-
【计算机视觉】OpenCV算法解析
0. 前言
此篇主要介绍opencv大坑,以及对前面没有学到的比较简单的常见算法进行补充:包括最小二乘法、RANSAC、哈希算法
1. OpenCV
-
OpenCV是一个开源的计算机视觉库。OpenCV 库用C语言和 C++ 语言编写,可以在 Windows、Linux、Mac OS X 等系统运行。同时也在积极开发Python、Java、Matlab 以及其他一些语言的接口,将库导入安卓和 iOS 中为移动设备开发应用。
-
opencv大坑之BGR
opencv对于读进来的图片的通道排列是BGR,而不是主流的RGB
#opencv读入的矩阵是BGR,如果想转为RGB,可以这么转 img4 = cv2.imread('1.jpg') img4 = cv2.cvtColor(img4,cv2.COLOR_BGR2RGB)- 1
- 2
- 3
-
使用OpenCV优势
-
除了opencv读入的彩色图片以BGR顺序存储外,其他所有图像库读入彩色图片都以RGB存储。
-
除了PIL读入的图片是img类之外,其他库读进来的图片都是以numpy 矩阵。
-
各大图像库的性能,最好的OpenCV,无论是速度还是图片操作的全面性,都属于碾压的存在,毕竟他是一个巨大的cv专用库。
-
-
OpenCV常见算法
-
图像的基本操作读取、显示、存储:通过调用OpenCV中的cv2.imread(),cv2.imshow(),cv2.write()分别实现。
-
图像的几何变换:平移、缩放、旋转、插值(最近邻、双线性)。
-
2. 线性回归算法:最小二乘法
复习:线性回归
举个例子,某商品的利润在售价为2元、5元、10元时分别为4元、10元、20元,我们很容易得出商品的利润与售价的关系符合直线:y=2x.在上面这个简单的一元线性回归方程中,我们称“2”为回归系数,即斜率为其回归系数。回归系数表示商品的售价(x)每变动一个单位,其利润(y)与之对应的变动关系。
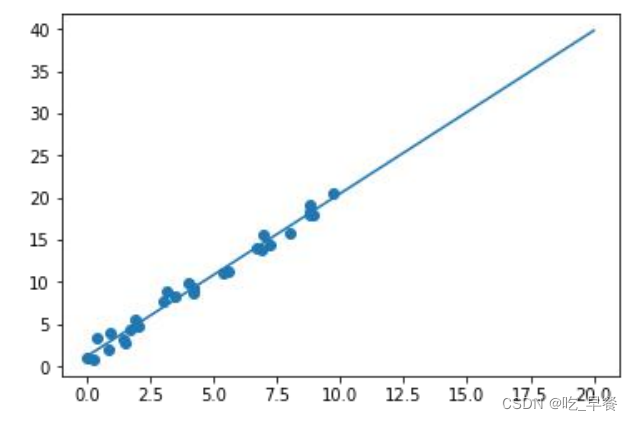
线性回归表示这些离散的点总体上“最逼近”哪条直线。
-
最小二乘法:通过最小化误差的平方和,寻找数据的最佳函数匹配。 (也就是寻找最佳的那条直线,最终就是寻找残差的最小值)最小二乘法通过计算最小均方差关于参数a、b的偏导数为零时的值。事实上,很多情况下,最小二乘法都是线性回归的代名词。
-
利用最小二乘法可以简便地求得未知的数据,并使得这些求得的数据与实际数据之间误差的平方和为最小。
-
解释:假设我们现在有一系列的数据点(xi,yi) (i=1,…,m),那么由我们给出的拟合函数h(x)得到的估计量就是h(xi) 。残差:ri = h(xi) – y
-
适用情况:最小二乘法只适合于误差较小的情况,因为该算法不会去除噪声(离群数据),故会对最后的结果产生影响。
-
三种范数: (计算残差)
-
∞-范数:残差绝对值的最大值,即所有数据点中残差距离的最大值:
(数据多时计算量太大,不具有可操作性)
m a x 1 ≤ i ≤ m ∣ r i ∣ max_{1≤i≤m}|{r_i}| max1≤i≤m∣ri∣ -
1-范数:绝对残差和,即所有数据点残差距离之和:
(数据多时计算量太大,不具有可操作性)
∑ i = 1 m ∣ r i ∣ \sum_{i=1}^{m}|{r_i}| i=1∑m∣ri∣ -
2-范数:残差平方和:( 一般都选择二范式)
∑ i = 1 m r i 2 \sum_{i=1}^{m}{r_i}^2 i=1∑mri2
-
-
拟合程度:我们的拟合函数h(x)与待求解的函数y之间的相似性。
2-范数越小,相似性就比较高。
-
算法最终目的:找一个残差的最小值,然后找到最佳函数(对应于以下公式中的平方和最小的时候的k和b的值)
m i n a , b ∑ n = 1 N ( y n − ( k × x + b ) ) 2 min_{a,b}\sum_{n=1}^N(y_n-(k×x+b))^2 mina,bn=1∑N(yn−(k×x+b))2这是一个无约束的最优化问题,根据以上公式分别对k和b求偏导,然后令偏导数为0,即可获得极值点。
k = N ∑ n = 1 N
-
-
相关阅读:
最新冠军方案开源 | MOTRv2:YOLOX与MOTR合力打造最强多目标跟踪!(旷视&上交)...
基于Tucker分解的时序知识图谱补全10.23
Web自动化成长之路:selenium基础操作
重学java 58.红黑树相关集合
Vue rules校验规则详解
Devexpress GridControl GridView表中列增加按钮
vue项目中常用正则大全
23种设计模式之分类总结
AIGC系列:1.chatgpt可以用来做哪些事情?
SAP 快速Debug财务替代GGB1
- 原文地址:https://blog.csdn.net/m0_52923241/article/details/126729323