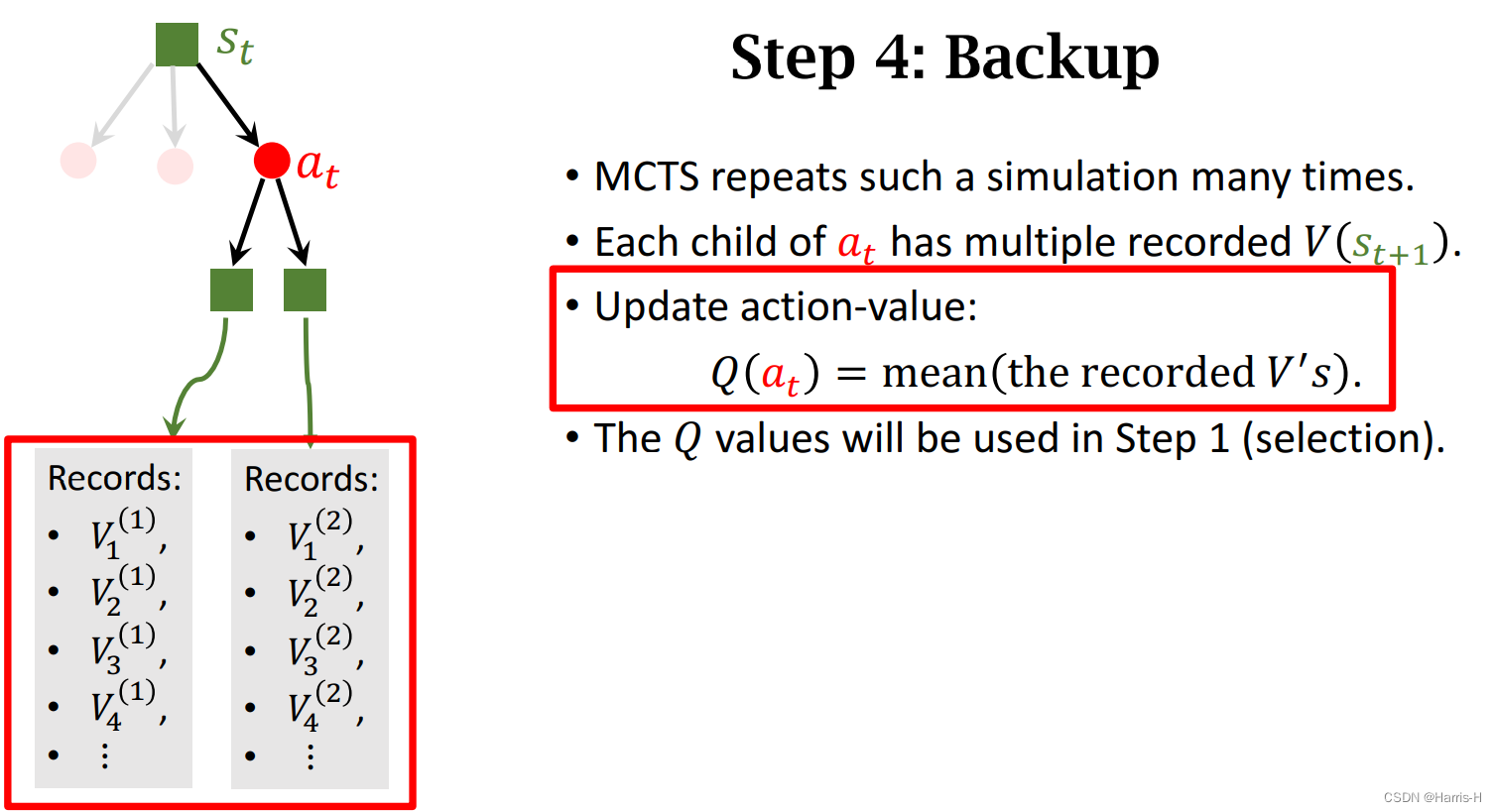
注意每个动作存在多个 V ( s t + 1 ) V(s_{t+1}) V(st+1),因此我们采用平均值表示动作的价值 Q ( a t ) Q(a_t) Q(at)
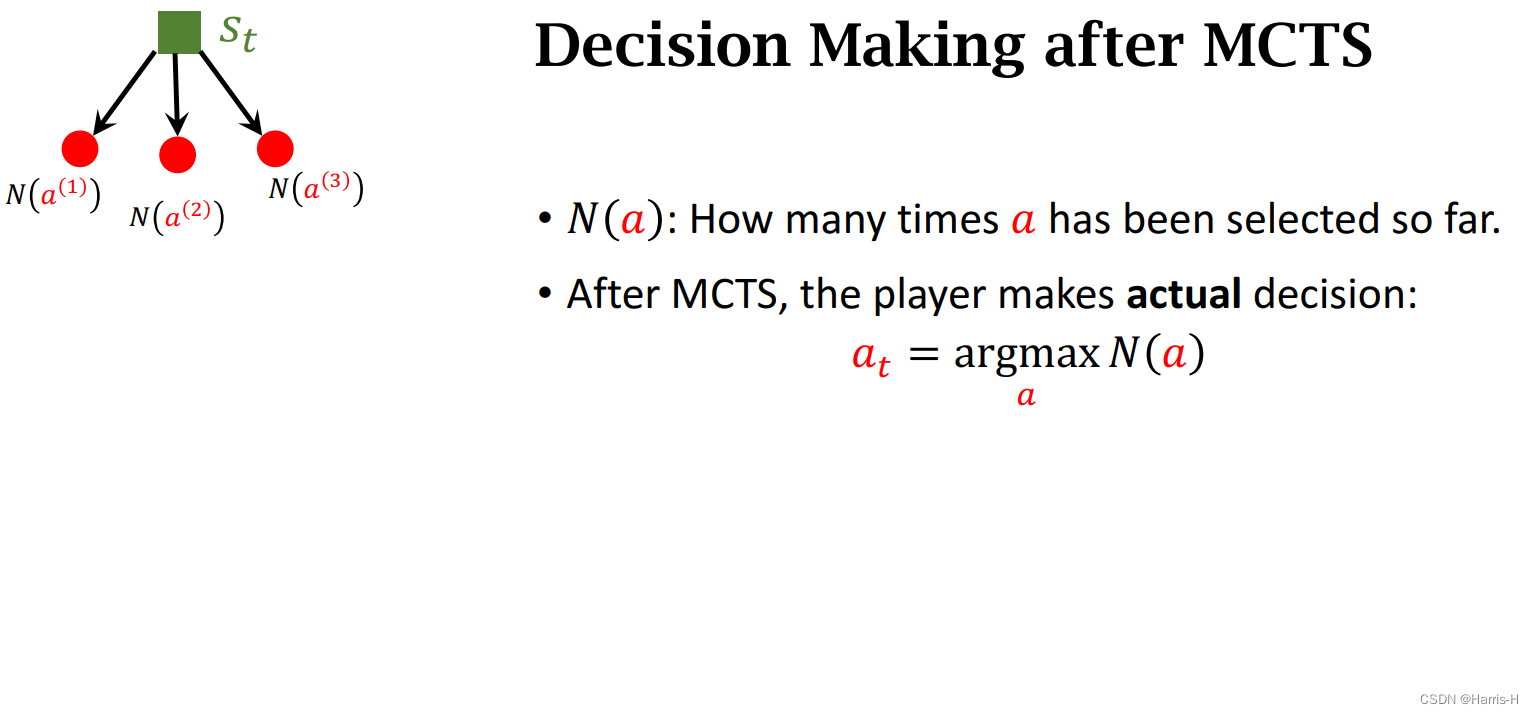
然后根据 N ( a ) N(a) N(a)选择最大实际执行该动作。
MCTS总结
6.新版的AlphaGo Zero
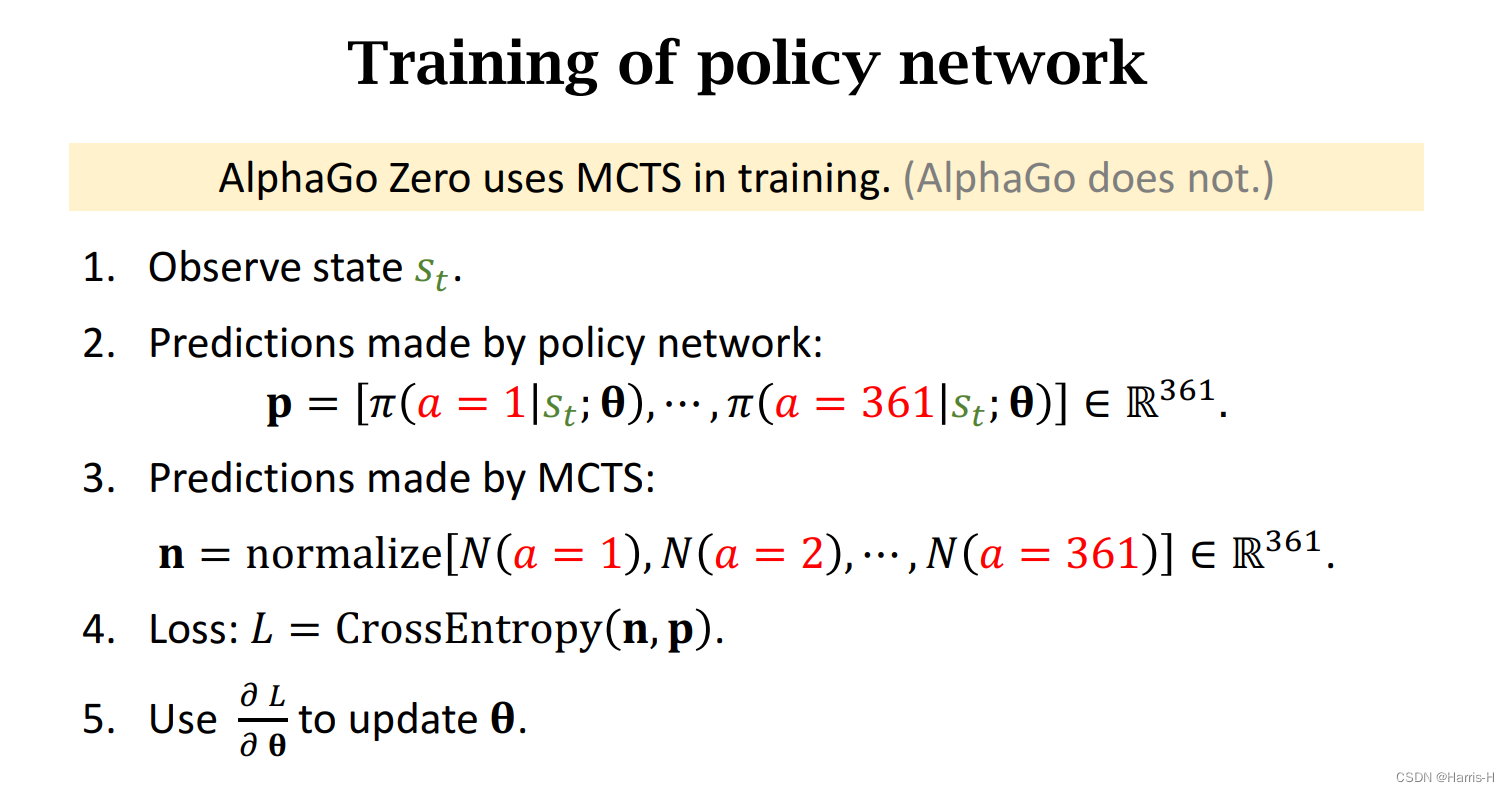
与老版本不同的时,完全不依赖于人类经验,并且在策略网络也是用MCTS训练。
事实证明, 人类经验对于AlphaGo的学习有副作用。
但是不能说人类经验对任何学习都无用,比如在医疗和自动驾驶方向,采用behavior cloning节省大量成本,不需要真实实验,避免不必要的危险和码分。
Zero策略网络的训练方法
-
相关阅读:
2022-06-28-冒泡排序&选择排序
Java中的一些不常见的关键字
代理的匿名级别有哪些?为什么匿名性很重要?
Docker安装Zookeeper、RocketMQ
电脑USB、HDMI、DP各种接口及速度
动态欧拉角与静态欧拉角的区别
【UE5 C++基础 05】UBT基础
4.8 Verilog过程连续赋值
YOLOv5、YOLOv8改进:HorNet完全替换backone
【ACG】博主在专栏更新内容后,及时通知关注他的用户去阅读
- 原文地址:https://blog.csdn.net/weixin_45750972/article/details/126782828