-
【滤波跟踪】基于matlab最近邻算法多目标航迹关联【含Matlab源码 2093期】
✅博主简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,Matlab项目合作可私信。
🍎个人主页:海神之光
🏆代码获取方式:
海神之光Matlab王者学习之路—代码获取方式
⛳️座右铭:行百里者,半于九十。更多Matlab仿真内容点击👇
Matlab图像处理(进阶版)
路径规划(Matlab)
神经网络预测与分类(Matlab)
优化求解(Matlab)
语音处理(Matlab)
信号处理(Matlab)
车间调度(Matlab)⛄一、最近邻算法多目标航迹关联简介
1 引言
多传感器的航迹关联是多传感器信息融合系统中的关键技术之一,现有的航迹关联技术大多是在没有系统偏差情况下进行的。存在系统偏差会造成这些关联算法性能急剧下降。而有系统偏差的图像配准方法和基于目标参照拓扑的航迹关联方法,是基于航迹历史信息的航迹关联算法,实时性不高。提出的全局最近邻算法在无系统偏差情况下具有很好的关联效果,但在有系统偏差情况下,该算法会随着系统偏差的增加其关联性能急剧的下降。基于此,全局最近邻算法的基础上,采用了一种修正全局最近邻的航迹关联算法。文中利用航迹位置偏差和航迹距离偏差进行航迹预关联,继而为全局最近邻的航迹关联算法提供可靠的先验信息,
2 系统模型
在笛卡尔坐标系中, 分布于(XA,YB)处的雷达A和(XB,YB)处的雷达B。雷达的量测值为(Rs,θs),其中s表示雷达A和雷达B,Rs表示量测距离,θs表示量测方位角。雷达s的量测模型是:

雷达s的本地极坐标系转换到公共笛卡尔坐标系中的坐标值是:

其中,(Xs,Ys)表示雷达s的量测值转换到公共笛卡尔坐标系中的值。3 基于全局最近邻法的航迹关联
若雷达A中的航迹和雷达B的航迹预关联成功,则定义两航迹距离为:

对预关联失败的两航迹间的距离定义为:D(i,j)=+∞ (22)
对同一时刻雷达A和雷达B的所有航迹都进行预关联可得到关联距离矩阵DnA×nB。得到关联距离矩阵后,可以将航迹关联视为一个最优分配问题,分配原则应满足:1)每一行只能分配一个元素;2)每一列只能分配一个元素;3)所有分配元素值的总和要最小。航迹关联问题可描述为:
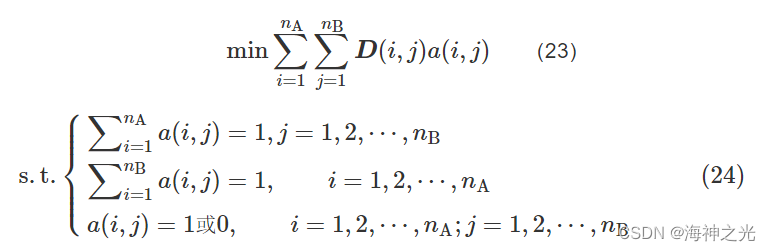
其中,a(i,j)=1两航迹关联成功,a(i,j)=0表示两航迹关联失败。⛄二、部分源代码
clc;
clear all;
close all;
T=4; %采样间隔
spoint=40;%控制采样数据点
strack=30;%控制航迹对数
num=1; %仿真次数deltrou1=170; %%% 信息源1的参数
deltsita1=0.3*pi/180;
deltv1=12;deltrou2=180; %%% 信息源2的参数
deltsita2=0.3*pi/180;
deltv2=20;
coordinate1=[125e3,125e3]; %%% 信息源1的坐标
coordinate2=[235e3,130e3]; %%% 信息源2的坐标Ect=zeros(num,spoint); %各次仿真的正确关联率
Eet=zeros(num,spoint); %各次仿真的错误关联率
Ec=zeros(1,spoint); %平均正确关联率
Ee=zeros(1,spoint); %平均错误关联率for z=1:num %蒙特卡洛仿真次数
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%%% 变量的设置 %%%%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
X1G=zeros(2,spoint,strack);%存储站1估计值
X2G=zeros(2,spoint,strack);%存储站2估计值
XY1=zeros(4,1,strack); %存储站1预测值
XY2=zeros(4,1,strack); %存储站2预测值Z1L=zeros(4,spoint,strack);%存储理论值 Z2L=zeros(4,spoint,strack);%存储理论值 Z1G=zeros(4,spoint,strack);%存储站1观测值 Z2G=zeros(4,spoint,strack);%存储站2观测值 Z1LL=zeros(4,spoint,strack);%存储理论值 Z2LL=zeros(4,spoint,strack);%存储理论值 %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%%% 参数的设置 %%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% A=[1,T,0,0;... 0,1,0,0;... 0,0,1,T;... 0,0,0,1]; H=[1 0 0 0;... 0 0 1 0]; %观测矩阵 %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%% 设置航迹,初始点在(0,0),(380000,0),(380000,270000),(0,270000)区域内正态分布, %%% 初始速度和初始航向分别在4—1200m/s和0—2π之间均匀分布 centerpointx=380e3/2; centerpointy=270e3/2; for j=1:strack pointx=centerpointx+centerpointx*randn(1)/5; pointy=centerpointy+centerpointy*randn(1)/5; sita=2*pi*rand(1); vx=(4+(1200-4)*rand(1))*cos(sita); vy=(4+(1200-4)*rand(1))*sin(sita); Z1L(:,1,j)=[pointx,vx,pointy,vy]'; %%% 先设定每对航迹第一个点的 x,y 值 Z2L(:,1,j)=[pointx,vx,pointy,vy]'; end for j=1:strack for k=1:spoint-1 Z1L(:,k+1,j)=A*Z1L(:,k,j); %存储理论值 站1,2 Z2L(:,k+1,j)=A*Z2L(:,k,j); end end %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%% 转换到各自的 rou-sita坐标下加上噪声---这才是模拟的雷达直接测得的数据:距离,角度,速度 Drousita1=zeros(3,spoint,strack); Drousita2=zeros(3,spoint,strack); for j=1:strack for i=1:spoint Drousita1(1,i,j)=sqrt((Z1L(1,i,j)-coordinate1(1))^2+(Z1L(3,i,j)-coordinate1(2))^2)+deltrou1*randn(1); if (Z1L(3,i,j)-coordinate1(2))>0 &&(Z1L(1,i,j)-coordinate1(1))>0 Drousita1(2,i,j)=atan((Z1L(3,i,j)-coordinate1(2))/(Z1L(1,i,j)-coordinate1(1)))+deltsita1*randn(1); elseif (Z1L(3,i,j)-coordinate1(2))>0 &&(Z1L(1,i,j)-coordinate1(1))<0 Drousita1(2,i,j)=pi+atan((Z1L(3,i,j)-coordinate1(2))/(Z1L(1,i,j)-coordinate1(1)))+deltsita1*randn(1); elseif (Z1L(3,i,j)-coordinate1(2))<0 &&(Z1L(1,i,j)-coordinate1(1))<0 Drousita1(2,i,j)=pi+atan((Z1L(3,i,j)-coordinate1(2))/(Z1L(1,i,j)-coordinate1(1)))+deltsita1*randn(1); else Drousita1(2,i,j)=atan((Z1L(3,i,j)-coordinate1(2))/(Z1L(1,i,j)-coordinate1(1)))+deltsita1*randn(1); end Drousita1(3,i,j)=sqrt(Z1L(2,i,j)^2+Z1L(4,i,j)^2)+deltv1*randn(1); end- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
⛄三、运行结果




⛄四、matlab版本及参考文献
1 matlab版本
2014a2 参考文献
[1] 陈中华,王国宏,关成斌,谭顺成.基于修正全局最近邻的有系统偏差的航迹关联算法[J].弹箭与制导学报. 2012,32(01)3 备注
简介此部分摘自互联网,仅供参考,若侵权,联系删除🍅 仿真咨询
1 各类智能优化算法改进及应用
生产调度、经济调度、装配线调度、充电优化、车间调度、发车优化、水库调度、三维装箱、物流选址、货位优化、公交排班优化、充电桩布局优化、车间布局优化、集装箱船配载优化、水泵组合优化、解医疗资源分配优化、设施布局优化、可视域基站和无人机选址优化2 机器学习和深度学习方面
卷积神经网络(CNN)、LSTM、支持向量机(SVM)、最小二乘支持向量机(LSSVM)、极限学习机(ELM)、核极限学习机(KELM)、BP、RBF、宽度学习、DBN、RF、RBF、DELM、XGBOOST、TCN实现风电预测、光伏预测、电池寿命预测、辐射源识别、交通流预测、负荷预测、股价预测、PM2.5浓度预测、电池健康状态预测、水体光学参数反演、NLOS信号识别、地铁停车精准预测、变压器故障诊断3 图像处理方面
图像识别、图像分割、图像检测、图像隐藏、图像配准、图像拼接、图像融合、图像增强、图像压缩感知4 路径规划方面
旅行商问题(TSP)、车辆路径问题(VRP、MVRP、CVRP、VRPTW等)、无人机三维路径规划、无人机协同、无人机编队、机器人路径规划、栅格地图路径规划、多式联运运输问题、车辆协同无人机路径规划、天线线性阵列分布优化、车间布局优化5 无人机应用方面
无人机路径规划、无人机控制、无人机编队、无人机协同、无人机任务分配6 无线传感器定位及布局方面
传感器部署优化、通信协议优化、路由优化、目标定位优化、Dv-Hop定位优化、Leach协议优化、WSN覆盖优化、组播优化、RSSI定位优化7 信号处理方面
信号识别、信号加密、信号去噪、信号增强、雷达信号处理、信号水印嵌入提取、肌电信号、脑电信号、信号配时优化8 电力系统方面
微电网优化、无功优化、配电网重构、储能配置9 元胞自动机方面
交通流 人群疏散 病毒扩散 晶体生长10 雷达方面
卡尔曼滤波跟踪、航迹关联、航迹融合 -
相关阅读:
Linux综合实践(Ubuntu)
CMake 判断操作系统类型
Monte Carlo Algorithms
优秀的 OKR 案例参考
解决FeignClient被FallBack后无错误日志打印问题
【mcuclub】温度传感器DS18B20
Ansible 企业级自动化运维平台开发实战
helm kubernetes包管理工具
Apollo自动驾驶系统概述(文末参与活动赠送百度周边)
云开发入门教程-数据库查询指令介绍-等值查询
- 原文地址:https://blog.csdn.net/TIQCmatlab/article/details/126734132
